
基于STM32 的智能仓储小车设计
2023-12-09 08:07岑勋仪黄学润李家航邱秀英白洪宇覃光锋
机电产品开发与创新 2023年6期
岑勋仪, 黄学润, 李家航, 邱秀英, 白洪宇, 覃光锋
(广西科技师范学院, 广西 来宾 546199)
0 引言
传统农场的货物,比如肥料,饲料,稻谷等只能由人工搬运。效率低,人工成本高,在农忙季节,严重影响了生产效率, 容易造成经济负增长。 随着人们生活水平的提高和物流需求的不断增加,智能仓储逐渐成为物流业的重要组成部分。 在智能仓储中, 智能小车则扮演着非常重要的角色,现在的智能小车不再是“货找人”和“人找货” 的方式。 可通过先进的算法结合物联网的万物互联来实现将人们的想法“告诉”给我们的智能小车。 它可以实现库房内货物的即时运输,提高仓储效率和管理水平。
本文通过应用物联网技术, 设计一款智能仓储智能小车,实现智能无线遥控和自动寻迹。 该小车还具有避障检测、行驶状态检测等功能。 本文主要介绍该智能小车的结构设计、硬件实现和系统软件实现。 智能小车有很多,虽然能灵活、准确、有效地搬运货物,等对于现在的生产要求是远远达不到的。 我们针对现代的产业要求,设计了一种有效解决的问题的方案。 能帮助我们实现更高的工作效率。
智能仓储小车的智能化程度很高, 能实现基本的充电、按照指定程序来实现搬运货物、识别货物等要求。 有效解决了传统仓储作业的繁重工作, 还可以代替人们进行一些危险的工作。 在一些奶牛农场上作业,传统的仓储小车容易发生故障,从而点燃干草等一些物品。 从而应发火灾,危害广大农事从业者的财产和生命安全。 小车具有一定的诊断能力,当电量不足时,能自觉规划最优路线进行返回充电。 对于日常中可能会存在故障,能给出对应的故障代码,方便后期的维修。
1 作品的功能
设计一个有摄像头和避障功能和手机控制的小车,作品的功能应满足以下条件:
1.1 摄像头功能
小车配备有高清晰度的摄像头, 可用于环境感知和物品识别。通过实时监测仓库里的场景,智能仓储小车可以迅速获取感兴趣的物品位置等信息, 并根据需要调整自身的行进方向和速度。此外,摄像头功能还可以将图片和视频传输到手机等智能终端设备上进行实时监控和远程控制。
1.2 手机控制功能
智能仓储小车提供了手机控制功能, 可以远程操纵小车的行动。 用户只需通过APP 等应用程序,即可在任何地方掌控小车的运动方向、速度、停止等行为。此外,用户还可以通过手机查看小车的实时状况、 更改导航点和任务等设置,大大提高了物流操作的便利性和效率。
1.3 机械臂功能
用多个舵机进行组成多关节机械臂, 可用于自主抓取和放置物品。通过先进的控制算法和传感器技术,机械臂可以实现高精度的物品抓取和放置功能, 并完成各种不同形状和尺寸的物品搬运任务。此外,机械臂还可以与智能识别技术结合,实现标识物品类型、大小和重量等信息的自动识别和分类处理, 提高仓库物品操作的智能化和自动化水平。
1.4 小车的动力控制系统
为了实现小车高精度的动力系统控制, 我们去掉原先的直流电机采用精度更为准确的,步进电机、能小车精准停在可控范围。
2 解决主要问题
(1)如何用STM32 单片机为主控芯片,进行小车的控制与通信的设计。
(2)如何设计摄像头和通信模块的结合,然后通过手机进行控制和查看。
(3)设计小车的动力系统和机械臂的控制系统,应如何进行控制和把握精度。
(4)通过整合相应模块进行开发智能小车和完善小车的功能性。
3 设计要求
在设计智能小车系统时,需要考虑以下设计要求:
(1)功能要求:实现自动寻迹、货物存储和检索功能,支持图像采集和处理,提供远程控制功能。
(2)稳定性要求:系统应具有稳定的运行性能,能够准确识别和抓取目标物品。
(3)可靠性要求:系统应具备良好的抗干扰能力,能够适应不同环境下的运行需求。
(4)灵活性要求:系统应支持手动和自动两种模式切换,能够满足用户不同的操作需求。
(5)用户友好性要求:系统应具有简洁直观的操作界面,方便用户使用和控制。
4 总体设计方案
基于上述设计要求,本系统的总体设计方案如下:
4.1 硬件设计
选择STM32F103C8T6 单片机作为主控芯片,通过串口与OV7725 摄像头模块进行通信。 采用PWM 技术控制直流电机和伺服电机,实现小车的运动和抓取功能。通过通信模块与终端设备进行数据交互。
4.2 软件设计
主控程序使用C 语言编写, 利用STM32 CubeMX 进行初始化配置, 实现与摄像头模块的串口通信和图像数据处理。设计自动寻迹算法,根据图像信息控制电机运动和伺服电机动作。开发手机APP,通过蓝牙或无线网络与小车进行通信,实现远程控制功能。
4.3 功能模块设计
包括图像采集和处理模块、自动寻迹模块、货物存储和检索模块、远程控制模块等。每个模块根据功能需求进行设计和实现,保证模块之间的协调和配合。
4.4 设计系统框图
设计系统框图如图1 所示。

图1 基于STM32 的智能仓储小车设计系统框图
5 模块功能介绍
5.1 摄像头模块
本系统采用的摄像头为K210 模块,K210 模块具有强大的开源库,可以实现多种功能,并具有数据存储的卡槽,可以存储大量的数字模板,方便进行多模板匹配。 通过摄像头模块实时采集环境中的图像数据。 可进行图像处理,根据图像采集的数据,摄像头通过串口通信协议与主控模块建立联系,实现小车的自主运动[1-2]。扫描货物上的二维码,获取货物信息。控制伺服电机将货物抓取并放置到小车的货架上。
5.2 远程控制模块
当小车在运行过程中遭遇障碍物时, 通过单片机的中断功能发送信号,程序的设计更合理,对单片机资源的消耗也最小。 中断函数中需要计算超声波的通过手机APP 与小车进行通信[3]。提供手动模式下的运动控制和伺服电机动作控制。实现小车的自主运动,使用户能够轻松控制小车来进行相关的工作。
6 硬件设计
智能仓储小车的硬件电路设计主要是由5 个部分组成:主控芯片的电路设计、摄像头0V7725 的电路设计、动力系统控制的电路设计、舵机的控制设计、电源供电设计。
6.1 主控芯片电路
主控芯片电路如图2 所示,主控芯片STM32F103C8T6与外设的连接采用的是STM32 标准外设接口,其中PA2和PA2 引脚分别作为USART2 的TX 和RX 引脚, 实现与通信模块的串口通信; 主控模块还连接了一个8MHz的晶振作为主频源,提供时钟信号和一个。 为了保证系统的稳定性和可靠性, 主控模块的电路中还加入了电源滤波器和复位电路。 其中加入电源滤波电容,用于过滤电源杂波。
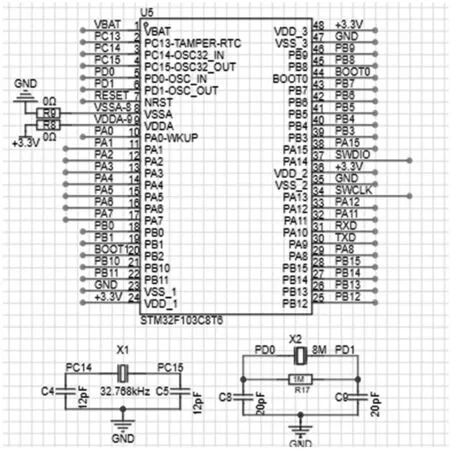
图2 主控芯片电路
6.2 摄像头0V7725
选用OV7725 摄像头模块用于图像采集。 OV7725 具有高度集成的CMOS 图像传感器, 能够以高分辨率和快速帧率进行图像捕捉,适用于实时图像处理应用。
摄像头模块电路如图3 所示,由于采用的是0V7725的集成模块所以只需通过串口来进行接收数据, 如图接到PA9、 PA10 引脚进行与单片机的USART1 的引脚。 即可发送和接收数据。

图3 摄像头模块电路
6.3 动力系统电路设计
动力系统电路设计图如图4 所示,由于小车只需要2个轮子所以采用2 组步进电机做控制,具体接线如下:
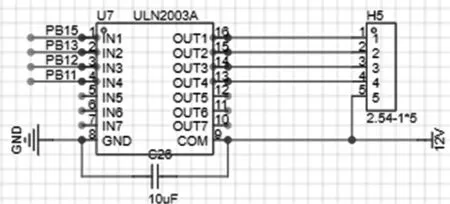
图4 动力系统电路设计图
(1)电源引脚:正极(Vcc):连接到电源的正极,通常为直流电源的正端。
(2)负极(GND):连接到电源的负极,通常为直流电源的地端。
(3)控制引脚:输入1(IN1)输入3(IN3):连接到控制信号的引脚PB15、PB12,用于控制电机的转向或运动状态。
(4)输入2(IN2)输入4(IN4):连接到控制信号的引脚PB13、PB11,与IN1、IN3 相结合使用,用于控制电机的转向或运动状态。
6.4 通信模块
为实现与终端设备的通信,选择合适的通信模块,如蓝牙模块或无线网络模块。 通信模块可以与手机或其他终端设备进行无线通信, 使用户能够通过手机APP 控制小车的运动和操作。 本设计选用了ESP-01S WiFi 模块,该模块采用的核心处理器ESP8266[4],如图5 所示。

图5 无线WIFI 原理图
其中,ESP8266 模块的VCC 引脚接3,3V 电源,GND引脚接地,TX 引脚连接单片机的RX 引脚,RX 引脚连接单片机的TX 引脚。ESP8266 模块通过串口与单片机进行通信,实现数据的传输。 同时,ESP8266 模块的GPIO0 引脚接地,GPIO2 引脚接高电平,以实现正常工作。
6.5 舵机的控制电路设计
为了实现机械臂的控制我们需要6 组舵机进行机械臂的组装, 因此为了能控制舵机我们采用12V 的30kg 舵机。 并设计一个组排,电源引脚同一进行短接VCC 和共地控制引脚则 有PA6、PA7 、PB0 、PB1 PA1 、PA0 等引脚组成控制信号端,当单片机输出PWM 波时对舵机的控制通过占空比的大小进行舵机角度的控制,具体接线见图6。
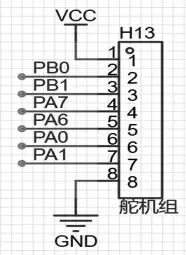
图6 舵机组接线图
6.6 电源供电电路设计
由于整个电路系统除了动力和舵机系统其他模块都采用3.3V 电源供电因此必须设计一个供电系统,为此选出ASM117 降压稳压芯片进行电压稳压降压,为了保证芯片的稳定性。 应在电源芯片两路加上滤波电容,进行滤除杂波,保证芯片能正常工作,为了能看到现象,加入电源指示灯。 具体电路如图7 所示。

图7 电源供电设计
7 软件设计
系统的软件设计运用C 语言开发语言来进行编程。使用的编程工具是keiluvision5 软件,这款编程软件是一款很方便并且功能齐全的IDE。 系统的主程序在总体上控制着各个模块, 进行个个模块的数据接收和处理并控制智能小车的功能,本系统由3 个模块组成:
(1)摄像头模块子程序流程图如图8 所示。

图8 摄像头模块子程序流程图
(2)通信模块子程序流程图如图9 所示。

图9 通信模块子程序流程图
(3)舵机、电机控制模块子程序流程图如图10 所示。

图10 舵机、电机控制模块子程序流程图
本设计通过硬件和软件的测试后, 发现小车在手动模式下可通过APP 控制,在自动模式下可以通过二维码扫描或物品扫描检测到是否匹配。 当匹配时则控制机械臂进行抓取。 后返还到卸货地。
8 结束语
传统仓储行业与现代仓储行业相结合的货物精准搬运模式和智能仓储小车对工作环境的适用性能极大提升仓储物流的效率。 在如今国家政策要大力发展制造业以及物流行业。 仓储的精准搬运、高效率和高实用性对于制造业企业的成本有着直接的影响。 在各种货物搬运中,如此复杂的环境和不同形状的货物,任意一个环节都不能出现错误,否则对企业的影响是巨大的。本文通过物联网的万物互联将使我们能更好地、 更方便地控制我们的智能仓储小车。 智能、高效的电路与模块的选择让智能仓储小车能在复杂的环境下稳定地工作。 相对于目前市场上出现的智能小车,我们设计的智能仓储小车提高了自身的安全性, 能极大地保护人们的财产和生命安全。 解放人们的双手,用机器去代替繁重且重复的工作, 让人们去把更多的精力去投入创造性的工作。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
自动化学报(2019年6期)2019-07-23
文苑(2018年22期)2018-11-19
电子测试(2018年13期)2018-09-26
电子制作(2018年8期)2018-06-26
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
