六自由度电动缸姿态仿真平台结构及控制系统设计
2023-12-09 10:42:24王辉钦
机电信息 2023年23期
王辉钦
(漳州世辉电子科技有限公司,福建漳州 363000)
0 引言
六自由度运动平台为可在六个自由空间运动,并能仿真模拟各种姿态的运动装备[1],集精密伺服控制系统、电气系统、机械系统、传感检测系统等多种技术于一体,具有高稳定性、高精度控制、高承载、快速响应的特点[2],可为模拟驾驶训练提供安全、逼真、高效的辅助平台,同时节省大量财力、人力及物力[3]。随着工业技术的发展及核心技术领域竞争的加剧,六自由度运动平台成为各国竞争的焦点[4],其应用领域也在不断拓展,如航空航天、航海、医疗设备、娱乐设施、微动机构、军事装备、并联机床、车辆驾驶等[5],已经成为现代工业领域的重要工具,是一个国家在机械控制领域发展水平的象征。运动平台的多自由度运动通过电动缸实现,与传统液压缸、气缸相比,电动缸可控性强、精度更高、运动速度更快,在现代工业领域应用越来越广泛[6]。目前,六自由度平台常采用Stewart结构,其存在控制系统复杂、体型大、空间小等问题[7],因此,本文采用折返式电动缸、滚珠丝杆等成熟的构件,自主设计了一种六自由度电动缸姿态仿真平台及其控制系统,达到了控制简单、体型小、响应快、运行稳定等目标,可应用于4D影院、车辆驾驶模拟、游戏娱乐等平台。
1 六自由度电动缸姿态仿真平台结构设计
1.1 结构设计方案
如图1所示,六自由度电动缸姿态仿真平台采用Stewart并联结构为基础平台,具有控制简单、体型小、载荷分布均匀、响应快、运行稳定等特点。结构设计上主要由上动平台、虎克铰链、电动推杆(折返式电动缸)、下静平台等四部分构成,上动平台与下静平台间通过虎克铰链和6条折返式电动缸连接,折返式电动缸通过伸缩完成六自由度空间运动,从而模拟出逼真的空间运动姿态和体感。

图1 六自由度电动缸姿态仿真平台结构图
1)上动平台为提高刚度及载荷能力,能够承受2 t重物且稳定、不变形。
2)虎克铰连为6条折返式电动缸与上动平台、下静平台的链接枢纽,采用虎克铰链具有角位移大(可达45°)、传递转矩大、传动效率高、噪声小等优势。
3)下静平台为提高刚度及负荷,使用优质钢材焊接,并采用Q235矩形管制作而成,与虎克铰链连接处采用45#钢提高受力强度,下静平台前后各留置一个机箱,分别放置伺服控制系统和电脑主机,机箱围板选用优质冷轧钢板。
4)折返式电动缸的主要技术参数:有效行程为200 mm;丝杆直径×导程为16 mm×5 mm;伺服电机额定转矩为2.39 N·m,最大转矩为8.36 N·m;伺服电机额定转速为3 000 r/min,最高转速为6 000 r/min;电动缸额定速度为250 mm/s,最高速度为500 mm/s;电动缸润滑方式为润滑脂。
1.2 平台尺寸、载荷指标
六自由度电动缸姿态仿真平台设计的外廊尺寸、控制柜尺寸、运动载荷、有效载荷等指标如表1所示。从表1可看出,该六自由度电动缸姿态仿真平台具有载荷大、体型小等特点,可适用于空间相对较小的工作场合。

表1 六自由度电动缸姿态仿真平台尺寸、载荷指标
1.3 平台结构仿真分析
从表2可看出,六自由度电动缸姿态仿真平台的横向、纵向、垂直等位移以及偏航角、俯仰角、翻滚角等角度均符合设计要求,仿真图如图2~图6所示。

表2 六自由度电动缸姿态仿真平台运动参数
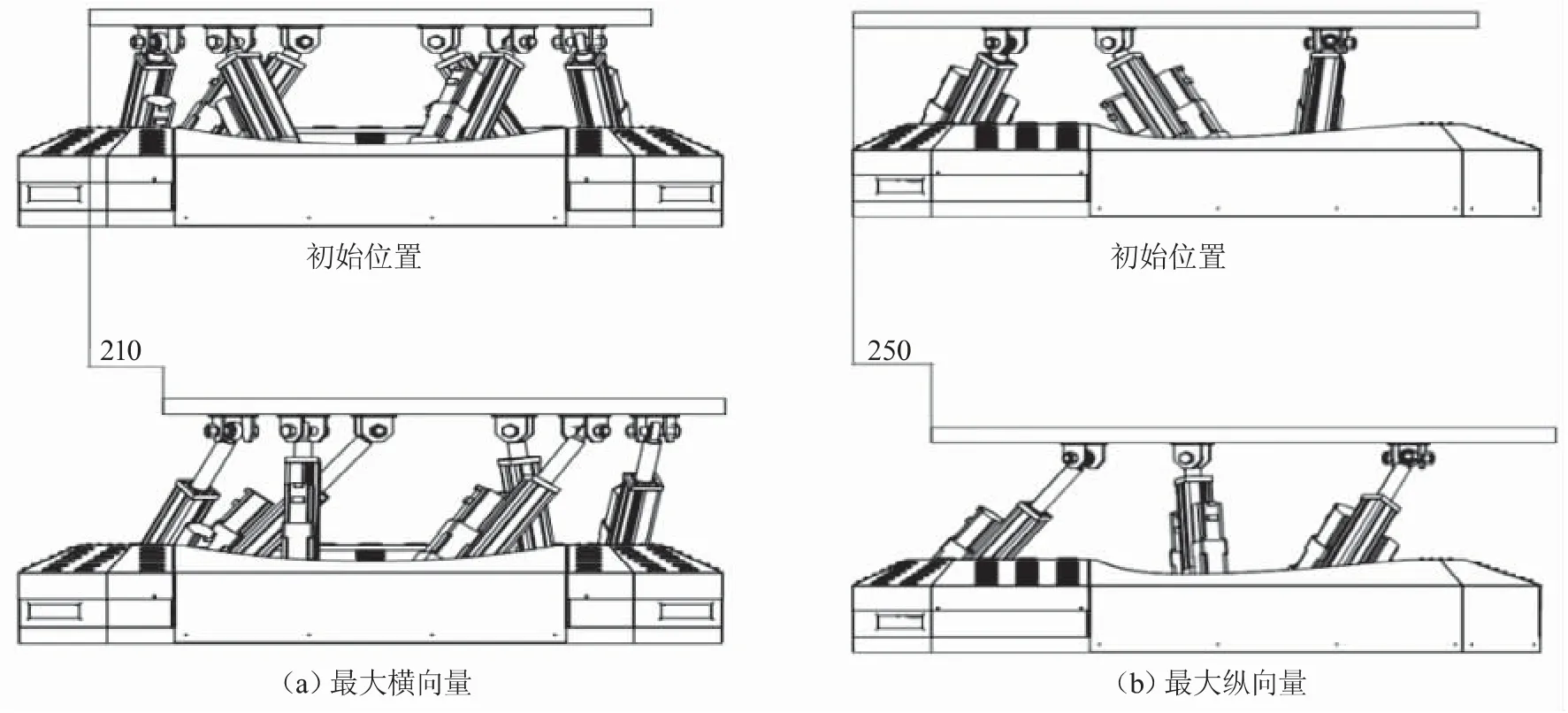
图2 平台横荡、纵荡仿真图
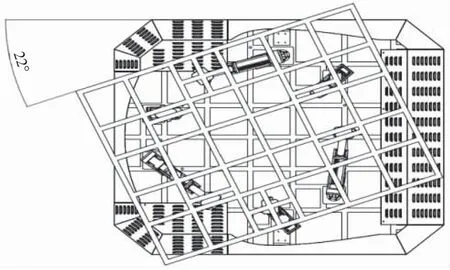
图4 平台偏航角度仿真图

图5 平台俯仰角度仿真图

图6 平台翻滚角度仿真图
2 六自由度电动缸姿态仿真平台控制系统设计
2.1 仿真平台控制系统框架设计
六自由度电动缸姿态仿真平台控制系统分为上位机控制软件、下位机控制系统、网络通信传输接口、运动平台和传感器模块等五个部分,如图7所示。

图7 六自由度电动缸姿态仿真平台控制系统设计整体框架图
1)上位机控制软件含平台控制软件和模拟器软件,其中平台控制软件设置自动控制、手动控制和振动测试3个功能,可获取状态数据并经数据转换后输出在UI界面显示。模拟器软件主要功能为模拟驾驶运行,可获取姿态数据并转换为控制信号传输到平台控制系统。
2)下位机控制系统主要对上位机控制数据进行姿态解算,并将姿态数据转换为伺服控制系统的控制信号,下达控制信号指令折返式电动缸完成相应姿态动作。
3)网络通信传输接口用于对折返式电动缸状态信号及控制信号进行数据传输。
4)运动平台为折返式电动缸根据指令完成相应姿态动作的负载平台。
5)传感器模块用于采集电动缸姿态仿真平台的姿态、振动频率等状态及故障数据,同时将采集到的数据传输到平台控制系统。
2.2 平台运动模式
运动平台可以完成包括单自由度运动、任意自由度组合复合运动、单缸测试、振动测试等多种运行模式。
1)单自由度运动:可以完成任意一个自由度的独立运动,用户可以通过控制软件输入指定角度,平台就会运行到指定角度。
2)复合运动:可以完成任意六个自由度的组合,用户可以通过控制软件输入指定角度与平移量,平台就会运行到指定位置(图8)。
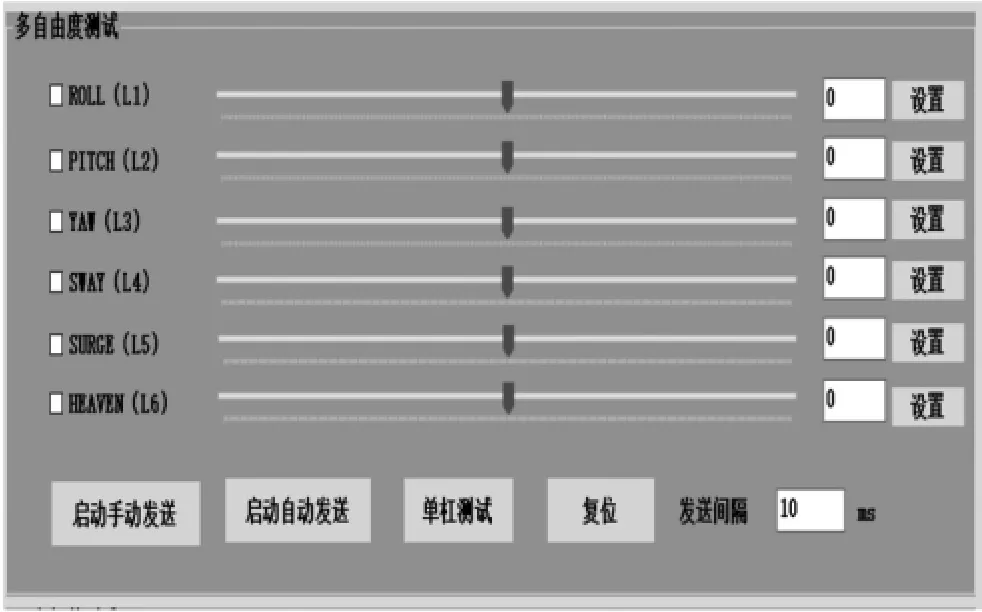
图8 多自由度运动测试
3)单缸测试:可以任意控制平台的电缸进行伸缩运动,用户可以通过控制软件输入指定的伸缩量,指定的电缸就会运行到指定的位置。
4)振动测试:可以让平台以指定的频率进行振动,用户可以通过控制软件输入指定的振动频率与自由度、运动范围,平台会根据设置的参数进行振动测试(图9)。
2.3 运动控制软件设计
1)运动控制软件须实现以下基本功能:(1)系统启动/停止;(2)运动控制;(3)系统的运动状态检测;(4)故障处理及安全保护;(5)手动和自动切换。
2)提供3D可视化平台测试、调试工具及监控软件,实现以下功能:(1)监控平台的工作状态;(2)接收操作人员控制指令;(3)控制系统完成测试任务;(4)为系统提供工作状态显示;(5)设备运行状态显示;(6)实时位置曲线显示;(7)故障状态显示;(8)具备试验数据的存储、记录、统计、处理、输入、输出功能。
3)平台使用Stewart结构,运用Newton_Raphson算法进行平台的正解与反解(图10):(1)通过对平台基本参数的输入,可以基于正解算法对平台的姿态进行解算(图11);(2)通过对平台基本参数的输入,可以基于反解算法对平台进行指定姿态的控制(图12);(3)通过对平台基本参数的输入,可以获取平台的基本参数信息(图13)。

图13 平台基本参数信息
4)通过安装在平台的姿态传感器和位移传感器进行平台姿态数据的采集,可以检测系统的运动状态,通过实时位置曲线显示直接观察平台的实时状态,并存储和记录试验数据。具体包括:(1)平台整体运动状态监控,具备试验数据的存储、记录、输入、输出功能(图14);(2)平台单自由度运动状态监控,具备试验数据的存储、记录、输入、输出功能(图15)。

图14 整体运动状态监控功能
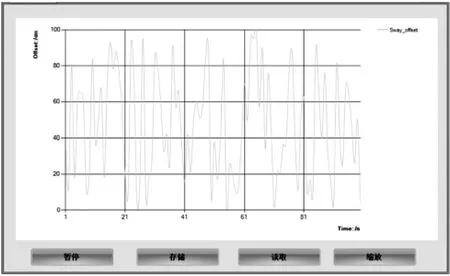
图15 单自由度运动状态监控
5)使用计算机通过网络UDP通信或串口通信可以进行多自由度测试、参数设置、振动测试、3D可视化平台的设置,如图16所示。

图16 多自由度测试、参数设置、振动测试设置图
(1)通过“多自由度测试”窗口可以完成:①手动控制平台完成单个自由度或多个自由度的联合运动;②自动控制平台完成单个自由度或多个自由度的联合运动;③独立控制任意一根电缸的伸缩运动。
(2)通过“参数设置”窗口可以完成:①平台电机的转速控制;②平台的顺滑程度控制;③平台的响应速率控制;④平台联合运动时各自由度所占比重的控制。
(3)通过“振动测试”窗口可以完成六个自由度指定“运动范围”和“振动频率”的独立或联合运动的振动测试。
(4)通过“3D可视化平台”窗口的3D平台模型可以直观地观察平台状态,也可通过控制3D模型直接控制平台运动。
6)通过安装在平台的振动传感器进行平台振动数据采集,可以将平台的振动信息转换成数字化的振动频谱曲线,便于实时观察平台的状态,也可进行振动数据的存储与处理。
7)故障报警系统用于实时对平台的运行状态进行检测,如平台出现报警,则显示平台的故障代码、处理方式,可以通过该窗口对平台进行启动、复位、清除错误等操作。
2.4 平台的安全性设计
平台的安全性设计包括以下7个功能:
1)设计立足于提高平台自身的稳定性,下平台尺寸与模拟座舱一致,同时使用加厚钢管以及将控制机柜放置于下平台的方式增加下平台的重量,增加下平台与模拟座舱的比重,这样设备只须使用橡胶脚垫即可,避免了在现场安装时打地基、加固地面等操作。
2)平台伺服运动系统具有动态锁定功能和安全锁定功能。
3)平台具备保护电气系统在异常条件下安全的功能,包括过程保护、过载保护和防撞击损坏保护。
4)平台具备断电原位自动锁定功能。
5)平台电动缸具备极限保护、极限防撞击措施,各电动缸伺服电机驱动器具有电流扭矩过载、位置偏差大、数据总线故障、电源欠压、编码器故障等保护功能;配电柜配置漏电保护断路器,保护人身安全。
6)平台配备4个急停开关,位于模拟座舱、运动平台及综合控制台,针对紧急情况可快速响应,保护人身安全。
7)平台现场安装时,底板上有吊环,便于运输起吊。
3 结束语
随着工业技术创新的不断发展以及虚拟现实技术应用领域的不断拓展,六自由度运动平台的市场应用前景愈加广阔。
本文自主设计的六自由度电动缸姿态仿真平台,以Stewart并联结构为基础平台,以上动平台、虎克铰链、电动推杆(折返式电动缸)、下静平台等为结构组成,经平台结构仿真测试分析符合设计要求,具有控制简单、体型小、载荷分布均匀、响应快、运行稳定等特点,可适用于4D影院、车辆驾驶模拟、游戏娱乐等空间相对较小的工作场合,为使用者模拟出逼真的空间运动姿态和体感。同时,设计开发了六自由度电动缸姿态仿真平台控制系统,能实现单自由度运动、任意自由度组合复合运动、单缸测试、振动测试等多种运行模式。
猜你喜欢
科学大众(2023年17期)2023-10-26 07:39:14
小读者(2021年2期)2021-03-29 05:03:20
天天爱科学(2020年6期)2020-09-10 07:22:44
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年10期)2018-11-06 07:05:28
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
数学物理学报(2017年6期)2018-01-22 02:26:40
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52