
基于嵌入式系统的船用阀门控制系统设计
2023-12-09 02:55秦磊,刘勇,赵阳
电子设计工程 2023年23期
秦 磊,刘 勇,赵 阳
(泰州市人民医院,江苏泰州 225300)
在当今时代,工业智能化迅速发展,船舶领域的规范也得到相应提高,尤其是在大力发展海洋经济、坚决维护海洋权益、加快建设海洋强国,打造现代化海洋经济的新征程过程中,船舶工业的发展必然会经历舒适化、自动化、智能化的阶段[1-2]。船舶阀门智能遥控系统主要用于监控船舶各系统上的阀门状态信息[3]。嵌入式系统的引进,是实现船舶智能远程控制的重要手段,主动下达指令远程遥控阀门开关角度,实时采集各阀门上的重要参数,友好地为船舶人员提供辅助决策信息,提高工作效率,增强安全程度[4-6]。文中从软硬件角度出发,详细地介绍了核心电路模块的设计原理以及软件流程的编程思路。
1 系统的整体硬件设计方案
硬件电路是整个控制系统稳定运行的关键,是软件功能实现的基础。主控MCU 选取基于ARM Cortex-M3 为内核的微处理器STM32F107VCT6[7]。PC 机作为上位机与主控板通过RS485 进行通信,设计利用各类传感器电路获取船舶阀门的主要监测参数(角度、电流、温度和湿度),开关控制阀门的启动与急停等功能,DA 模块输出信号驱动电机转动。系统硬件设计方案如图1 所示。

图1 系统硬件设计方案
1.1 电源模块设计
电源模块设计电路如图2 所示,P12 接线端是电压输入端,选用一定参数的开关电源得到输出侧的5 V 电压,U15 为电平转换芯片AMS1117,将5 V 电压转换为STM32 工作电压3.3 V,并在AMS1117 输入与接地端并联0.1 μF 贴片电容和100 μF 极性电容,起到滤除高低频信号干扰的作用。为MCU 提供更加稳定的工作电压,在AMS1117 输出侧并联22 μF 短电容,并起滤波作用。
电源隔离电路如图3 所示。为保障系统稳定工作,减少模拟量与数字量信号的相互干扰,选用10 μH小电感与0 Ω小电阻来进行隔离模拟电源A3.3 V 与数字电源D3.3 V、模拟地AGND与数字地DGND3.3 V以及参考电源VREF 之间的隔离。
1.2 CAN通信电路设计
因被控阀门的数量不唯一以及不确定性,为此设计了一个主控制板与多个子控制板的CAN 总线通信。子控制板的数量根据船舶所需遥控阀门的数量而定,具有一定的可扩展性,其每个阀门的ID 在设计时选用拨码开关来设定,以达到每个阀门的单独控制。CAN 通信的设计直接影响到整个通信网络的可靠性与安全性[8-9]。采用ADI 公司的双通道数字隔离器ADUM1201 来实现电气隔离。ADUM1201 具有性能强、功耗低、速度快及体积小等优点。D3.3 V与CAN3.3 V 是两组完全隔离的不共地的电源,抑制了共模电压的产生,增强了通信系统的稳定性。选取VP230 作为CAN 通信驱动芯片,分别在其两路输出端接入100 Ω的电阻,匹配总线阻抗,提高数据通信的可靠性。CAN 高电平、CAN 低电平与地之间分别并联30 pF 的电容,滤除高频干扰信号,防止电磁辐射,提高接口电路的抗干扰能力[10]。CAN 通信电路设计如图4 所示。

图4 CAN通信电路
1.3 电机互锁模块设计
为避免电机正反转同时接通,造成短路的严重后果,正反转的接触器只能有一个处于吸合状态。通过硬件电路设计并结合软件处理的方式来控制电机的运行方向,电机互锁硬件电路如图5 所示。DC1和DC2 端连接STM32 的GPIO 口,通过GPIO 两个口的高低电平信号来进行软件互锁,实现电机的正反向运行,利用定时器中断配置PWR 的占空比来控制速度。当DC1 输入高电平,DC2 输入低电平时,电机正向运行;反之,电机反向运行。T3 和T4 为瞬态抑制二极管器件,起到过压保护作用并具有响应极快与浪涌吸收能力强的优点。

图5 电机互锁硬件电路
1.4 模拟量采集模块设计
1.4.1 角度与电流采集
船用阀门的角度与电流是两个重要的参数,采集电路如图6 所示。针对这两路信号的采集,文中选用LM358 运放芯片,在其内部便可完成信号放大供STM32 I/O 口采集。图中P9 接线端子提供了角度信号的输入口供角度传感器引线接入使用,角度传感器选用米兰特P2020 系列,实现0~360°高精度测量。输入电压5~24 V DC,输出信号DC 4~20 mA,0~10 V。P10 接线端子提供了电流信号的输入口供电流传感器引线接入使用,电流变送器的参数为输入电流AC 0~30 A;输出信号DC 4~20 mA,0~10 V;孔径8 mm。该两路模拟信号最终通过STM32 微处理器的I/O 口来采集并通过一定的软件算法得出可靠的值,在下文软件设计中有详细描述。
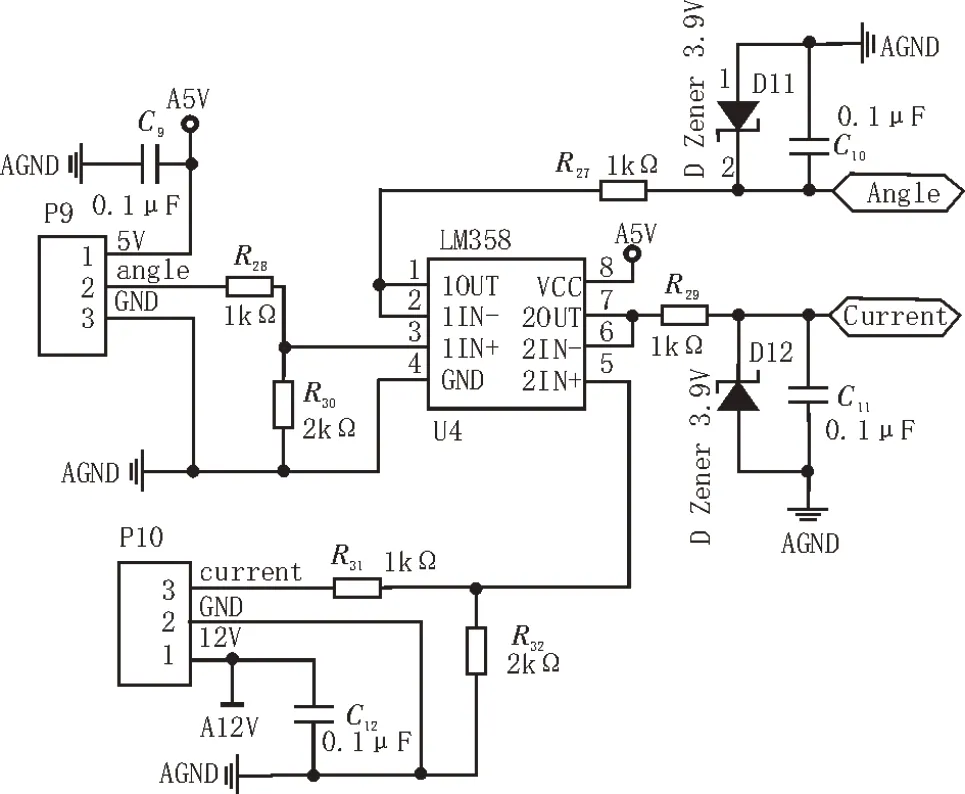
图6 角度与电流采集电流图
1.4.2 温度采集
文中选用DS18B20 温度传感器作为温度信号采集源,工作电路如图7 所示。主要特性:3.0~5.5 V 的宽适应电压范围,与微处理器通信仅需一根单线,转换电路和传感元件都已集成在内部,被测温度范围广,分辨率最高可达12 bit。DS18B20 具有响应速度快、体积小、精度高、稳定性高等优点。通过传感器的DQ 端连接STM32 微处理器的I/O 口来实现温度的实时监控[11-13]。
1.4.3 湿度采集
文中选用DHT11 湿度传感器作为湿度信号采集源,工作电路如图8 所示。主要特性:3~5.5 V 的工作电压范围,最大2.5 mA 的供电电流,湿度范围:20%~90%RH,误差为±5%RH,测量分辨率为8 bit。DHT11 具有信号传输距离长、响应速度快、抗干扰能力强、性价比高等优点。VCC 与GND 间接入0.1 μF的电容,可以起到去耦滤波的作用。在短于20 m 的连接线间接有R34上拉电阻,阻值为4.7 kΩ。独特的单线接口使其允许通过传感器的DATA 端直连STM32 微处理器的I/O 口来实现温度的实时监控。
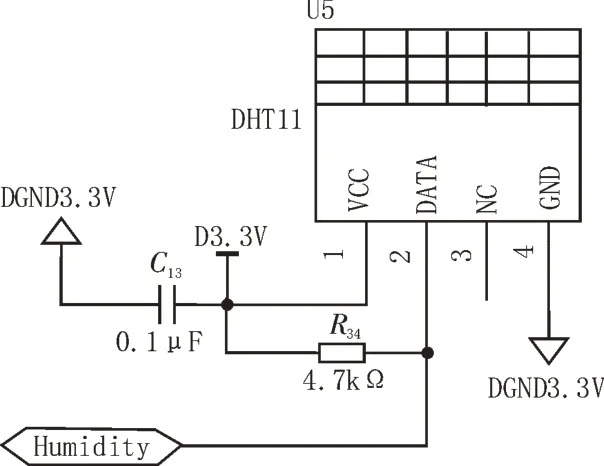
图8 湿度采集电路
1.5 系统的硬件实例展示
根据阀门的实际构造情况,充分利用剩余空间针对性地进行系统整体的硬件设计以及各器件的选型等,通过嵌入的方式有效地解决空间资源问题并能够近距离准确地采集到各环境变量。整个阀门的硬件结构实物展示如图9 所示。
2 控制系统的软件设计
系统软件主要分为三部分:系统相关模块、外设硬件模块和用户模块。每个模块下又细分各子模块,完成独自的功能。采用这种结构使得整个系统分层的结构非常清晰;每个模块之间相互独立、内敛性强、相互耦合性差;用户软件模块与底层模块分离,便于移植、维护等。这些要求均是一个成熟的、完善的软件结构架构的基本要求,应予以保证。系统软件的总体架构如图10 所示。
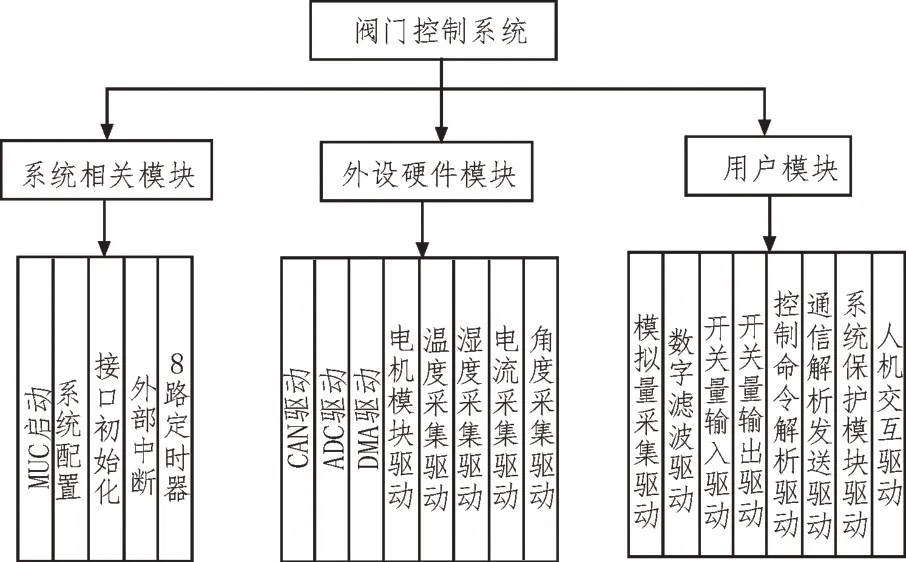
图10 控制系统软件的总体架构
2.1 模拟量采集模块软件设计
2.1.1 角度与电流采集原理
阀门的实时角度与电流是系统的重要参数,由相应的传感器检测并转换为4~20 mA 信号供STM32 F107VCT6 采集。在软件编程中将STM32F107VCT6的ADC 配置为自动连续循环扫描模式,分别由ADC1 的通道2 和通道10 采集角度与电流。
DMA 是用来作为外设和存储区之间数据交互的传输模式,且由MCU 自动执行无需额外的控制。文中需要采集2 路模拟量,为提高数据质量每路模拟量均需采集10 次并进行数字滤波。模拟量转换和存储的示意图如图11 所示。
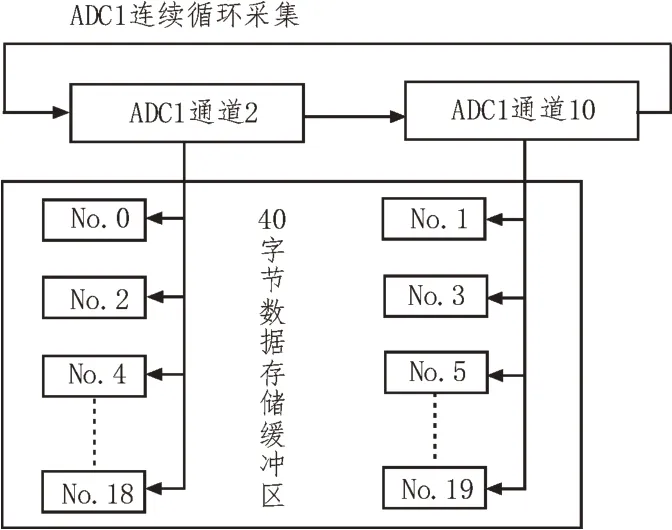
图11 ADC1采集模拟量转换和存储示意图
2.1.2 角度与电流采集流程设计
利用定时器中断,每隔一个自定义周期便处理采集模拟量值。两路模拟量经过ADC 转换后循环存储到存储区(循环覆盖的方式,即当存储完一轮20个数据后继续从第一个数据存储区开始覆盖,这样便保证任何一个时刻读取到的20 个数据均是最新的ADC 采集数据)。在对采集的数据采取数字滤除前,采用快速原理排序算法对数组进行整理并重排顺序。采集流程如图12 所示。
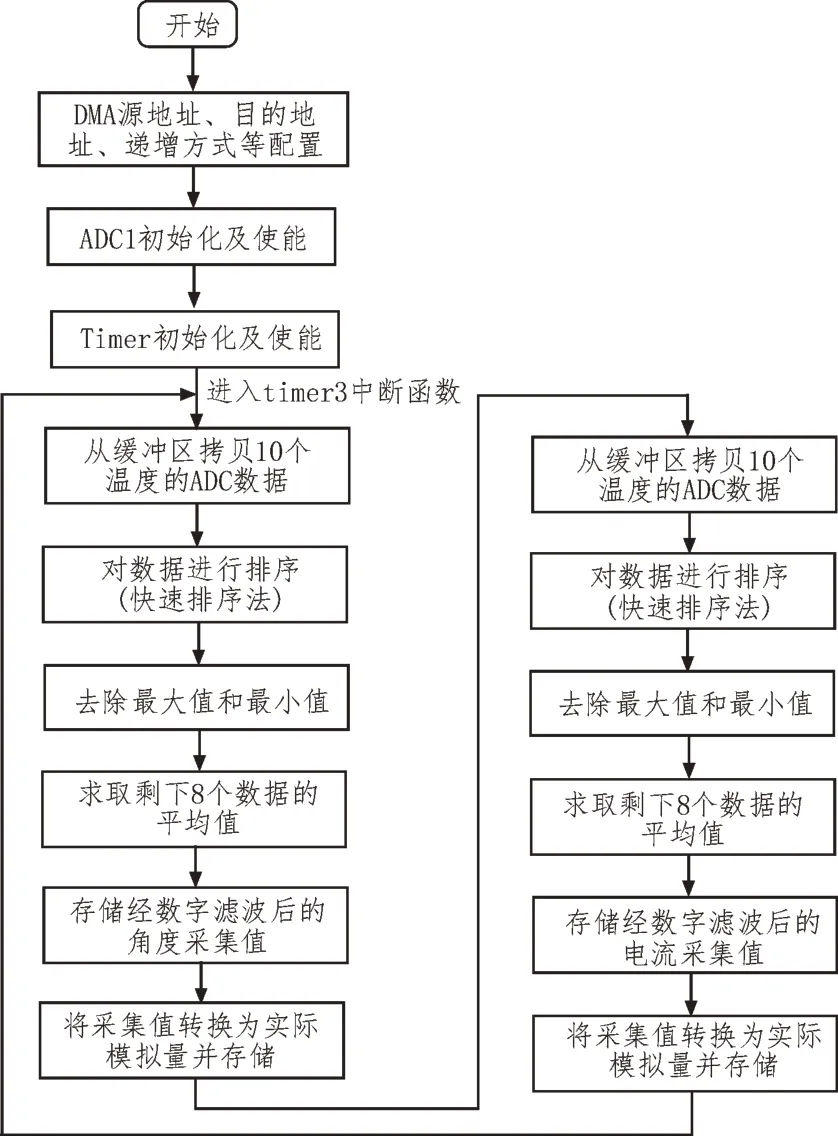
图12 角度与电流的采集流程
2.2 智能阀门控制器操作界面
上位机系统使用Visual Basic6.0 实现智能阀门控制的设计,Visual Basic6.0 是一种基于Basic 的可视化程序设计软件,适用于图形用户界面的开发。其界面设计简单易实现,利用软件自带的编辑控件选取自适用的控件并定义各自的控制变量,设置串行通信对象以实现船用阀门的重要参数的显示和设定。操作界面如图13 所示。

图13 智能阀门控制界面
2.3 智能阀门控制器通信协议
参考Modbus RTU 通信协议,根据实际情况自定义了智能阀门控制器通信协议,以满足个性化的通信要求[14-16]。在软件编程时考虑到上位机与下位机的通信需求,分别设计了对应的码值所代表的含义。具体的数据帧格式如表1 所示。
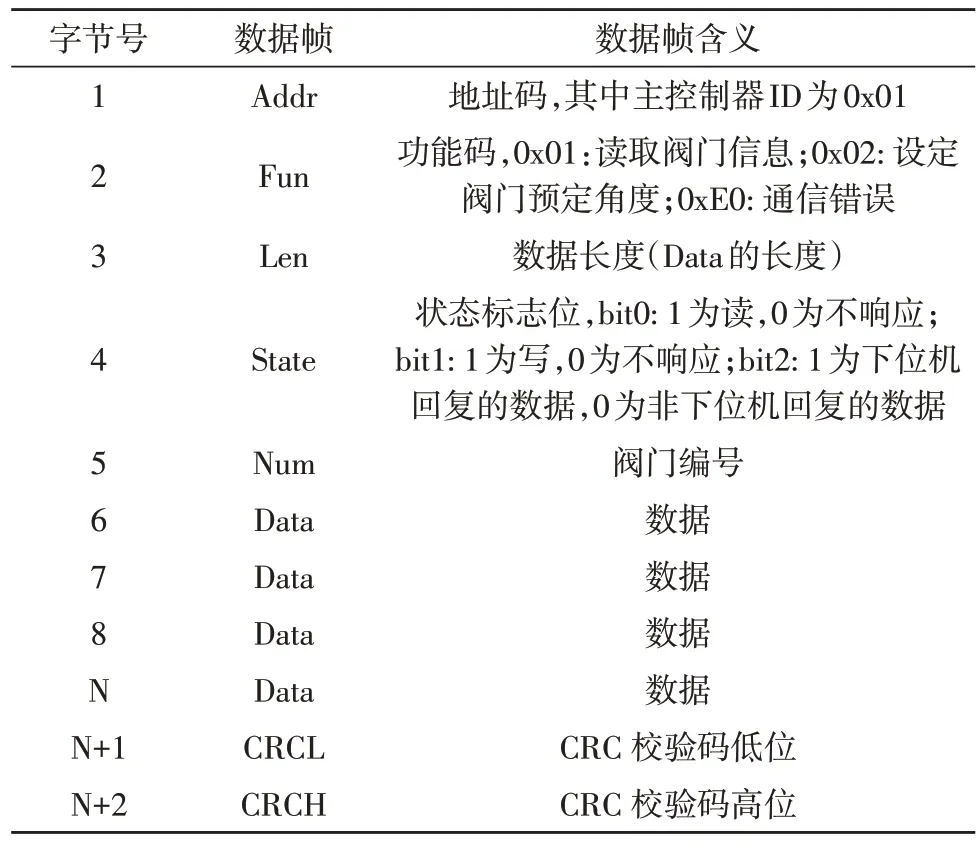
表1 智能阀门控制器通信协议
3 结束语
文中详细地介绍了基于嵌入式技术的智能阀门控制系统研发的各个环节技术。从整体方案设计到各个硬件模块设计、软件结构设计以及嵌入式操作系统移植和上位机操作界面开发。每一个设计模块均详细地介绍了理论依据和设计思路。利用以ARM 为核心的嵌入式硬件系统设计方案克服了传统阀门的缺点,监控了各阀门的状态信息,实现了船用阀门控制的智能化,极大地提高了船舶自动化程度。可为该领域的相关研究提供参考价值。
猜你喜欢
流程工业(2022年3期)2022-06-23
作文小学高年级(2022年3期)2022-04-20
煤气与热力(2021年3期)2021-06-09
福建中学数学(2018年1期)2018-11-29
测控技术(2018年12期)2018-11-25
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
电子制作(2016年21期)2016-05-17
电测与仪表(2015年11期)2015-04-09
中学科技(2014年11期)2014-12-25
