
变电站水冲洗机器人运动控制研究
2023-12-09 02:55李志鹏鲁守银于世伟张强姜哲
电子设计工程 2023年23期
李志鹏,鲁守银,于世伟,张强,姜哲
(山东建筑大学信息与电气工程学院,山东济南 250101)
当今社会的高速发展离不开供电系统的稳定运行,而变电站作为供电系统的重要纽带,承担着电力能源分配与输送的责任[1]。变电站电网输变电设备绝缘子在运行工作中长期暴露在室外环境下,由于受到强电场和恶劣自然环境的影响,绝缘子的表层堆积了大量污染物形成污秽,很容易产生污闪现象[2],导致供电系统无法正常运转。因此,需要对变电站输变电设备表层的污染物进行定期处理[3]。目前,对绝缘子清理的方法主要是采取定期清洗绝缘子,人工水冲洗作业存在自动化水平低、劳动强度大、危险性高等缺点[4]。所以采用机器人完成绝缘子清洗工作是十分有必要的[5]。
该文首先对水冲洗机器人的结构设计进行了描述,建立了水冲洗机器人数学模型,并引入视觉定位确定目标绝缘子位置信息,将基于位置的视觉伺服控制方法与模糊自适应PID 控制算法相结合,完成对水冲洗机器人的轨迹跟踪控制。最后通过Simulink进行机械臂轨迹跟踪仿真实验,实验结果验证了所提方案的可行性。
1 水冲洗机器人结构及数学模型
1.1 水冲洗机器人结构设计
该文主要以如图1 所示的水冲洗机器人为研究对象,其主要由移动底盘平台和五自由度机械臂组成。移动底盘平台主要实现水冲洗机器人在变电站环境中的运动,移动底盘平台采用履带式结构设计,能够通过电缆沟与沟道等道路[6],具有较强的灵活性和稳定性,并完成靠近工作目标的任务。五自由度机械臂安装在移动底盘平台上方,采用RRPRR 关节结构,并在机械臂末端安装视觉传感器与水枪机构,用以实现对绝缘子的识别定位与清洗。
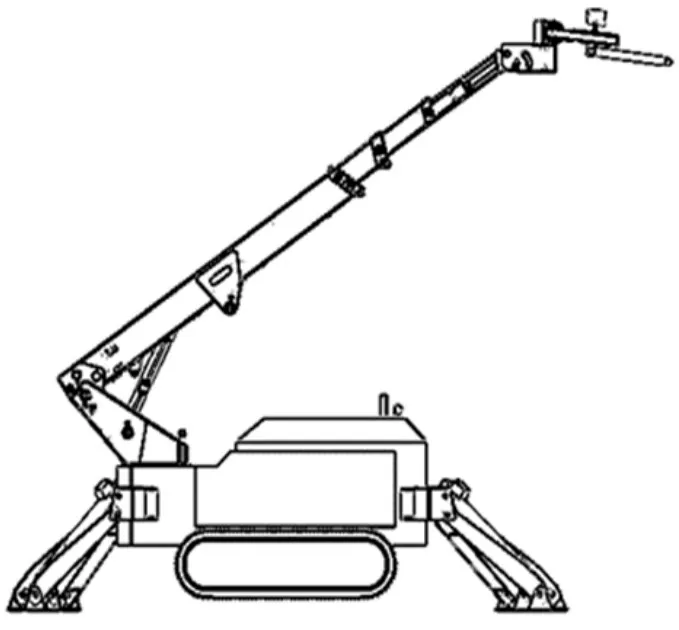
图1 水冲洗机器人结构示意图
1.2 机械臂运动学分析
该文设计的机械臂包括五个自由度,分别由腰部旋转、大臂俯仰、小臂伸缩、水枪平台俯仰与摇摆构成。通过改进型D-H 法[7-9]建立如图2 所示的连杆坐标系,以机械臂底座的旋转中心为基坐标原点,并以各自由度关节作为关节坐标系原点,旋转轴为Z轴方向,沿移动底盘正向方向为X轴建立坐标系。机械臂D-H 参数值如表1 所示。

表1 机械臂D-H参数值
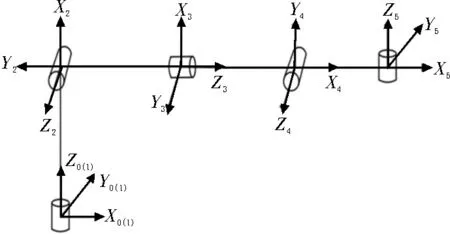
图2 机械臂连杆坐标系
根据D-H 参数法,可利用矩阵变换的方法获取两相邻坐标系{i-1}与{i}的转换关系,其变换公式如式(1)所示:
式中,cθi=cosθi、sθi=sinθi、cαi-1=cosαi-1、sαi-1=sinαi-1。
因此,机械臂末端水枪坐标系相对于移动底盘平台的基坐标系的总变换矩阵为:
因此,给定机械臂各关节变量,即可确定出机械臂末端水枪坐标系相对于移动底盘平台的基坐标系的变换矩阵,即可确定机械臂末端水枪的位姿。
可将式(2)写为:
,求解机械臂各关节角度的值,该文利用解析法,给式(3)两边同时左乘未知的关节角度,分离出各个角度值,从而计算出各关节角度值[10]。
2 视觉伺服控制
2.1 视觉目标定位
根据水冲洗机器人视觉伺服控制的工作过程,首先需要确定目标绝缘子的位置信息,该文采用基于双目视觉的目标定位,并将已标定好的双目相机安装在机械臂末端。
双目视觉定位利用双目视差的原理[11],其模型如图3 所示,相机焦距为f,左右相机光心距离(基线距离)为B,目标点P(xc,yc,zc)在左右图像平面上对应的坐标位置分别为:
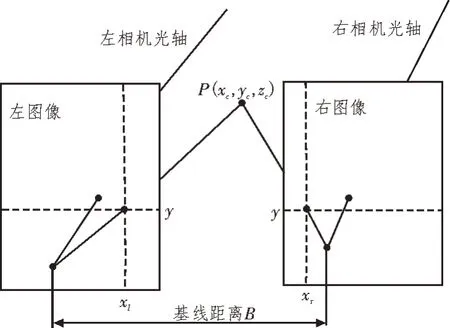
图3 双目定位视觉模型
且左右两相机位于同一平面,则图像坐标y=yl=yr,由三角相似几何关系得:
则D=xl-xr为视差,因此能够得出目标点P在相机坐标系下的位置信息为:
因此,已知目标绝缘子的三维坐标,通过上述运动学分析,即可将其转换到机械臂坐标系中,进而用于机械臂运动伺服控制。
2.2 视觉伺服系统
如图4 所示,水冲洗机器人视觉伺服系统采用双闭环控制结构,该系统中相机的位置使用了眼在手上的方式,也就是将相机安装在机械臂末端进行图像采集,完成绝缘子的检测,并通过上位机计算出目标绝缘子的位置信息,经过坐标转换得出其在机械臂坐标中的位置,利用逆运动学分析得出机械臂各关节的角度信息,并采用模糊自适应PID 的视觉伺服算法实现水冲洗机器人对绝缘子的瞄准。

图4 视觉伺服系统结构
3 模糊自适应PID伺服控制算法
3.1 传统PID控制方法
在工业过程中PID 控制作为采用最普遍的控制方法,具有结构简单、适应性强、鲁棒性好等特点[12]。传统PID 控制算法表达式如下:
式中,u(t)为控制输出信号;e(t)为当前误差信号;Kp、Ti、Td分别为比例系数、积分时间常数、微分时间常数。
PID 控制虽然能够达到良好的控制精度,但由于传统PID 控制中Kp、Ki、Kd三个系数恒定,控制效果很难达到理想状态。而通过模糊控制能对PID的系数进行补偿,提高了控制系统的自整定能力,实现了PID 系数的在线自整定[13]。
3.2 模糊自适应PID控制方法
模糊控制是建立在专家经验之上的,利用专家经验进行模糊规则的设计,并将输入量进行模糊化处理,将其作为模糊规则的输入,经过模糊推理得到控制量[14]。该文将模糊控制与传统PID 控制相结合,形成参数自调整的模糊自适应PID 控制,将其用于实现水冲洗机器人轨迹跟踪控制,将角位移误差e和误差变化率ec设置为水冲洗机器人模糊控制器的输入,并将ΔKp、ΔKi、ΔKd作为其输出,完成对PID系数的自整定,提高了系统的自适应性。
模糊自适应PID 控制器参数定义如下:
式中,Kp(0)、Ki(0)、Kd(0)分别代表PID 控制器的初始值,ΔKp、ΔKi、ΔKd分别代表模糊控制器的输出值。
模糊自适应PID 控制框图如图5 所示,首先借助隶属函数对模糊控制器的输入与输出进行模糊化处理,并设置模糊集合。设计控制误差e与误差变化率ec的论域为[-3,3],输出ΔKp、ΔKi、ΔKd的论域为[-1,1]。

图5 模糊自适应PID控制框图
通过模糊推理,e和ec确定了三个模糊输出参数,因此还需要将输出参数进行清晰化处理。该文采取面积重心法完成反模糊化处理[15],其表达式如下:
式中,vi表示模糊变量值,u(vi)表示隶属函数。
4 仿真实验
该文采用Simulink/Simscape.Multibody 对模糊PID 控制器进行仿真实验,首先,通过Solidworks 中的Simscape.Multibody 插件将水冲洗机器人三维模型导入到Simulink 环境中[16],并将通过视觉定位获得的各关节的期望角度作为模糊PID 控制器的输入,实现水冲洗机器人的位置控制,并对水冲洗机器人实现可视化仿真。如图6 所示为水冲洗机器人运动状态分析,图6(a)为初始状态,图6(b)为瞄准状态。

图6 运动状态分析
以大臂俯仰关节为例,为验证两种控制方式在水冲洗机器人瞄准绝缘子过程中能否快速作出响应,完成冲洗任务。该文将阶跃信号作为控制器的输入,大臂关节阶跃信号的响应曲线如图7 所示,从图中可以看出,模糊自适应PID 算法相较于传统PID算法,超调量下降了15%,而调节时间减少了0.7 s。由此可见,模糊自适应PID 算法能降低系统的超调量,并缩短水冲洗机器人瞄准绝缘子过程中的调节时间,更加快速地到达稳定输出,有效提高了水冲洗机器人的响应速度。
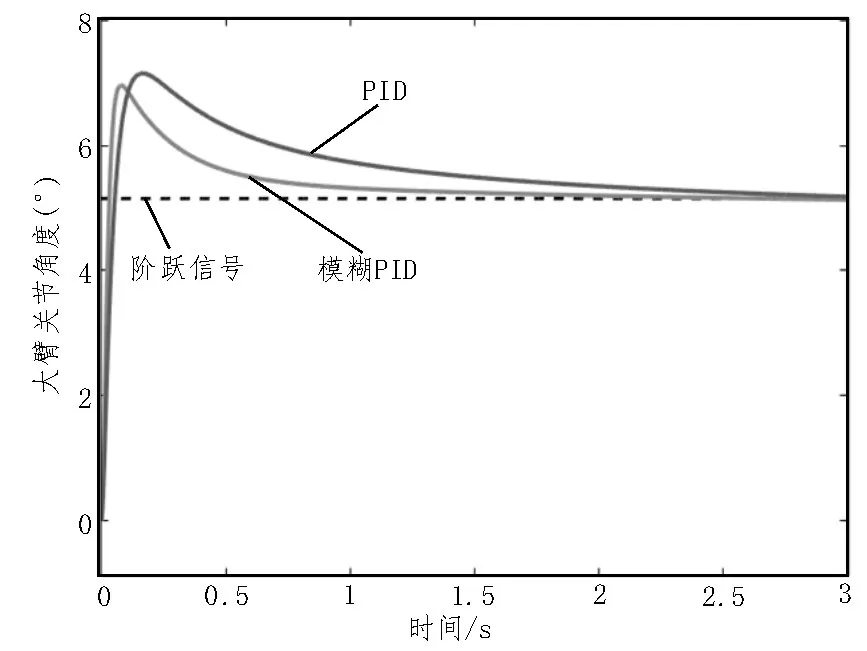
图7 大臂关节阶跃信号响应曲线
为验证水冲洗机器人能否准确跟踪期望轨迹,该文将关节运动期望轨迹设置为正弦曲线,将其作为控制系统的输入信号,分别采用PID 算法与模糊自适应PID 算法对轨迹跟踪效果进行仿真分析。大臂俯仰关节的期望运动轨迹与通过不同控制器的实际运动轨迹如图8 所示。仿真结果表明,通过PID 控制器虽然能够完成对期望轨迹的跟踪,但在期望轨迹的拐点处轨迹跟踪不够准确。使用模糊PID 控制器在期望轨迹拐点处能更好贴合期望轨迹,误差较小,避免了PID 算法在轨迹拐点处出现超调的现象。因此,模糊自适应PID 算法相比于传统PID 算法能够更加迅速和准确地跟踪到期望轨迹。
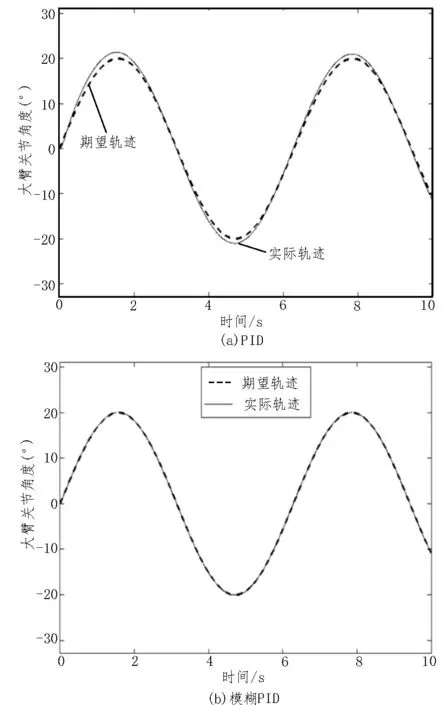
图8 大臂关节跟踪轨迹
5 结论
该文以自行研制的水冲洗机器人为基础,建立了该机器人的数学模型,并采用了双闭环的视觉伺服系统,为提高水冲洗机器人瞄准绝缘子过程中的稳定性,提出将基于位置的视觉伺服控制方法与模糊自适应PID 控制算法相结合的运动控制策略,并通过模糊PID 控制器,实现了PID 系数的自整定。通过仿真实验结果证明,模糊自适应PID 算法能有效缩短水冲洗机器人的调节时间,提高响应速度。在期望轨迹跟踪过程中,具有抗干扰能力高、动态性能好、超调量小等优点,因此,采用模糊自适应PID 算法作为五自由度机械臂控制方式,满足水冲洗机器人在瞄准绝缘子过程中对响应速度与跟踪精度的需求,能有效地完成对变电站绝缘子的瞄准与冲洗作业。
猜你喜欢
中老年保健(2021年11期)2021-08-22
世界睡眠医学杂志(2019年3期)2019-04-26
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
安徽医科大学学报(2016年12期)2017-01-15
电力建设(2015年2期)2015-07-12
西南军医(2015年1期)2015-01-22
电测与仪表(2014年6期)2014-04-04
电气传动自动化(2014年6期)2014-03-20
