
一种无水干式太阳能板清洁机器人的设计
2023-12-09 02:45李佳乐向旭宏廖力达刚琳俐朱颜宁陈慧琳陈秀竹
机械工程师 2023年11期
李佳乐,向旭宏,廖力达,刚琳俐,朱颜宁,陈慧琳,陈秀竹
(长沙理工大学a.汽车与机械工程学院;b.能源与动力工程学院,长沙 410114)
0 引言
目前光伏发电行业已发展到较为庞大的规模。太阳能发电是采用光-热-电的形式来进行光电转换,即通过晶体硅材料对太阳辐射进行吸收和转换。在太阳能的利用过程中,光电转换效率是太阳能利用的重要指标。而电池板表面的积灰会影响太阳能板对光辐射的吸收,从而影响光电转换效率。由于太阳能发电站一般建设在人烟稀少的偏远地区,甚至于自然环境恶劣的沙漠地区。因此,太阳能板的清洁问题演变成一个新的研究课题。
光伏电站的太阳能板清洁方式主要包括人工清洗、机械化清洗车清洗和智能太阳能板清洁机器人清洗。人工清洗太阳能板不仅浪费水资源,而且自动化程度较低,需要大量的人工成本;机械化清洗车清洗虽然自动化程度较高,但车型的体积较大移动不方便,且清洗时易造成光伏板损坏。基于这些缺陷,采用太阳能板清洁机器人清洗光伏板,能够有效解决人工清理效率低、成本高、效果差等诸多问题,因而太阳能板清洗机器人受到了国内外企业的重点关注。以色列某企业设计了一款可实现智能化清扫的太阳能板清洁机器人,其主要原理是鼓风机与一个特殊的毛刷相互配合,能够清扫太阳能板积灰面积的99%[1]。日本某公司研发了一款基于最优路径的太阳能组件表面行走清扫机器人,其主要原理是通过设计最优路径实现在太阳能组件表面无死角行走,并使清洁剂和清扫刷相互配合对太阳能板表面污渍进行清扫[2]。上海某公司推出了一款新型的太阳能板清洁机器人,其本体结构由吸盘与伸缩杆构成,其工作原理为依靠内部首尾相连的一枚伸缩杆进行往复式运动[3]。新疆某光伏公司设计了一款智能太阳能板清洁机器人采用上下两端横跨光伏板的形式对光伏阵列表面的积灰进行清扫[4]。
现有的太阳能板清洁机器人的普及性还不高。究其原因是清洗机器人的移动范围、清洗效率和灵活性等的设计还未满足光伏电站实际清洗的要求。因此本文设计实现了一款具有移动范围广、体型小、清洗成本低和效率高的无水干式太阳能板清洁机器人,能够缩短作业人员的工作时间和改善其工作环境,较大程度上降低了人力和物力成本,对提升光伏电站的总发电效益起到重要作用。
1 太阳能板清洁机器人吸附受力分析
真空吸附是实现太阳能板清洁机器人在光伏板上移动作业的关键技术。太阳能板清洁机器人吸附原理是利用内部螺旋桨推压的负压吸附,采用螺旋桨旋转将负压腔内的空气抽出,从而产生负压来吸附,利用螺旋桨旋转产生的推力将机器人贴附在倾斜的太阳能板上,以进行前后左右的移动和完成较为完整的清洁作业。清洁机器人底部与太阳能板完全贴合形成密封,由吸盘内外压强差决定的真空吸附力FΔp随之产生,即
式中:Δp为壳体内外大气压之差(真空度),S为风扇的回转面积。
清洗刷要保证对壁面进行有效地清洗,就必须具有一定的清洗力Fr,清洗刷与壁面间的摩擦力Fs,即:
式中:μs为清洗刷与壁面之间的摩擦因数,FΔ1为清洗刷形成清洗力所需要的压力,k1为清洗刷的弹性刚度,Δ1为清洗刷的弹性变形。
支撑机构主要是麦克纳姆轮,以确保机器人在斜面上运行稳定,麦克纳姆轮的弹性力FΔ2和摩擦力Fd可表示为:
式中:μd为麦克纳姆轮与太阳能板间的滑动摩擦因数,FΔ2为麦克纳姆轮所受到的压力,k2为麦克纳姆轮的弹性刚度,Δ2为麦克纳姆轮的弹性变形。
将清洗刷及麦克纳姆轮所受到的压力总和称为本体压力F。它们与太阳能板之间的摩擦因数为本体摩擦因数μ,由受力平衡可知:
式中:G为清洁机器人的重力,α为太阳能板与水平面之间的夹角。
以上表明清洁机器人清洗刷的压力、支撑力均由FΔ1、FΔ2提供,综上所述,可得:
2 太阳能板清洁机器人总体结构设计
2.1 太阳能板清洁机器人结构型式
太阳能板清洁机器人是无水干式设计,依靠螺旋桨产生负压吸附,麦克纳姆轮全方位转向以及滚刷旋转清洁,即可实现清洁机器人在太阳能板上平稳行驶和无水清洁的功能。太阳能板清洁机器人的整体结构如图1和图2所示。

图1 太阳能板清洁机器人正视结构图

图2 太阳能板清洁机器人俯视结构图
2.2 太阳能板清洁机器人移动方式设计
太阳能板清洁机器人移动方式设计包括车轮结构和清洁路径的设计。一是实现太阳能电池板清洁机器人能够在太阳能板上吸附移动,在到达电池板末端时自动返回;二是清洁机器人应具有一定的爬坡能力。
太阳能板清洁机器人的滚轮采用麦克纳姆轮结构,其由两个半麦克纳姆轮组合,每个半麦克纳姆轮上装有6个辊子,两个半麦克纳姆轮之间的辊子采用间隔布置。麦克纳姆轮可实现清洁机器人横向、竖向和斜向行驶。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。为保证清洁机器人能在一定坡度的太阳能板上移动并且不损伤太阳能板,在动力系统中主要由大转矩直流电动机带动麦克纳姆轮转向,并且实现了45°坡度的爬坡能力。
2.3 太阳能板清洁机器人清洁装置设计
清洁装置由滚刷、底部环式抹布和集尘箱等部分组成。为了达到高效清洁的目的,滚刷选取纤维软绒材质。清洁机器人清洁过程是利用装在装置前方的滚刷进行初步清扫,将易清扫的灰尘消除,再利用螺旋桨产生的负压,在吸尘口处将所清扫的灰尘吸进集尘箱完成集尘,最后利用底部的抹布对太阳能板进行二次清洁,既保证了清洁效率,又实现了无水自动清洁的功能。
2.4 太阳能板清洁机器人控制系统设计
为了便于控制和提高吸附稳定性,太阳能板清洁机器人控制系统采用的是基于Android板开发的控制系统[5],该控制系统具有自动和手动双控制模式,可编辑程序上传至Android开发板。主控系统主要包括:
1)发动机控制单元。该单元控制器接收信号后,完成对车轮电动机及螺旋桨电动机的控制,从而实现在具有一定坡度的太阳能板上的行走。
2)主控制器。主控制器为Android板对外部指令和内部反馈的信号进行分析运算,并且给出进一步的指令,指导各部分进行下一步操作。
3)反馈装置。主要为安装在外壳周围的红外线仪,将外部的信号转换为电信号,反馈给主控制器,使其调节电动机转速,达到平移的目的。
4)执行元件。主要执行元件为电动机,包括车轮的4个小电动机和螺旋桨的1个大电动机。其中麦克纳姆轮电动机控制较为复杂,通过控制各个电动机的转速,可以实现轮子的不同转向。
太阳能板清洁机器人的控制过程如图3所示。该控制有两种模式。模式一为手动模式,选择此模式后,可以通过控制手柄按钮直接控制麦克纳姆轮的电动机,从而可以控制机器人朝着预想的方向行驶。模式二为自动模式,进入自动模式后,麦克纳姆轮电动机首先会同步转动,然后传感器进行数据采集,并将反馈的信号传入主控制器,再控制电动机旋转使机器人向预想的方 向 移动。通过传感器的反馈和主控制器的信号处理,可实现机器人在太阳能板上的全方位行走和无水清洁的功能。

图3 太阳能板清洁机器人的控制流程图
3 系统协同清洁实验
为了进一步完善太阳能板清洁机器人的各项功能,模拟现实环境对机器人的各项功能进行测试。
如图4所示,在露天阳台上已经长时间裸露的太阳能板,其表面上已经覆盖了大量的灰尘,较大程度上能够模拟实际环境。

图4 功能测试实验的模拟环境
1)爬行功能测试。
通过对麦克纳姆轮电动机程序的编写,控制机器进行运动,测试清洁机器人能否完成启动、停止、前后运动和转弯等功能。通过爬行测试,测出了清洁机器人运行的最佳速度。清洁机器人速度过快或过慢时,都会影响清洁效率。根据清扫和运动测试以及车轮直径,得到清洁机器人的最佳行驶速度在0.3 m/s。
2)吸附功能测试。
清洁机器人需要与吸附装置配合,才能保证其在太阳能板上运动时不会产生打滑的现象。经过实验测试,得到清洁机器人与太阳能板的滑动摩擦因数约为0.467,因此,可根据数据选择功率匹配的电动机驱动麦克纳姆轮。
3)清扫性能测试。
清洁机器人采用无水干式设计,清扫装置包括滚刷和位于底盘的抹布。滚刷进行初步的清扫,底部的抹布对太阳能板进行二次清洁。为了模拟实验条件,首先将收集的细沙和灰尘均匀地撒在5块太阳能板上,设置太阳能板的坡度为19.34°。在相同条件下分别进行5组实验,实验是通过清扫覆盖率和一次清扫率来评估清洁机器人的清洁能力,实验数据如表1所示。
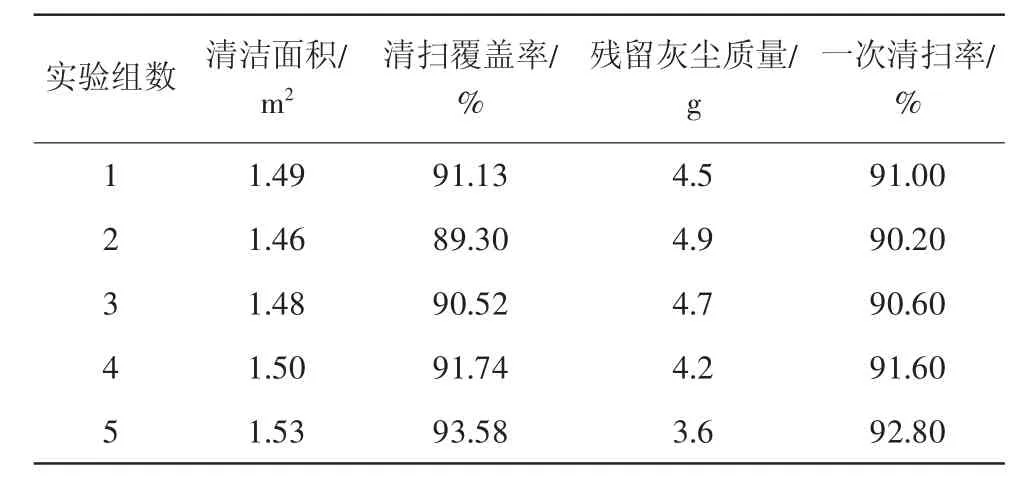
表1 清扫性能测试实验的数据表
太阳能板的尺寸为1.65 m×0.991 m,面积为1.635 m2。由于太阳能板的边缘和拐角处不易清扫,清洁机器人平均清扫面积为1.49 m2,平均清扫覆盖率为91.25%。实验初始在太阳能板上均匀洒了50 g的灰尘,待清洁机器人完成清扫后,通过测量太阳能板上残留灰尘质量和原质量之差值求出一次清扫率。残留灰尘的平均质量为4.38 g,平均一次清扫率为91.24%。清扫效果最好的是第5组,达到实验的预测标准。相比于传统的太阳能板清洗机器人,所开发的无水干式太阳能板清洗机器人能够完全避免水资源的消耗,降低了人力和物力成本,并且达到了较高的清洁效率。
4 结论
无水干式太阳能板清洁机器人的研发,解决了水资源流失的弊端,两种操作模式的切换,减轻了作业员的劳动强度;不仅结构简单,方便拆检换洗,而且实用性较强,麦克纳姆轮的特殊结构能够实现小车的自由运动,除了光伏板的清洗之外,还可适用于各种板状结构的清洁;能够在倾斜的太阳能光伏板上移动清洗,并且不需要消耗外部能源,且可以实现全自动移动清洗,较大程度上降低了设备使用的成本。
猜你喜欢
科学大众(2022年23期)2023-01-30
阅读(低年级)(2022年6期)2022-06-17
阅读(低年级)(2022年3期)2022-03-30
知识窗(2021年4期)2021-10-02
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
小哥白尼(趣味科学)(2018年4期)2018-06-21
进出口经理人(2016年8期)2016-11-04
发明与创新(2016年6期)2016-08-21
智能建筑电气技术(2015年5期)2015-12-10
