基于多源点云数据的铁路线路信息化
2023-12-08 10:30:20杨志坚
测绘通报 2023年11期
杨志坚
(甘肃铁道综合工程勘察院有限公司,甘肃 兰州 730000)
三维激光扫描技术可实时获取物体表面的三维空间信息和影像,具有效率高、数据密度大、数据质量好等特点。然而,与激光扫描系统的快速获取能力相比,数据处理的能力明显滞后。处理海量线路点云数据时没有专业的软件,只能基于通用软件进行操作;而通用算法与线路长带状特性不匹配,导致数据加载慢,且功能分散,常需要多个软件进行联合操作,效率低下;数据后处理过于依赖人工经验,导致自动化程度不高。随着铁路数字孪生技术的深入发展,面临着多源数据融合、智能化场景理解、初级可视量算升级到高级计算分析等诸多新要求。根据行业需要,梳理既有线路点云数据处理流程,结合线路特性整合及改进既有点云处理相关算法,进行线路点云数据处理系统的设计与开发,是激光扫描技术在铁路建设领域专业化应用亟待解决的问题。
目前,国内外已有许多学者针对钢轨点云的采集[1-3]、滤波[4-7]、分割[8-9]、特征提取[10-11]等方面做了大量研究,取得了显著进展,进一步提高了钢轨点云数据的处理效率和准确性。本文基于点云数据,分段解算线路中点位置信息,实现线路全线中线点的提取,拟合线路走向;针对分割后点云数据的几何特征,提取线路纵、横断面及水平切片;从既有线车站点云数据中识别站内附属结构物属性及位置信息,对轨道结构进行三维实景建模。
1 线路点云中心线提取
为提高点云数据处理效率,需在保证点云精度的前提下对原始点云数据进行预处理,主要包括滤波与精简[12-13]。进行滤波时,充分考虑点云自身包含的数据信息特点,并结合被扫描物体的结构特征,提高算法效率及精度;精简点云数据采用体素化法,用重心点代替体素内所有点的空间位置,达到数据精简的目的。
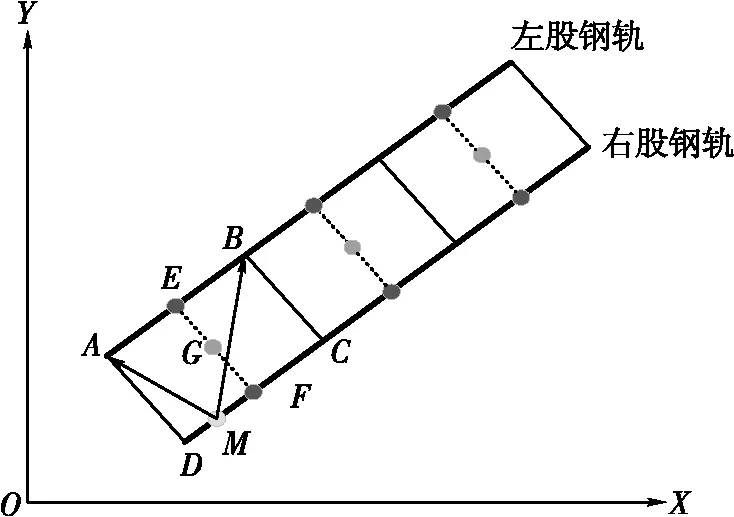
图1 线路中线点提取算法
重复上述步骤,依次遍历所有钢轨顶面点片段,按50 cm间隔提取钢轨顶面中点,由左右股钢轨顶面中点进一步解算线路中线点,如图2所示。
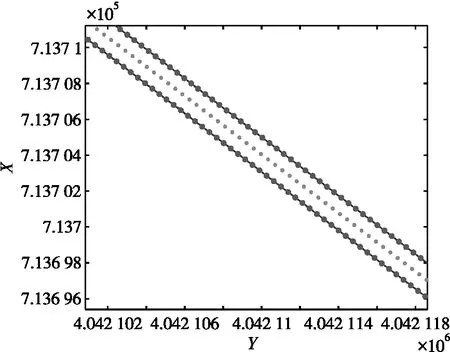
图2 线路中线点提取
2 线路剖面地形数据提取
2.1 线路平面线形数据提取
铁路线路平面线形数据的提取重点在于线路离散化点云特征的分离和重组,本质是钢轨点云数据在整体点云模型中分割后的几何特征提取及线形条件约束,可通过算法实现。
(1)基于色域聚类的钢轨点云集构建。无人机点云数据需要针对不同线路建筑物或轨道设备分类构建点云信息集合。这就要求将钢轨坐标信息从庞大的点云数据库中剥离出来,但钢轨点云数据因其结构的交错性,无法实现直接精准的读取。本文借助无人机点云数据的XYZ+RGB三通道特性,设置钢轨遍寻种子点,以RGB数据为判别指标,访寻具有与钢轨相同RGB特性的点聚类,从而将钢轨与轨道其他结构物分离,提取钢轨点云数据。
(2)钢轨几何特征重构。将点云数据向线路平面投影,将三维点云作平面化二维处理,利用色域聚类点云数据剥离办法,找寻钢轨二维轮廓坐标范围,在范围内的原始点云三维数据即为钢轨点云数据。利用该方法对数据重构不受线路走向和高程的变化影响,但提取的钢轨点云数据因扣件等与钢轨同质材料,点云数据噪点多。考虑钢轨在线路平面上的高度优势,应用RANSAC随机采样一致性算法设置数据高程阈值,结合钢轨制造出厂检验标准设定收敛条件,可对提取点进一步筛选,得到钢轨几何特征。
受无人机点云采样密度、线路遮挡、数据筛选等因素影响,经上述措施处理得到的点云数据存在数据断链,需结合钢轨标准断面基于三次样条插值求解三弯矩方程组,完成筛选点的拟合。拟合步长越短,数据越精确,但计算耗时越长。经测试,拟合步长设置为1 m时,可有效补充数据断链。
(3)线路中心线重构。在已得钢轨点云集中,提取最高点下16 mm的点云数据,以钢轨轨头厚度作为判别标准保留线路中心线近侧钢轨点云数据,设置步长为1 m、厚度为10 mm、垂直于线路走向的数据切片,将点云数据封装在10 mm的单元中,对单元中所有点的坐标取平均值,再求解两侧单元坐标平均值的中点坐标,可获得线路中心线。切片厚度越小,数据约精准,但点云数据越少,当钢轨点云数据稀疏时,还会有数据缺失,致使线路中心线产生严重偏差。经测试,切片厚度设置为10 mm,可满足数据精度要求。
2.2 线路纵横断面数据提取
2.2.1 线路纵断面提取
线路中心线可以通过一个三维点位和方向向量表示。其中三维点位可以确定线路断面的位置,方向向量可表征断面的方向。
2.2.2 线路横断面提取
铁路中线空间线形中任意里程处的横断面必须与线路中线严格垂直。选取线路中任一里程CK,结合里程处的法线斜率,得到该点里程处的断面方程。同纵断面提取原理,对横断面点云曲线进行降噪、拟合,设定高程、里程标尺,绘制线路横断面图。
3 线路附属结构物特征提取
3.1 接触线的提取
铁路接触网主要采用链形接触悬挂的形式架设在线路上方。链形接触悬挂主要由接触线、吊弦、承力索等组成[14],如图3所示。采用主成分分析法(principal component analysis,PCA),根据k邻域方法提取点云数据。将代表该点最大主方向的特征值λ1作为特征向量v1,设置v1在Z方向上的分量v1z阈值,超过阈值,则判定为杂项点,予以剔除,只保留阈值内的点,从而获得与水平面平行的线状点云。
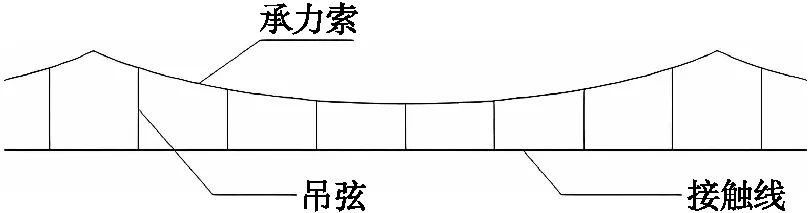
图3 链形悬挂示意
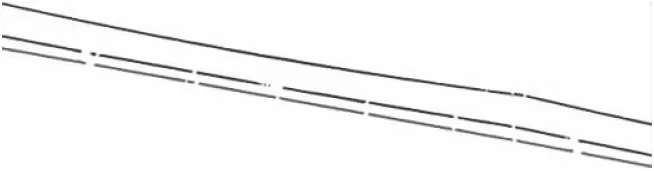
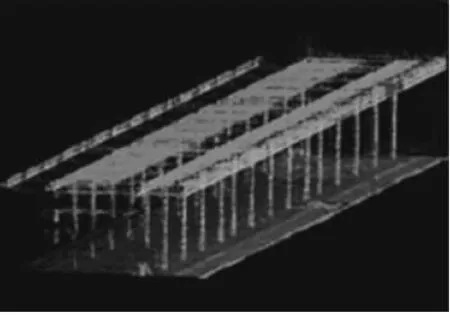
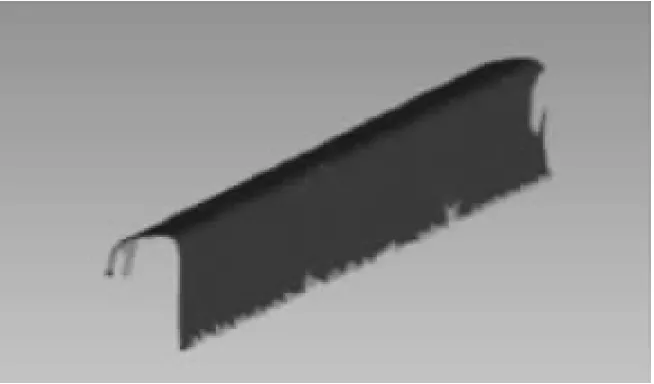
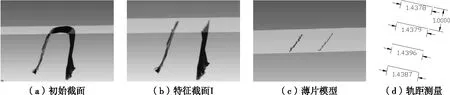
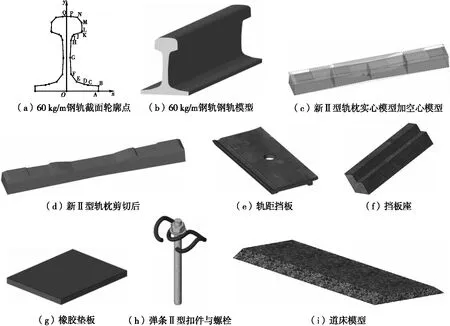
考虑接触线与承力索和回流线的距离特性,接触线点云数据可利用激光点聚类法搜寻搜寻满足条件di 图4 移动激光点聚类原理 图5 接触线点云提取结果 通过点云预处理软件分割获得车站点云数据,如图6所示,并以此为基础进行站内附属设备识别提取。 铁路站台为运输生产中重要的服务设施,而站台限界检测是铁路安全运输重要保障,因此需严格控制站台与列车之间的空隙大小。 在提取线路中心线基础上,按照《标准轨距铁路限界第2部分:建筑限界》(GB 146.2—2020)规范要求,旅客站台建筑限界距离线路中线1750 mm,设置参数提取站台界限,并将站台范围以坐标形式存储在Excel表格中。图7为提取的部分站台点云数据。 图7 站台点云数据 导线支柱作为车站内又一重要构筑物,其位置同样影响行车安全。识别支柱位置也是研究的重要内容,根据点云数据反射率识别支柱,如图8所示。 图8 车站导线支柱点云 点云分割是根据点云空间分布特征、几何特征、纹理特征等进行划分,使得相同划分内的点云拥有相似的特征[15]。 设定钢轨反射强度阈值I,滤除与钢轨反射特性不符的点,减少点云数据量,提高分割效率,筛选后点云的体积为筛选前的2%;选取起始里程端一点作为种子点,根据钢轨几何尺寸设定空间距离阈值R筛选;在筛选点集中找到距种子点最远的点逐步替换种子点,继续筛选,直至筛选出单个点云文件内的单根钢轨点;根据文件编号提取全线钢轨。 钢轨点云是无任何拓扑信息的离散点集,为还原钢轨模型,需将钢轨点云数据进行模型封装。点云封装实质是利用点云数据构造微小的空间三角形,使之近似代替模型表面实现模型重建,如图9所示。 图9 钢轨封装模型 依次封装左右股钢轨,利用封装的钢轨模型切片进行轨距测量,从而提取钢轨截面几何特性参数。 (1)选取钢轨最高点,拟合与钢轨顶面重合的初始截面,如图10(a)所示。 图10 提取钢轨截面几何特性参数 (2)将初始截面向下平移16 mm获取特征截面Ⅰ,删除特征截面以上的封装模型,如图10(b)所示。 (3)将特征截面Ⅰ竖直向下平移0.1 mm获得特征截面Ⅱ,删除特征截面Ⅱ以下的封装模型,保留钢轨内侧薄片模型,作为轨距测量边线。图10(c)中右侧薄片模型为左轨轨距测量边线。 (4)将左右轨距测量边线导入CAD,利用VBA语言按1 m间距绘制轨距测量边线的法线,删除超过轨距测量边线范围的法线,调用距离查询命令,可测得轨距值,如图10(d)所示。 利用Revit软件,以60钢轨、新Ⅱ型枕、弹条Ⅱ型扣件为例,绘制钢轨结构模型,如图11所示。 图11 钢轨结构模型 轨道结构标准构件库创建完成后,需要对各个构件进行装配,组成线路一体化模型。为了减少工作量,通过分析轨道构件的特点,将创建好的轨枕和扣件系统模型在Revit的一个族样板中进行整合,形成轨枕嵌套族[16]。如图12所示,可将单个轨枕模型载入“公制常规模型.rft”族样板,随后将扣件系统各族按图纸与轨枕拼接,形成嵌套族。 图12 轨枕嵌套族 利用Dynamo将轨枕嵌套族沿线路中心线进行装配,具体思路为:把嵌套族的数量进行参数化,嵌套族的个数=线路长度/轨枕间距,调用“Curve.PointAtParameter”节点在线路中心线上获取与嵌套族个数等数量的点,基于这些参照点,运行Dynamo驱动布置程序即可完成嵌套族的装配。随后将已创建好的钢轨与道床族载入该项目文件,最终装配成果如图13所示。轨道结构三维模型也可利用点云数据按里程生成。 图13 有砟轨道模型装配成果 (1)本文采用以反射强度数值和线路几何约束为条件的线路钢轨点云融合滤波方法,得到轻量化的钢轨点云数据;借助微分思想以直代曲分段拟合钢轨顶面中线,分段解算钢轨顶面中点与线路中点位置信息,实现线路全线中线点的提取。 (2)应用RANSAC随机采样一致性算法确定钢轨点云模型位于轨腰部分的投影平面并实现降维处理,以高速铁路所用钢轨轨头宽度允许误差作为收敛条件,建立钢轨模型,提取线路平面线,再根据纵横断面与平面线的关系提取其数据。 (3)利用主成分分析法和移动激光点聚类法提取铁路接触线的算法,并通过点云预处理软件分割获得车站点云数据,以《建筑限界》规范要求作为约束条件提取站台界限,提取坐标数据,按照工程图例规范要求,实现站内建、构筑物标识功能。 (4)基于反射强度的区域增长分割算法,实现了钢轨的快速分割。主要研究基于Revit的铁路关键工点构造物BIM化建模方法,对线路上部轨道结构进行实体拆分,建立轨道结构标准构件族库。采用Dynamo编程语言对Revit进行二次开发,可以快速创建轨道施工BIM模型,为关键工点的BIM化建模提供算法支持。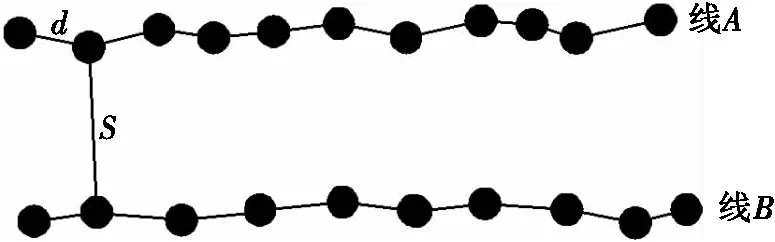
3.2 站内附属设备识别
4 轨道结构三维实景建模
4.1 钢轨线路提取
4.2 轨道结构三维建模及应用
4.3 模型的装配
5 结 论
猜你喜欢
中学生理科应试(2024年6期)2024-01-01 00:00:00
系统工程学报(2021年4期)2021-12-21 06:21:24
制造技术与机床(2017年8期)2017-11-27 02:10:22
——目镜套筒
上海计量测试(2016年1期)2016-08-03 11:30:56
中外医疗(2015年5期)2016-01-04 03:57:53
中国铁道科学(2015年5期)2015-06-21 06:53:20
中国铁道科学(2015年4期)2015-06-21 06:46:04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:00
中国铁道科学(2014年6期)2014-06-21 06:35:22
计算机工程(2014年6期)2014-02-28 01:25:29