融合多源数据的城市三维建模方法探索
2023-12-08 10:02胡晓静陈延博李书丹
测绘通报 2023年11期
胡晓静,刘 钰,陈延博,李书丹,李 遥
(自然资源部第二地形测量队,陕西 西安 710054)
城市实体三维建模是城市级实景三维建设的一个重要内容,也是实现数字测绘的重要过程[1]。现今,测绘科学发展迅猛、技术储备坚实强劲,为城市实体三维建模提供了更为充足的数据源[2]。目前,多源数据融合的城市三维重建的技术已成为研究热点[3]。
无人机倾斜摄影测量因可感知高清晰、高精度、大范围的复杂场景而成为城市精细化三维建模的热点高新技术,相比于传统人工建模技术得到很大提升[4-5],利用倾斜摄影平台能快速获取多角度的影像,已成为当前获取空间数据不可或缺的方式之一,尤其是在三维城市建设领域有着特殊优势。然而,因其作业方式的局限性,视角遮挡严重导致模型侧面精度低及部分纹理缺失,完整度不高。激光雷达可以直接探测物体表面位置而被广泛应用于三维重建[6-7],其为脉冲式主动遥感方式,避免了因投影带来的信息损失。地面激光扫描数据在变形监测、古迹保护、地形数据采集等领域应用较广泛[8-9]。
随着数据融合技术的发展、数据量的迅猛增长和数据多元化,数据信息越来越丰富的背景,多源数据融合的概念也由此被提出[10-11]。鉴于遥感数据的多源性、实时性,面向三维重建的数据也由单一向多源过渡[12]。本文拟探索融合数据源的增多是否会达到更好的结果,以及如何将多源信息有效组织并进行综合应用。
1 试验区和数据源
以西安市碑林区陕西省测绘地理信息局作为试验区域,试验区位置如图1所示。该区域地势相对平坦,地物较多,地物特征明显,视野较为开阔,适合本次无人机与地面协同作业。
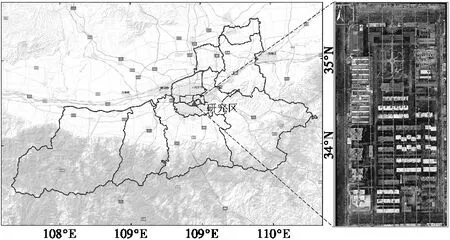
图1 试验区位置及飞行航线
1.1 无人机倾斜摄影数据
无人机倾斜影像采用大疆经纬M600 Pro获取。数据获取于2022年,如图1右侧所示,航线总长为10 200 m,航高为200 m,航向重叠度为80%,旁向重叠度为70%,测区有效面积为0.18 km2。
1.2 机载激光雷达数据
试验区的机载LiDAR数据采用南方SZT-R1000系统获取,其为脉冲式激光LiDAR,最大测量距离为1350 m。数据获取于2022年2月21日,航线飞行为井字形设计,航线总长为12 000 m,航高为240 m。如图2所示,数据采集后,通过相关软件进行解算,坐标系统设置为CGCS2000,高程系统为1985高程系统。
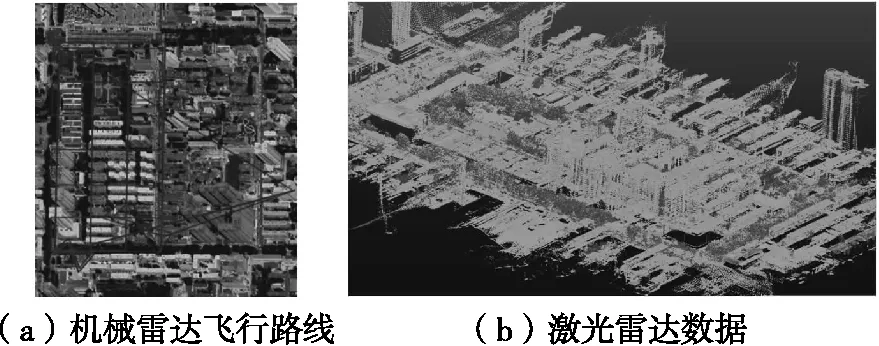
图2 机载雷达飞行航线图及机载激光雷达点云
1.3 三维激光扫描数据
地面激光LiDAR数据使用徕卡RTC360获取,本次试验工架设约100站,站点绕试验区外围一圈及内部主要干道布设,如图3所示。获取数据后使用Cyclone软件对点云做拼接和坐标转换,坐标系统设置为CGCS2000,高程系统为1985高程系统。
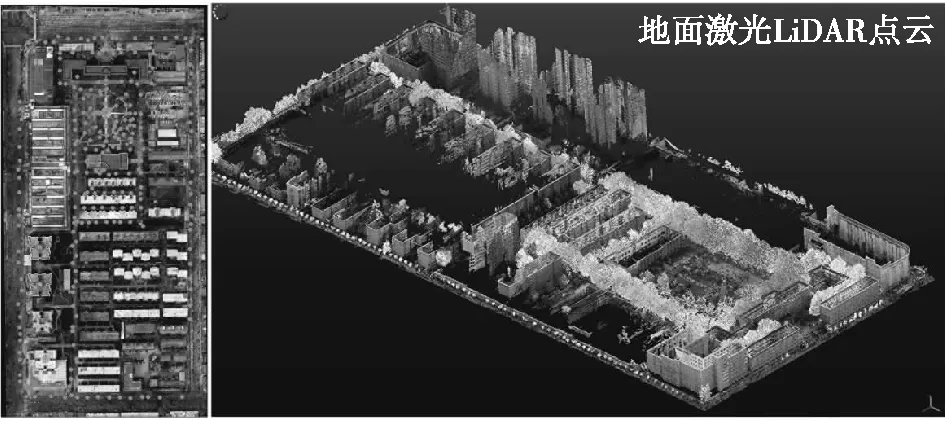
图3 地面扫描站布设及扫描点云
2 多源数据的融合建模方法
多源数据建模的流程如图4所示。首先进行多源数据预处理,内容包括统一多源数坐标系、数据同质化、点云预处理工作;然后利用多源数据融合算法进行点云的配准融合;最后根据融合点云进行三维场景构建和根据融合场景进行城市实体建模。
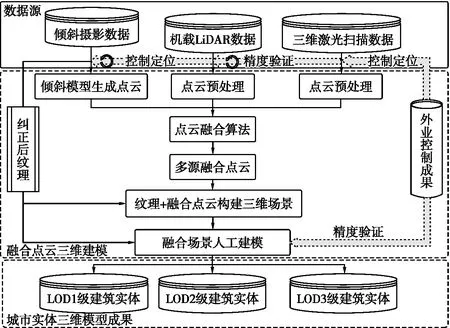
图4 多源数据建模流程
2.1 多源数据预处理
为了更方便实现数据配准,首先需统一多源数坐标系,即在数据获取时将3种数据统一到同一坐标系下;然后是数据同质化,由于无人机获取的倾斜影像和点云为异质性数据源,需要将影像转换为点云实现数据格式统一[13]。之后为点云预处理,即对机载激光雷达数据和地面三维激光扫描数做预处理,包括点云去噪和点云分类、点云赋色等。
2.2 多源数据融合算法
考虑模型与纹理的贴合性,本文将倾斜影像点云作为配准基准,把机载激光雷达点云和地面三维激光扫描点云往倾斜影像点云上配准,该步骤使用最经典的迭代最近点法(iterative closest point,ICP)配准算法。图5为配准前后点云分布图,点云匹配精度较好,点位中误差为2.6 cm。
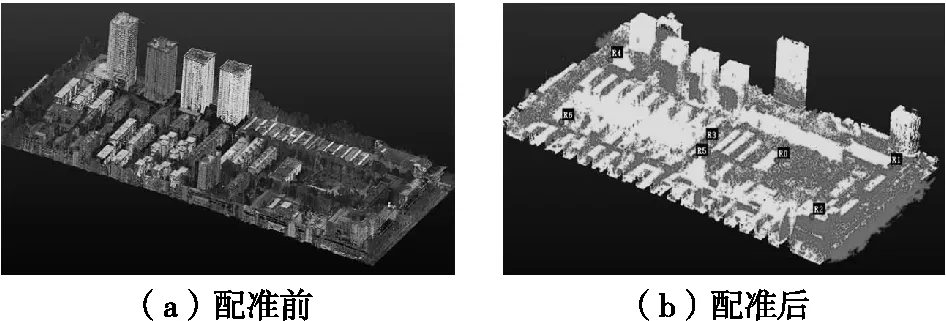
图5 配准前后点云分布
多源数据能保证建模的完整性,但同时也存在数据重复。因此本文提出点云空间重组方法——地面区域及地面到屋顶之间的侧面使用地面激光扫描点云+地面纹理、建筑物顶面使用机载LiDAR点云+顶面纹理。以此方法来简化数据,在保证数据完整性的同时提高计算效率。数据融合后将其导入ContextCapture软件中进行三维场景构建,得到多源数据融合后的城市三维场景效果,成果如图6所示。
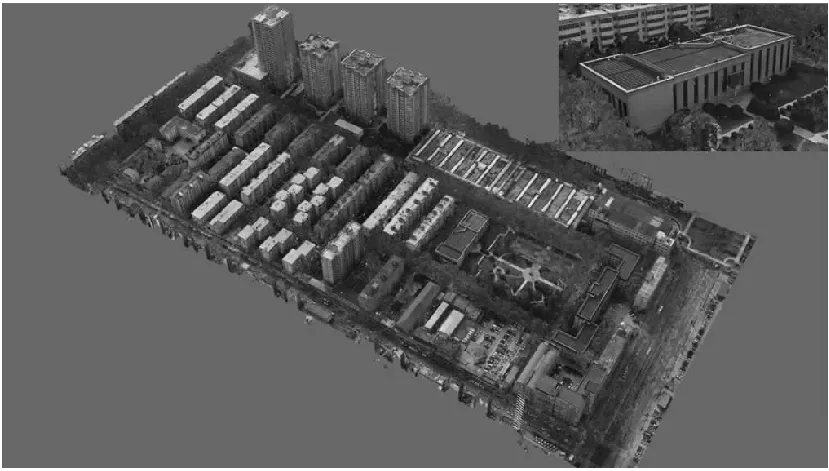
图6 融合点云三维场景
2.3 场景实体化
根据开放地理空间信息联盟 (Open Geospatial Consortium,OGC)对城市细节等级要求进行单体化采集,利用SVS Modeler软件,分别采集了LOD1—LOD3等级的建筑实体,成果如图7所示。
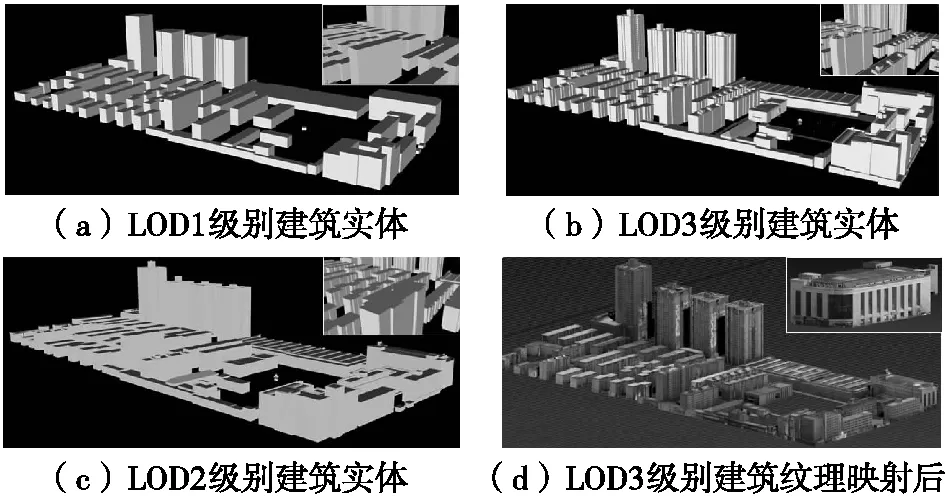
图7 不同等级模型成果
3 成果分析
3.1 融合数据三维场景成果分析
将融合数据构建的场景与单独无人机倾斜摄影数据构建的三维场景在视觉效果和成果精度上作对比分析,如图8所示。多源数据融合后的模型细节表现力更强。模型拉花、变形和漏洞等现象明显减少。在添加纹理后数据融合前后效果对比更加明显。由此可见,利用激光雷达数据改善无人机倾斜测量模型的精细度具有重要作用,弥补了单一建模技术的局限性[14-15]。
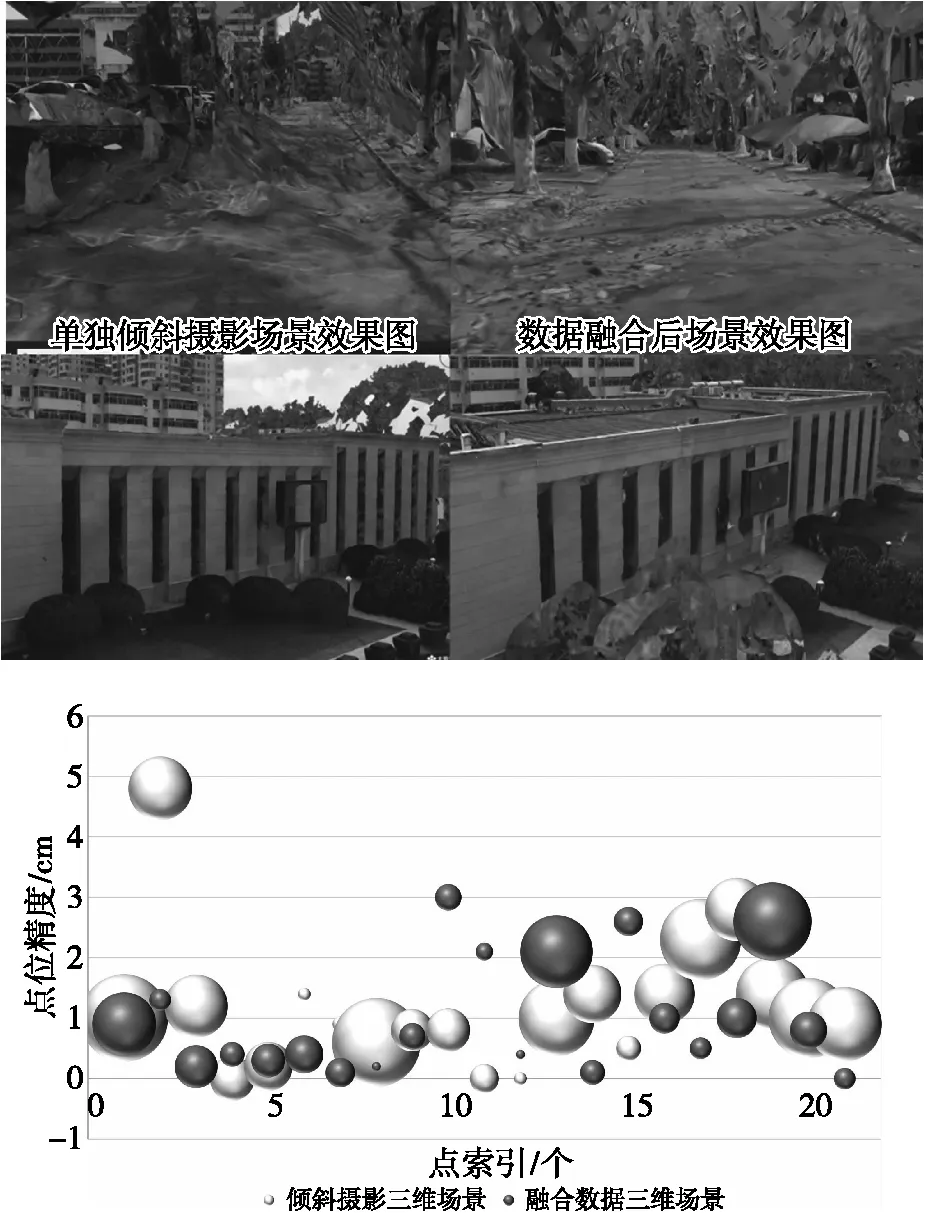
图8 单一数据与融合数据场景效果及精度对比
除了视觉上的直观效果对比,还利用一些检测点对这两种场景的精度作了对比。使用RTK采集了 21 个检查点,分别计算两种场景上的平面中误差和高程中误差,两种场景的整体中误差对比见表1。模型平面中误差和高程误差计算公式为
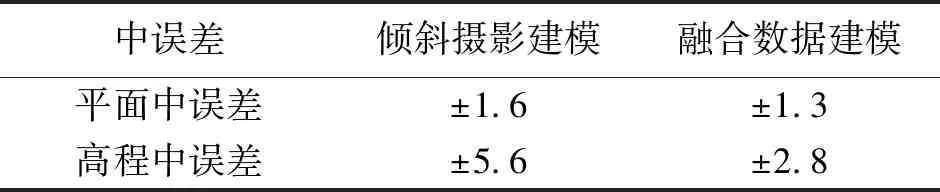
表1 单一数据与融合数据构建场景精度对比 cm
(1)
(2)
根据精度分析结果可以看出,融合数据构建的三维场景在场景完善度和精度上都要优于单一数据构建的三维场景。
3.2 融合数据建模精度分析
为验证不同等级的城市实体模型精确度,在外业实测中将控制点作为验证数据,在不同等级模型上采集了一些点作为精度验证,如图9所示,其中LOD1等级点位精度为0.33 m,LOD2等级点位精度为0.07 m,LOD3等级点位精度为0.05 m。以上模型均达到了CityGML关于城市等级的精度要求。
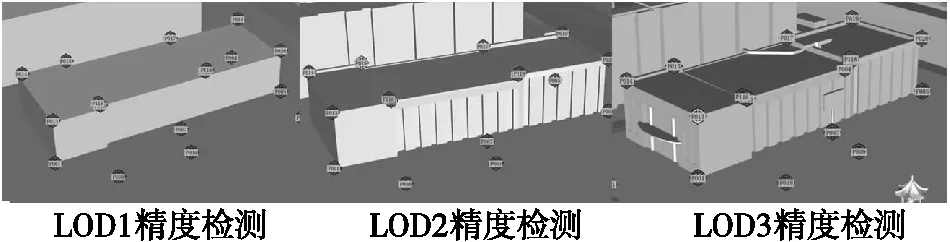
图9 不同等级白模精度检测点位
4 结 论
本文根据目前三维建模常用的多源数据,实现了试验区城市实体三维重建,结果表明:
(1)该方法能够高效地实现多源数据融合建模;根据点云空间重组方法降低了数据冗余,提高了建模效率。
(2)融合数据构建的三维场景在精细度和成果精度上都有提高。融合数据场景更完善,地面更加平整、细节表现较为清晰;融合数据场景成果精度也高于单独的倾斜摄影数据场景精度。
(3)多源融合数据构建的不同细节程度的城市模型精度高,均符合CityGML对于城市实体的要求。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中国交通信息化(2019年1期)2019-03-26
今日农业(2019年10期)2019-01-04
电子制作(2018年17期)2018-09-28
电子制作(2018年16期)2018-09-26
现代营销(创富信息版)(2018年8期)2018-09-08
通信电源技术(2018年5期)2018-08-23
大社会(2016年6期)2016-05-04