盾构隧道点云模块化提取方法
2023-12-08 10:02林乐胜
测绘通报 2023年11期
林乐胜,林 松
(1.江苏建筑职业技术学院建造学院,江苏 徐州 221116; 2.惠州市自然资源规划勘测院,广东 惠州 516000)
隧道的长期运营和各部位受力不均匀易导致隧道发生不规则形变,因此对隧道进行监测时需要对隧道各个模块进行形变分析[1],盾构隧道由多个单环管片拼装而成,而每环管片由若干个预制混凝土管片块铆接而成。地铁隧道由于长期受不均匀地下压力的影响,易在管片块接缝位置发生不规则形变[2-4]。传统利用测距仪、水准仪、全站仪等测量仪器测定待定点的形变值,不仅需要消耗大量人力、物力,且采集的数据量有限,分析结果准确度较低[5-7]。三维激光扫描技术被广泛应用于地铁隧道监测领域[8-10],在地铁隧道建设和运营期间进行有效的隧道结构形变检测,可大大减少地铁隧道安全事故的发生。文献[11]基于数形结合的思想,将移动激光扫描的点云生成隧道平铺图,提取竖直缝环,但由于移动扫描断面与隧道横断面不平行,导致少量非竖直环缝无法提取。文献[12]利用几何特征代替反射率特征生成影像,且为每一个点定义几何权重突出管缝特征,这种方法易受噪声影响,稳健性不高。文献[13]直接利用隧道环间和管片模块间的拼接缝向外突起的特征提取拼接缝,实现模块的分割,这种方法稳健性较差且需要人机交互。
为此,本文提出一种基于盾构隧道点云模块缝的中轴线提取方法。首先基于RANSAC算法[14]拟合出盾构隧道点云的初始中轴线及半径,再基于轴线及半径将盾构隧道点云进行圆柱展开;然后将展开的隧道点云数据转为栅格图像,并基于带限制条件的Hough变换[15-16]实现隧道环间尺度分割和模块分割;最后利用隧道环内模块缝点云的拟合环片中心,实现隧道中轴线提取。
1 模块化提取方法
1.1 基于RANSAC算法实现隧道点云去噪及圆柱展开
理想的盾构隧道断面圆参数方程为
Ci=Oi+r·l1cosθ+l2sinθ
(1)
式中,Ci为理想隧道断面圆;Oi为圆心;r为半径,l1和l2分别为与轴线两两互相垂直的单位向量;θ为隧道上某点至l1的夹角。
利用RANSAC算法可得到初始轴线方程及圆柱半径,设置噪声滤波参数Δd滤出扫描点至拟合中心距离[r-Δd,r+Δd]内的点云,并将其作为试验点,再设置梯度Δδ,将θ从0°递增至360°,即可实现隧道点云的圆柱展开,如图1所示。
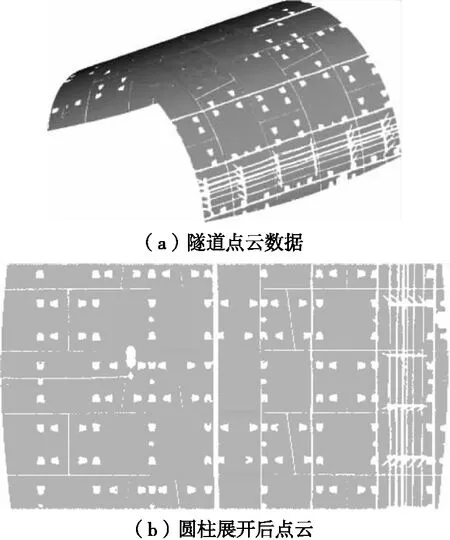
图1 隧道点云圆柱展开
1.2 基于Hough直线检测方法实现隧道环块提取
Hough变换是基于对偶原理,把原空间问题转换到对偶空间去求解,即将原来的笛卡尔空间转换到极坐标参数空间。笛卡尔空间上的一个位置确定的点(x0,y0),经过该点的直线方程为:y0=k·x0+b,由于k、b的不确定性,因此直线为无数条。Hough变换为将参数空间改为极坐标空间,将直线转为(r,θ)空间多个曲线的交点。经过变换,图像空间中的每个点(x,y)被映射为一个(r,θ)极坐标空间中的正弦曲线,而图像空间中共线的点(r,θ)所对应空间中正弦曲线相交于一点(r′,θ′),如图2所示。
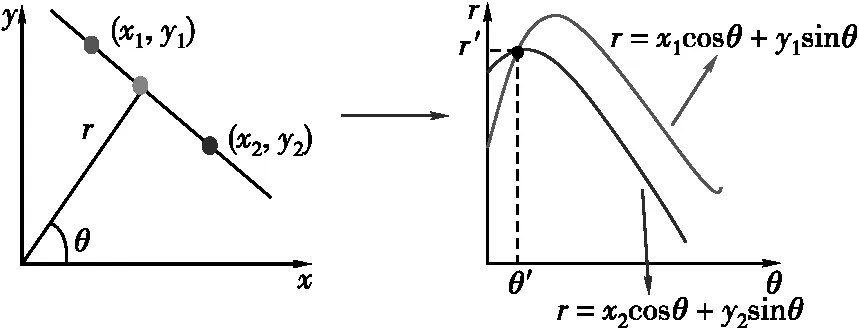
图2 极坐标空间转换
对展开后的隧道点云数据进行栅格化,如图3(a)所示。首先在Hough变换提取过程中加入两个限制条件:一是转换中的θ角度,设置为0,即只提取竖直线;二是设置提取直线的长度,提取结果如图3(b)所示,提取的竖直线可作为环片切割线,实现环片提取,如图3(c)所示。
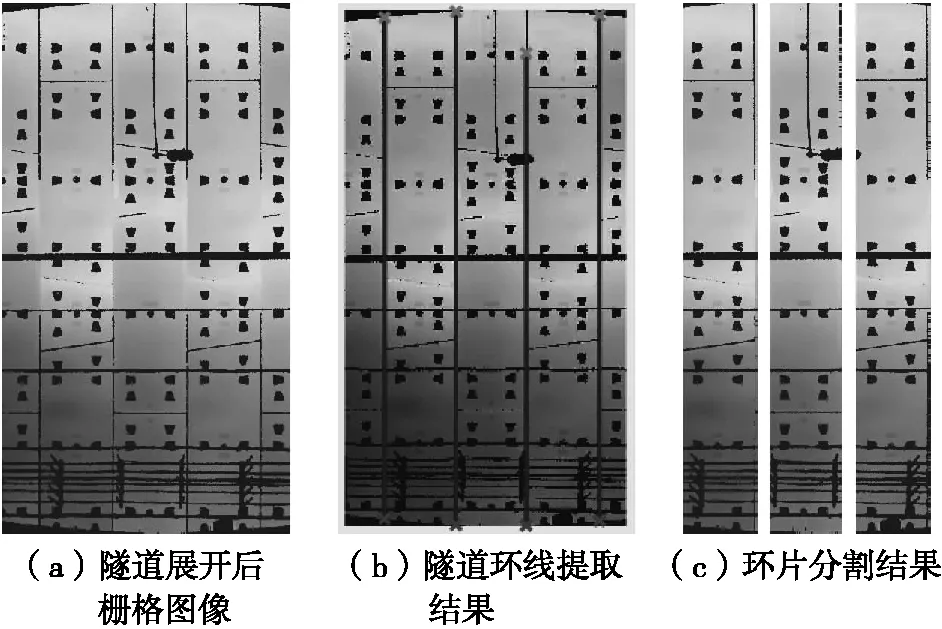
图3 有条件限制的Hough直线提取结果
1.3 基于图像匹配的模块提取
盾构隧道一环内一般由1个封顶块、2个邻接块及N块标准块组成。其中,封顶块和邻接块中间部位的螺栓孔的数量和布局与其他位置上螺栓孔的数量和布局不同,可以利用每环内特定螺栓孔数和螺栓孔布局的特殊性,提取封顶块和邻接块。
封顶块点云提取步骤如下:
(1)构建标准中心螺栓模块矩阵。从展开图中截取一个标准的中心模板,构建m×n的矩阵,如图4所示。
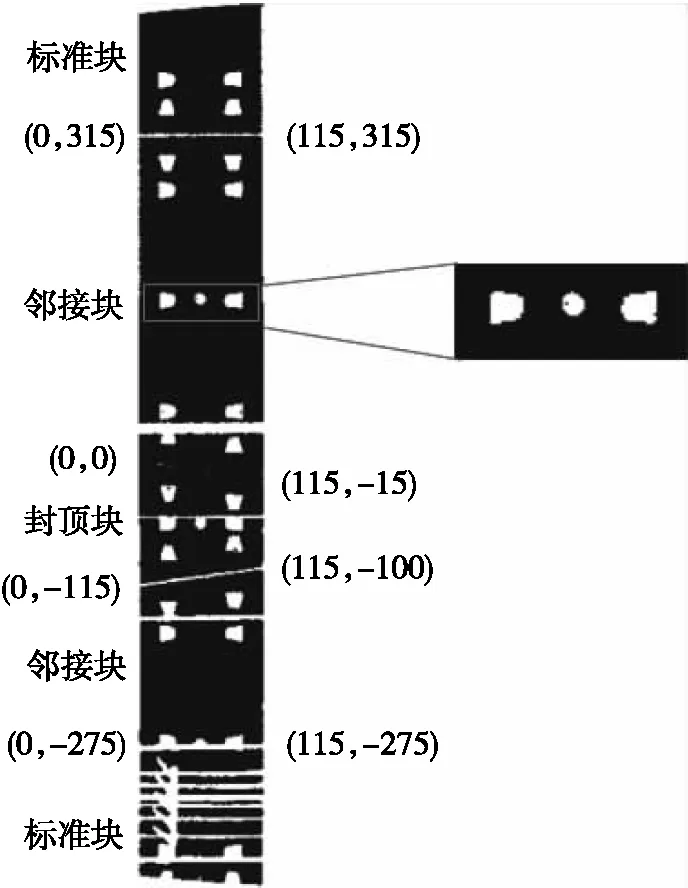
图4 环片尺寸及构造
(2)匹配模块矩阵。将模块矩阵在每个环片上滑动,遍历整个图像,计算模板矩阵与模板覆盖矩阵的相似度。相似度函数可表示为
(2)
式中,T表示模板图像函数;l表示隧道图像函数;(x,y)为图像的像素坐标,图像坐标系以图像左上角为原点,x表示横轴坐标,y表示纵轴坐标;坐标(i,j)为模板图像的像素坐标,模板图像坐标系以模板图像左上角为原点,i表示横轴坐标,j表示纵轴坐标。取相似度目标函数前两个所在位置中心点坐标,即为模块中心坐标。
(3)匹配邻接块和标准块。当识别出模块中心后,依据各模块中心的距离(图4标定的尺寸)识别出该模块的属性,并以封顶块为基准识别其他模块。最后将图像分割结果映射到空间点云中实现隧道点云的模块化分割。
2 实例验证与分析
首先采用地面三维激光扫描仪对某地铁隧道进行数据采集,采集后点云数据如图5(a)所示;然后采用基于限制条件的Hough变换提取隧道环线,隧道环点云分割结果如图5(b)所示;最后对各环片进行模块分割,分割结果如图5(c)所示。
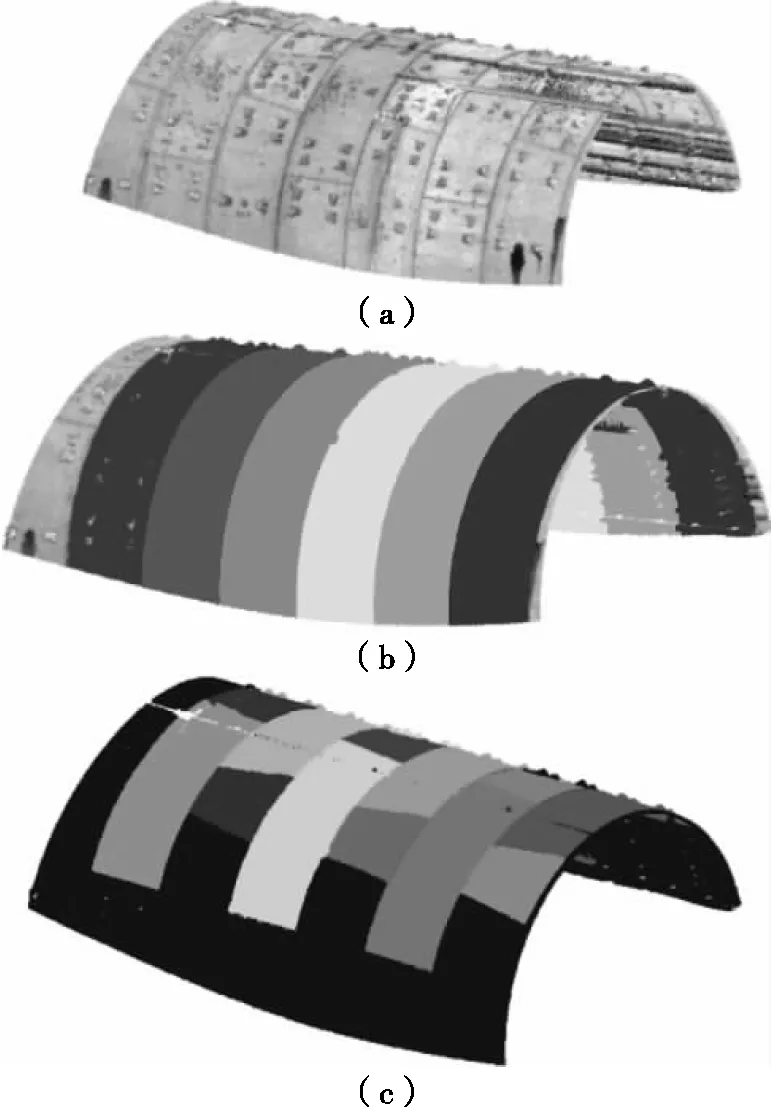
图5 隧道模块分割试验
上述试验表明,基于Hough直线检测方法能实现隧道环块点云完整提取,受单站数据采集不全及环块两端噪声点过多影响,基于图像匹配的模块提取方法不能提取隧道环块两端的标准块,但基于图像匹配的模块提取方法能实现环块中的邻接块及封顶块点云分割,且提取效果较为理想。
3 结 语
针对盾构隧道点云数据,本文提出了一种模块化提取的方法,该方法将隧道点云数据转为栅格数据,基于较成熟的图像处理算法,能够有效提取盾构隧道内模块数据,且稳定性较高,为盾构隧道点云后续应用提供模块基础数据。本文的模块化提取算法适用于直线型盾构隧道点云,对于非直线形隧道的模块化提取方法将是后续的研究方向。
猜你喜欢
中学生数理化·八年级物理人教版(2021年5期)2021-11-22
云南画报(2020年9期)2020-10-27
商周刊(2018年17期)2018-12-06
小学生导刊(2018年13期)2018-11-30
数学小灵通·3-4年级(2017年10期)2017-11-08
小学生导刊(低年级)(2017年2期)2017-06-10
国际木业(2016年10期)2016-12-21
中国房地产业(2016年9期)2016-03-01
工程建设与设计(2016年4期)2016-02-27
中国质量与标准导报(2014年7期)2014-02-28