基于模糊PID的水肥一体化灌溉控制系统设计
2023-12-06 10:48汤春球刘凤来余自良
数字制造科学 2023年4期
汤春球,刘凤来,余自良
(武汉理工大学 机电工程学院,湖北 武汉 430070)
目前粗放式的灌溉与撒肥造成了水资源和肥料的严重浪费,肥料不仅不能最大限度发挥其效力,也会在一定程度上破坏土壤墒情[1]。因此,水肥一体化灌溉系统的设计与应用,对节水、节肥具有重要意义。
由于土壤是一个大惯性、具有滞后性的系统,在灌溉时,湿度传感器不能及时反映出土壤的真正湿度,当传感器检测湿度达到设定值时,关闭灌溉阀门后,管道中剩余的肥液会继续传输到作物根部,致使实际土壤湿度大于设定土壤湿度[2];笔者结合模糊控制与PID(proportion integral differential)控制的优点设计了模糊PID控制算法,基于专家知识与工作人员经验制定了模糊PID控制规则表,对土壤实际含水量、含肥量与土壤理想情况下需水量、需肥量进行模糊决策,通过控制灌溉阀门开度控制灌溉的快慢,采用模糊PID控制算法灌溉时,在灌溉前期会增大灌溉阀门开度使土壤湿度尽快达到且小于设定湿度值,然后控制系统会随着检测的实际湿度值的增大而减小阀门开度,直至最后湿度达到设定值,关闭阀门,避免出现灌溉过量的情况。
1 水肥一体化灌溉系统总体设计
设计的水肥一体化灌溉系统由环境信息采集模块、水肥一体机模块、PLC(programmable logic controller)与触摸屏控制模块、农业物联网服务平台模块等组成。系统结构如图1所示。环境信息采集模块通过CC2350控制传感器采集环境数据并通过ZigBee无线传输模块传送到PLC,并接收PLC下发的采集环境信息的指令,进而控制各传感器工作[3]。水肥一体机模块由各种电磁阀、混肥罐、管道等组成,电磁阀接收PLC下发的混肥与灌溉指令,需要灌溉时,水肥一体机按照指令配置好一定浓度的水肥溶液,然后通过管道将肥液输送到作物根部,并通过控制电磁阀的开度来控制灌溉的快慢。PLC与触摸屏模块由西门子S7-200PLC和昆仑通态公司开发的10寸TCP7072Gi触摸显示屏组成,该模块是灌溉系统的控制核心。需要灌溉时,PLC将接收的土壤数据传递给模糊PID控制器,模糊PID控制器对信息进行分析与处理,PLC会下发指令给水肥一体机模块进行灌溉,灌溉的同时PLC会实时地发送指令给环境信息采集模块实时采集土壤湿度数据,若土壤湿度稳定在设定湿度范围内,则停止灌溉[4]。农业物联网服务平台采用B/S架构体系(浏览器/服务器),采用可视化开发工具将数据信息进行可视化显示,同时在服务器安装了MySQL数据库以及应用程序,这样就可以把传感器采集来的环境数据存储起来或者进行处理,实现了对水肥的远程化、智能化灌溉,用户可以在手机或电脑端进行登录,对现场作物与水肥一体机灌溉系统进行监测与控制[5-7]。
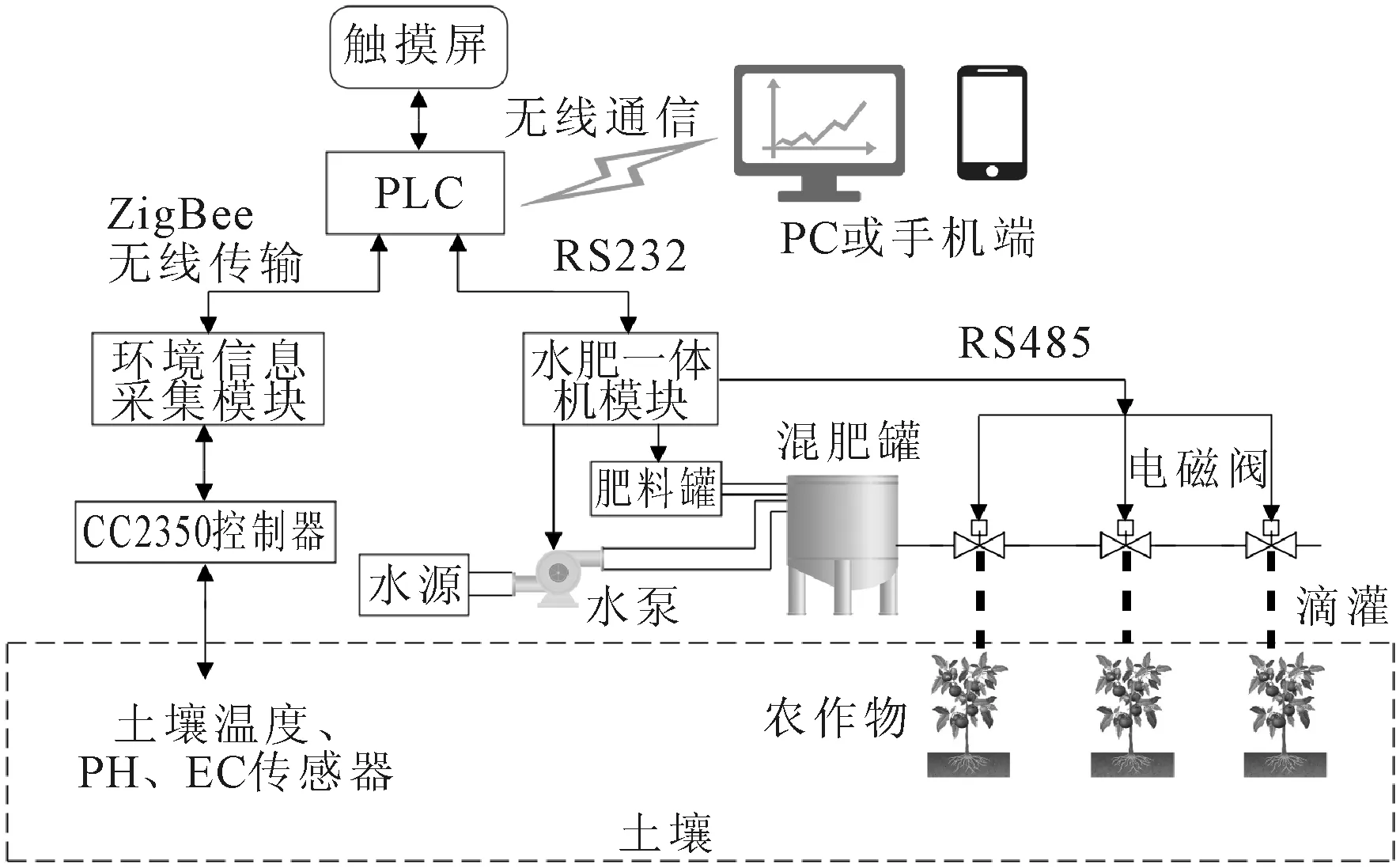
图1 水肥一体化灌溉控制系统结构
2 模糊PID控制算法设计
土壤是一个大惯性、非线性和时滞性的系统,无法对其建立精确与统一的数学模型,传统的PID控制或模糊控制在控制精度和实时性上难以满足控制要求[8-9]。因此,笔者设计了一种由模糊控制和PID控制相结合的模糊PID控制算法,利用Simulink建模仿真验证算法的可靠性,经过实际灌溉测试,验证了灌溉系统的可行性。
2.1 模糊PID控制器设计
模糊PID控制器由模糊控制器和参数可调的PID控制器组成[10],其结构如图2所示。该模糊PID控制器采用双输入单输出型,通过控制灌溉阀门开度来控制土壤湿度,而土壤中肥料浓度是按之前混肥浓度来最终确定的。
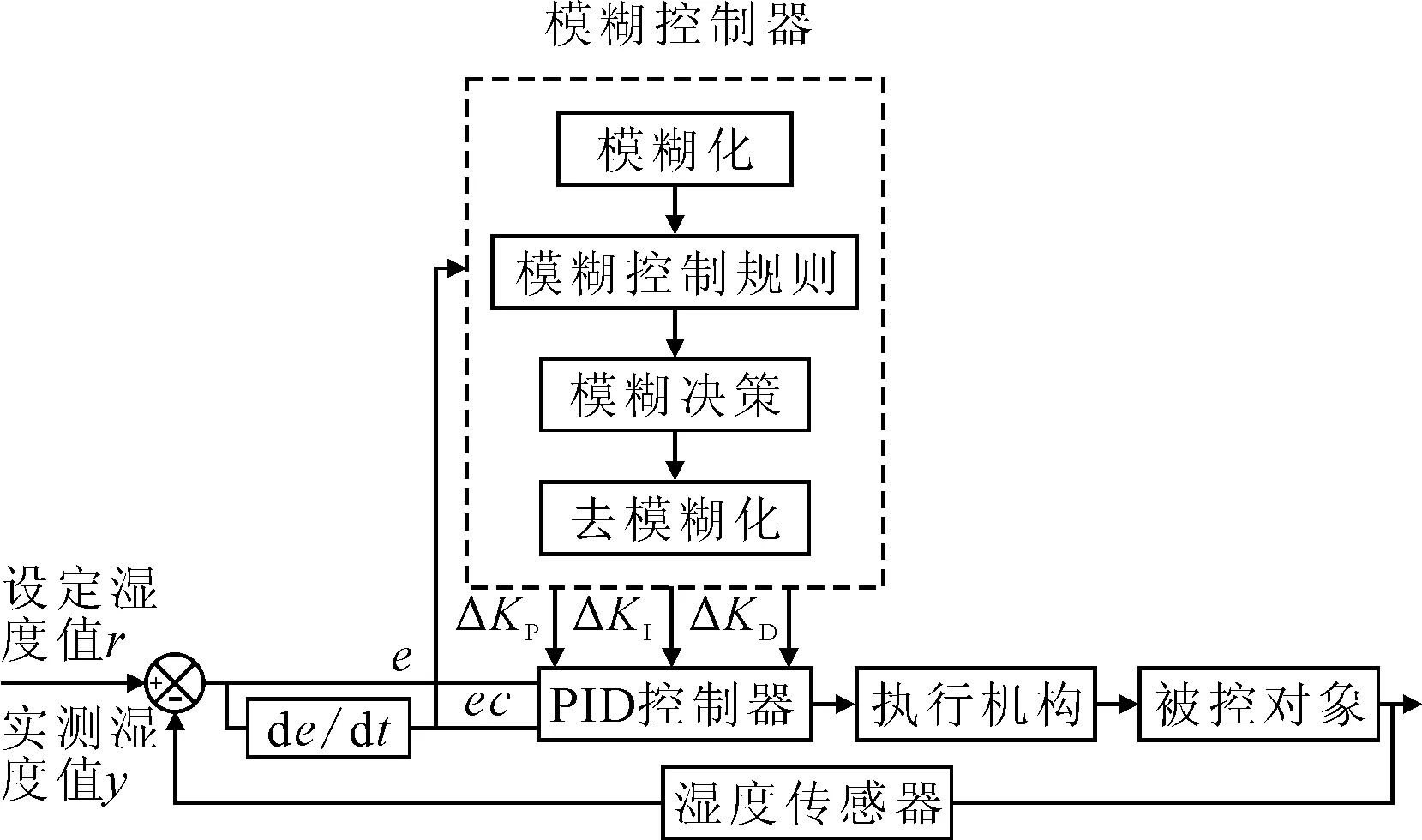
图2 模糊PID控制器结构
模糊PID控制原理是将输入PID控制器的土壤湿度偏差e=r-y和土壤湿度偏差变化率ec=de/dt同时输入到模糊控制器中,模糊控制器分别对比例KP、积分KI、微分KD进行调节,经过模糊化、模糊推理和去模糊化后,得到修正的ΔKP、ΔKI、ΔKD,最终输入PID控制器的实时参数为KP+ΔKP、KI+ΔKI、KD+ΔKD。
2.2 模糊PID控制器隶属度函数设计
考虑到灌溉的控制精度和实际条件,定义土壤湿度偏差e和土壤湿度偏差变化率ec的基本论域为[-3,3];定义e和ec的模糊语言值各有7个:{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,ZO,PS,PM,PB}。定义ΔKP、ΔKI、ΔKD的模糊语言值为{NB,NM,NS,ZO,PS,PM,PB},则其对应的模糊子集论域分别为(-0.3,0.3]、(-0.05,0.05]、(-2,2]。模糊PID控制器的输出为电磁阀的开度,即{关闭、微开、中开、全开},简记为{ZO、PS、PM、PB},对应模糊子集为{0,1,2,3}。e和ec的隶属度函数采用三角形函数,ΔKP、ΔKI、ΔKD的隶属度函数采用高斯函数,其隶属度函数如图3所示。

图3 隶属度函数图
2.3 模糊PID控制器模糊规则设计
模糊控制规则是模糊控制器的核心部分,查阅模糊控制相关文献及PID参数整定的一般规则[11],以及工作人员的实际种植经验,制定了49条模糊PID控制逻辑规则,如表1所示。
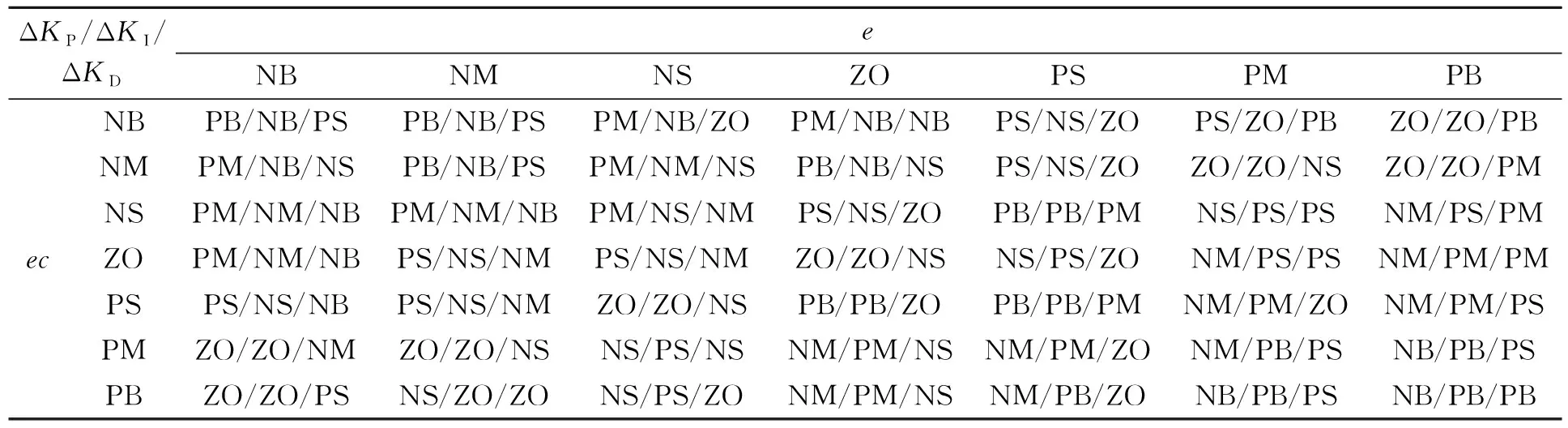
表1 ΔKP、ΔKI、ΔKD的模糊控制规则表
编写好模糊PID控制规则后,可以得到规则生成的三维曲面,如图4所示。

图4 模糊PID控制规则三维曲面
3 模糊PID控制算法仿真与灌溉测试
3.1 模糊PID控制器的Simulink仿真
根据文献资料可知,番茄的最佳生长土壤湿度为55%左右,设置初始湿度值为0,终值为55%的阶跃响应信号为模型的输入信号,由于被控对象是一个复杂的系统,具有响应的滞后性,采用二阶纯滞后模型来近似描述。
为了验证模糊PID控制算法的有效性,运用Simulink对算法进行仿真,其仿真模型如图5所示。
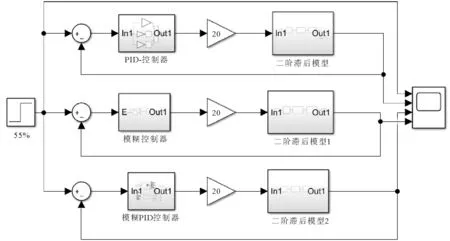
图5 水肥一体化系统灌溉控制算法仿真模型
通过仿真实验不断调整PID控制器的参数值,发现当PID参数值为0.07、0.005、0.08时,系统的控制效果最好,其仿真结果如图6所示。
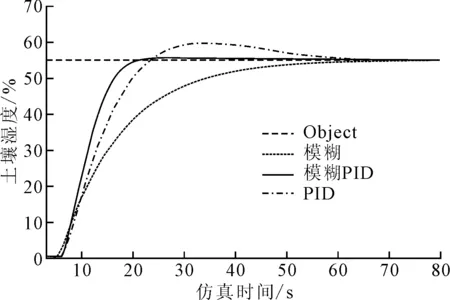
图6 设定土壤湿度为55%的仿真曲线
从图6可知,模糊PID控制比模糊控制具有更快的收敛速度;与PID控制相比,超调量减少了约8.9%,且震荡明显减小;可以看出,模糊PID控制在控制精度和控制的实时性上能够满足控制要求。
3.2 水肥一体化灌溉系统测试与分析
所设计的水肥一体化灌溉系统于2021年11月在某地温室大棚内展开实验测试,如图7所示。
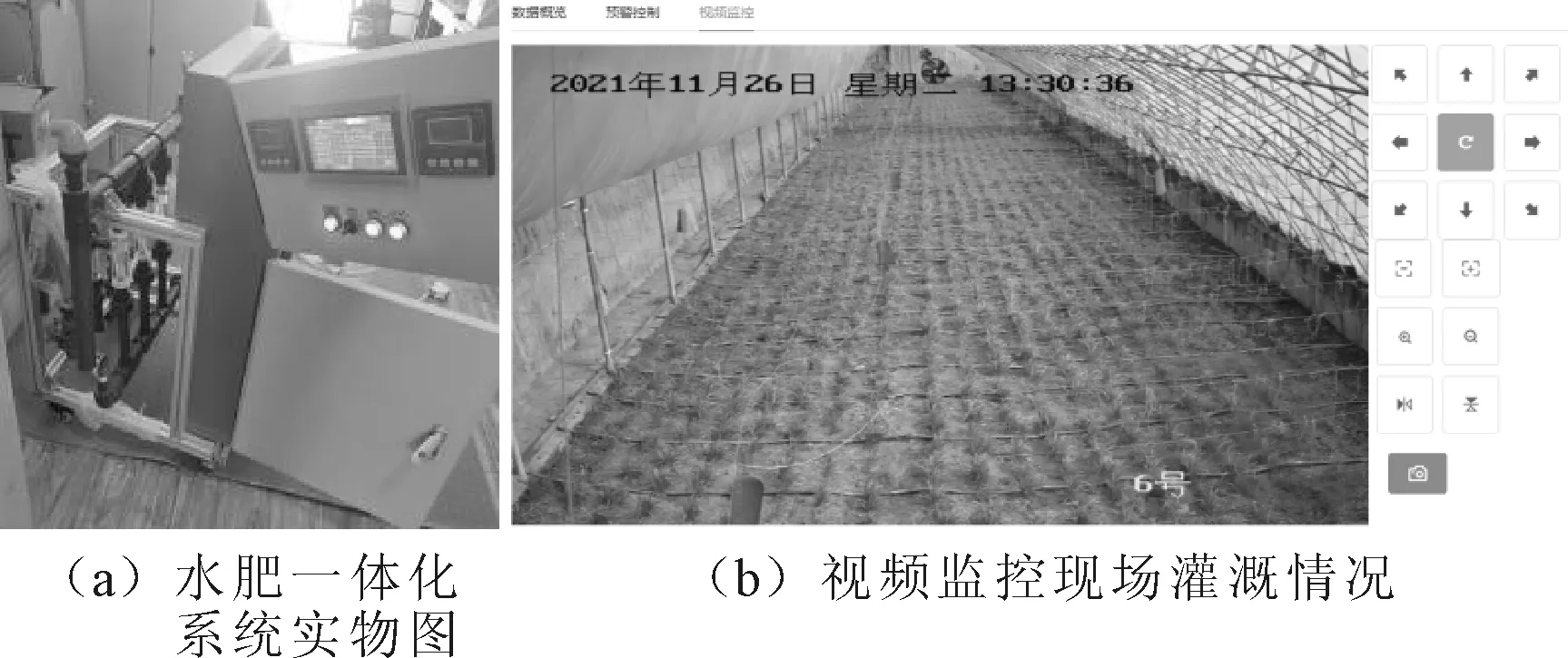
图7 现场灌溉测试图
灌溉测试从11月2日至11月29日,每3天灌溉一次,测试了10组数据。灌溉对象为10亩左右的番茄幼苗,在模糊PID控制策略下完成灌溉,记录10次灌溉的用水量与用肥量,如图8和图9所示。

图8 灌溉用水量
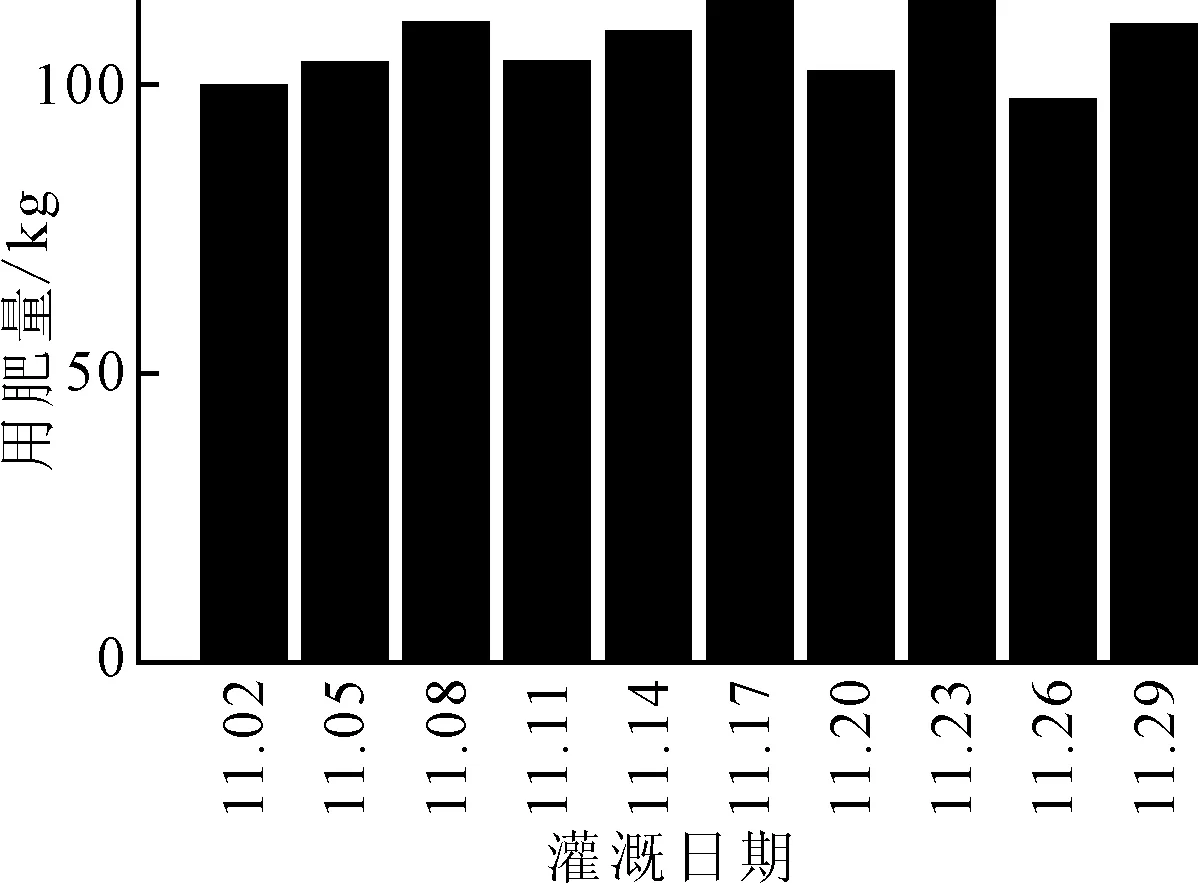
图9 灌溉用肥量
水肥灌溉测试完成后,可以看出每次灌溉大约用水14 t、用肥103 kg,根据以往工作人员灌溉经验以及查阅资料得知,10亩番茄幼苗以传统粗放式灌溉大约需水20 t、需肥140 kg。
经过测试与分析可知,所设计的基于模糊PID控制的水肥一体化灌溉系统与传统粗放式的水肥灌溉相比,节水30%,节肥26.5%,大大降低了农业种植成本,系统不仅在环境保护方面效果明显,而且还节省了人力成本。
4 结论
针对传统粗放式灌溉水肥利用率低的问题,设计了一套基于模糊PID控制的水肥一体化灌溉系统,通过传感器实时采集作物信息,反馈给模糊PID控制器,控制器根据采集的信息进行分析与处理并下达灌溉指令。系统中物联网服务平台能够让工作人员在手机或电脑端进行远程的监测与控制,为农业的发展提供了方便。系统采用模糊PID控制算法控制水肥的灌溉,并进行建模仿真,结果显示系统能很好地将土壤湿度控制在目标范围内,检测土中肥料壤浓度在作物生长所需范围内,能够满足控制精度与控制实时性要求。经过实际测试,所设计的水肥一体化灌溉系统能够满足实际要求,节水、节肥效果显著,具有一定的推广价值。
猜你喜欢
天津农林科技(2020年3期)2020-08-13
湖北农机化(2020年4期)2020-07-24
电子制作(2019年15期)2019-08-27
电子制作(2018年23期)2018-12-26
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年6期)2018-01-19
高原山地气象研究(2016年4期)2016-02-28
高原山地气象研究(2016年4期)2016-02-28
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01