电力工程关于火力发电燃料系统神经元改造方向及应用方式
2023-12-06 01:50张开延
城市建设理论研究(电子版) 2023年33期
张开延
国能长源荆州热电有限公司 湖北 荆州 434000
电力工程与国民经济发展及广大民众的生活息息相关,近几年随着电力泛在物联网的建成,电力工程中扩大了对新材料、新技术、新工艺等资源的优化配置,大幅度提升了此类工程的全要素生产率。当前,正值此类工程高质量建设与高水准运营期间,火力发电厂应结合高质量发展主题持续在技术赋能路径下增强对燃料系统神经元相关技术的探究,并结合其改造方向及应用方式为其实践赋能,促进其向“智慧电厂”的转型。下面先对火力发电燃料系统的构成要素与基本原理做出简要概述。
1 火力发电燃料系统概述
现代火电厂主要由五大系统构成:(1)燃料系统;(2)燃烧系统;(3)汽水系统;(4)电气系统;(5)控制系统。燃料系统作为其中的关键组成部分,使用燃料不同其系统构成要素也存在差异。从火力发电厂的燃料系统看,常用燃料包括煤、石油(以重油、天然气为准),其中煤燃料仍占据主流,设备配置有锅炉、汽轮机、发电机及辅助装置,构成要素分为输煤、磨煤、粗细分离、排粉、给粉、锅炉、除尘、脱硫等。燃料系统运行时先将将燃料运输到锅炉经过燃烧加热水变成蒸汽,使化学能转化为热能后推动汽轮机旋转生成机械能,再带动发电机旋转产生电能等[1]。
2 火力发电燃料系统神经元改造方向
目前,在电力工程关于火力发电燃料系统神经元改造方面,主要围绕“双碳”目标与“智慧电厂”实施,旨在实现节能降耗、提质增效、全天候“无人化”巡检等。从改造方式看,近几年主要是在技术赋路路径下通过配置神经元算法的完成改造。具体改造方向集中在系统化与专项化改造上:(1)以系统化改造为例,主要是对燃料系统工艺进行全面改造,实施时将重点通过提标改造方式应用神经元算法。(2)以专项化改造为例,一般在改造中强调针对各个子系统的智能化改造。例如,在输煤管道、输煤栈桥方面的智能管理系统、在锅炉控制方面的智能PID控制系统等。以后者为例,锅炉中的温度、风量、煤量直接影响其燃料的使用效果,此时实践主体会选择神经元算法中的基本逻辑为其制定适配性较高的完整控制方案。神经元算法如图下图1所示:
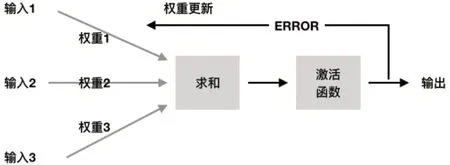
图1 神经元算法示意图
3 火力发电燃料系统神经元应用方式
3.1 项目概况
以某火力发电厂为例,现有660MW(2×330MW)亚临界燃料供热机组,项目正式投产于2009年底。其中了输煤管廊采用输煤栈桥形式,燃料系统采用循环流化床锅炉,控制方式以常用PID控制为主。目前,存在的问题集中表现在两大方面:(1)输煤管廊采用人工巡检作业方式,存在效率低,及时性与安全性差,可靠性、稳定性弱,误报、漏报的问题。(2)应用的循环流化床锅炉,存在控制内扰大、变量匹配法下控制效果差、补偿解耦法下应用数字调节器构造算法困难、PID控制波动大、解耦效果分析差等问题。为了同时解决上述问题,该火力发电厂采用公开招标的方式,向投标者提出了“基于神经元改造的智能巡检机器人”与“基于神经元的PID调节器加静态解耦控制模式”设计及实现要求[2]。
3.2 应用需求
投标单位中标并取得标的后,与该火力发电厂签订了内容完整的合同。作为施工方式的投标单位在履行合同期间,首先结合招标文件、施工合同及相关文献资料,分析了其应用需求。具体如下:(1)以燃料系统为准,针对其中的输煤管廊设计智能循环机器人。(2)针对当前应用的2台330MW机组循环流化床锅炉PID控制模式进行智能化改造。(3)改造过程中,要求采用神经元算法,包括基于人工智能的AI深度学习图像算法、单层神经网络及与之配套的相关技术等。
3.3 技术方案
本次研究根据该项目实际应用神经元的需求,选择了系统化与专项化改造相结合的思路。具体如下:(1)以燃料系统的构成要素为准,针对输煤管廊、燃烧锅炉两个对象实施神经元改造。在前一个方面按照系统性控制要求于“智能管理平台+巡检机器人”框架设计一款智能巡检机器人,在后一个方面根据专项化控制设计“神经元PID调节器+静态解耦”控制模式。(2)在上述技术路线下,分别设计出两套技术方案,最后通过网络通信连接的方式,使其实现关联,最终保障整个燃料系统的智能化控制与智慧化管理。
3.3.1 “智能管理平台+巡检机器人”方案
首先,工作人员在该技术方案下遵循“大平台+小系统”基本框架设计以“设备层-数据采集层-通信层-数据处理层-应用层”为主的系统架构。具体如下:
(1)设备层。可见光相机、红外相机、红外相机、驱动电机、气体传感器、无线网络设备、后台控制服务器、皮带撕裂检测装置、输煤廊道区域布置定点检测装置等。
(2)数据采集层。选择复合事件多源异构数据实时主动处理技术。为了精确感知多种不同传感器可能在短时间内产生大量多层次数据,创新研发复合事件多源异构数据实时主动处理技术。该技术将单一传感器的状态检测作为简单事件,通过逻辑操作和时序操作,将大量不同层次的简单事件融合为复杂事件,从多个维度描述系统的健康状态,实现电气场景设备状态、表计、环境参数等 100%全覆盖。
(3)通信层。选择多组网方式,实施以WiFi、5G、无线电台等多种无线通信方式,实现服务器端与机器人端的实时图像、视频和控制信令的传输。同时,机器人采用多组网方式接收监控后台的控制指令,调用前端机器人进行巡检并正确反馈状态信息,及时上报本体的各类预警和告警信息[3]。
(4)数据处理层。通信层将前端传感器采集的各类信息传输到数据处理层后,数据处理层利用大数据清洗技术与数据引擎存储技术完成对数据的清洗、归一化处理、分类存储并形成相应的数据库。然后,由智能辅控系统应用AI识别算法及大数据技术进行数据深入分析,对设备状态变化趋势进行数据自动诊断,自动进行缺陷录入、生成巡检报告功能。由于智能安全辅控系统提供了REST API、HTTP Client等多种方式的第三方应用标准化数据接口和开发工具,有利于对其进行多系统集成管理,进而使消防系统、门禁系统等电力企业系统实现数据关联及实时联动,实现现场人员对电厂数据便捷稳定的查询和管理等。具体实施时,各子系统采用人工智能神经网络图像算法。具体以基于神经元的人工智能神经网络图像算法为准引入AI深度学习方法(如图2),建立高精度AI识别算法工具库与电力、能源、工业生产等示范项目的数据库,实现字符类、指针类、 状态显示类、开关类、刻度类等多种电力设备检测功能。相比传统图像算法,AI 深度学习图像算法具备自动学习模式特征,可减少人为设计特征造成的不完备性,同时充分采用端到端 的识别方式,适配巡检点位要求,并提升现有巡检速率和准确率。
(5)应用层。主要包括高清数字大屏、PC端、App终端、后台管理平台、燃烧系统管理部门、安全管理部门及相关单位等。应用层主要是通过数据处理层上传的报表完成相应的管理及应用工作。
其次,工作人员按照根据模块化设计思路设置了若干模块,并通过单元技术控制的方法对各个模块进行了构成要素与技术指标设置,旨在保障其方案实施的全面性与可操作性。具体如下:
(1)机器人本体模块:重量不大于70kg,可承载100kg重物,以锂电池供电方式为准,可以通过火力发电厂中设置的固定充电桩进行自动充电,充电时间为4km/h,续航能力为15km,具体行走以设置的钢性轨道为准。行走速度设置为0~1m/s范围内(实际可调),定位精度不大于10mm,最小转变半径为500mm。除上述功能外,还可以通过可见光摄相机、红外热成像仪、清灰装置等完成一系列操作,尤其是云台运动范围实现了360°全覆盖,并且能够在防碰撞功能下完成无障碍运行[4]。
(2)通信模块:根据单个基站覆盖区域情况设置为80m以上,实时传输宽带可达到不小于30Mbps,基站切换时间在50ms以内,丢包率设置为0。
(3)轨道模块:主要采用高强度轻质防腐蚀材料,重量为15kg/m以内,最小变曲半径等R500mm,通过硬质阳极氧化处理后可以在温度为-20~175℃、湿度为0~99%RH、中性盐雾场景中铺设。
除以上模块外,还设置有充电模块、后台控制模块、工作环境模块、皮带撕裂模块、皮带跑偏模块等。实际情况以招标文件要求为准,此不赘述。上述模块应用后可以辅助该火力发电厂完成智能管理平台、巡检机器人之间的信息交换与通信网络功能、机器人自检功能、多场景检测功能、设备状态皮带状态检测功能、测温功能、自主充电功能、防碰撞功能、数据分析功能、系统互联功能等。
3.3.2 “神经元PID调节器+静态解耦”控制模式
工作人员提出了神经元控制(如图3)与静态解耦控制相结合的思路,旨在设计能够解决其一般问题与PID控制器解耦控制问题的控制模式。具体如下:

图3 基于神经元的智能PID控制器模型
假定:(1)PID控制器输入偏差与控制输入在t时间分别为e(t)、u(t),PID控制器比例带、积分时间、微分时间分别为P、Ti、Td。此时常规PID控制算法如下:
按照PID调节律对上式(1)进行离散化表示,算法可写为:
在上图3中,自适应神经元模型为虚框部分,神经元的三个输入状态分别为x1、x2、x3,对应的输入状态权系数分别为w1、w2、w3。假定智能PID控制系统参考输入、被控制过程输出分别为r、y,控制性能测量信号为Z(t),那么在Z(t)取值等于e(t)、神经元比例系数KP已知的情况下,可以得到其智能PID控制器的输出值u(t)如下:
影响上式(4)的主要因素为自学习速率,此时在公式(3)中代入x1、x2、x3的表达式后可得到P、Ti、Td的值,具体表示为。由于权系数是通过自学习获取,此时的PID调节器参数也可能在自主学习方式下得到。
其次,在静态解耦控制方面,工作人员直接选择静态对角矩阵解构网络完成,既能够解决单位解耦网络补偿法应用时的高频作用区间小、作用距离高频远的情况,又能够利用静态解耦阵中的简单结构保障其应用的稳定性。最后,工作人员在“神经元PID调节器+静态解耦”控制模式下,工作人员根据实际情况提出了针对锅炉中的温度、风量、煤量三个控制对象的完整控制方案[5]。
3.4 具体实施
首先,业主对机器人智能管控系统的技术方案审查后,施工单位根据技术方案完成安装、调试、数据分析、系统维护、逻辑优化、调试试运、制定操作规程等一系列工作。具体实施前,施工单位待系统试运通过后,与业主协同合作开展经济性研究和分析工作,确定后根据以下步骤进行实施:(1)开展巡检区域规划,包括现场路线构建、轨道铺设,以及无线网络布设方案规划,充 电位置规划等。(2)搭建巡检服务器,配置后台监控系统及远程集控管理系统,对巡检机器人进行本地管理。(3)现场的建图、设点工作。与运维人员确认检测点,皮带输送区域应根据现场情况与巡 检周期要求设计巡检点位分布与停车点。(4)现场试运行,确保机器人工作正常,识别准确。(5)投入使用。进行运行、维护培训,达到培训要求后投入使用。其次,经过仿真测试后确定神经元PID控制加静态解耦控制模式有效后,按完整控制方案结构进行设置与应用[6]。
4 结束语
总之,新时期的电力工程正在向规模化与功能多元化方向发展,先进技术已成为推动其发展的主要因素。结合上述分析可以看出,火力发电燃料系统构成比较复杂,运行原理相对简单。新时期的基于神经元的改造目标始终集中在节能降耗、提质增效方面,改造方向几乎涵盖了燃料系统节能与管理的各个层面,火力发电厂无论采用系统性改造,还是专项化改造,均建议在具体项目中根据实际燃料系统及运行现状,一方面加强对其改造需求的分析,另一方面遵循思路决定出路的基本原则在技术赋能路径下扩大神经元在其中的应用范围,进而通过提升该系统的全素生产率力使其在安全可靠的运行状态下辅助企业产出综合效益。
猜你喜欢
自然杂志(2021年6期)2021-12-23
英语文摘(2021年8期)2021-11-02
小学科学(学生版)(2021年5期)2021-07-22
军事文摘(2020年14期)2020-12-17
现代装饰(2018年5期)2018-05-26
电源技术(2015年5期)2015-08-22
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
弹箭与制导学报(2015年1期)2015-03-11