PMSM模糊FO-PID型迭代学习转矩脉动抑制
2023-12-01 03:44:22陈志刚郑申文
软件导刊 2023年11期
陈志刚,郑申文,沈 跃
(1.江苏大学 环境与安全工程学院;2.江苏大学 电气信息工程学院,江苏 镇江 212000)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一个多变量、强耦合的非线性系统,被广泛应用于电机驱动[1-2],但其在运行过程中会产生周期性的转矩脉动,使输出转矩平滑性降低,且转矩脉动还会进一步引起转速脉动,导致永磁同步电机负载侧出现机械噪声和震动,从而降低转速跟踪性能[3]。
通常情况下,抑制永磁同步电机的转矩脉动会从电机本体与驱动系统两个方面进行考虑。优化电机本体结构方面只适用于电机设计之初,限制较多,实现复杂、成本较高;驱动系统方面可加入谐波抑制算法进行实现,可移植性强,实现更便捷。
迭代学习控制(Iterative Learning Control,ILC)作为一种针对重复运行系统的前馈控制方法,无需借助被控对象数学模型即可精确跟踪被控对象,抑制给定频率的整数倍转矩脉动,因此受到学者们的广泛关注[4-7]。
由于电机转矩脉动会反映在转子速度上,因此可将控制系统设计在速度环以抑制转矩脉动,通常是在PID 控制器的基础上并联一个迭代学习控制器补偿给定电流,但该方法应用时由于微积分阶次只能为整数,极大限制了调节范围。孙传庆[4]针对该问题引入分数阶微积分理论,设计了分数阶迭代学习控制器(Fractional-order Iterative Learning Controller,FO-ILC),但引入微积分阶次的同时会使参数选取更困难,往往需要设计者依靠专家经验或采用试凑法进行选取。
针对上述问题,本文采用id=0 的矢量控制方式,设计一种将模糊控制与分数阶PID 型迭代学习相结合的控制方法。其中,模糊控制在传统控制理论基础上,通过模糊控制理论模拟人的操作经验与思维方式,对难以建模的复杂对象建立反馈通道和闭环结构进行控制的方法。本文针对迭代学习存在的调节范围有限、参数选取困难等问题,设计模糊分数阶ILC 控制器在线调节控制器参数,提高了系统的抗干扰能力与稳定性。
1 永磁同步电机数学模型
本文忽略磁路饱和、涡流损耗等因素的影响,PMSM 在id=0的矢量控制方式下数学模型为:
其中,ud、uq、id、iq分别为d、q轴定子电压和定子电流的交轴分量,Rs为定子电阻,Ld、Lq分别为d、q轴的等效电感,ωe为电角速度,ωr为机械角速度,np为磁极对数,φf为永磁体磁链,TL为负载转矩,Tem为电磁转矩,J为转动惯量,Bm为粘滞摩擦系数。
由于电机内部磁场中存在逆变器非线性因素、齿槽转矩、死区效应等非理想因素,尤其是在低速运行时会使电机产生周期性变化的转矩脉动,将成为影响电机控制性能的主要因素。
2 迭代学习控制器设计
2.1 控制原理
迭代学习是一种利用先前控制经验和误差,在重复执行任务中学习正确经验,即使不确定模型时也能在极短时间内对重复性扰动实现高性能控制,因此获得了较好的动静态性能[8-11]。迭代学习控制系统框图如图1所示。

Fig.1 Block diagram of iterative learning control system图1 迭代学习控制系统框图
图1 中,Φ(S)为学习增益,uj(t)、uj+1(t)分别为第j次、第j+1 次补偿控制量,r(t)为给定信号,yj+1(t)为第j+1 次运行的输出,ej+1(t)为第j+1 次运行的误差。由图1 可知,迭代学习率为:
为了增强系统的鲁棒性,削弱非周期性扰动的累积效应[1]、减小控制误差,选用带有遗忘因子的PID 型迭代学习控制率。
式中,α为遗忘因子,KP、KI、KD为PID 型迭代学习控制学习增益。当KP、KI、KD不同为零时,可构成P型、PI型、PD型等迭代学习控制算法[1]。由文献[12]可知,误差收敛的充要条件为遗忘因子不大于1。
2.2 FO-PID控制器设计
为提高控制系统的调节范围,改善电机动态性能与稳定性,利用分数阶微积分对外部扰动不敏感的特点,引入分数阶微积分理论,将传统可调节微积分阶次由整数扩展至任意实数。分数阶微积分的定义方法有多种,其中Caputo 定义更适合分数阶微分方程初值问题,因此在控制系统中被广泛使用[13],具体数学表达式如下:
式中,β=m+γ,m为整数,0 <γ≤1,δ<0。
FO-PID 型迭代学习率可表示为:
式中,μ、λ分别为微积分阶次,其中0 <λ,μ<2。
由于FO-PID 将微积分阶次扩展至任意实数,在Simulink 仿真过程中,需要离散化与近似化分数阶微积分系统,目前广泛使用的是薛定宇教授提出的改进Oustaloup 滤波器,相当于在Oustaloup 算法基础上接入一个低通滤波器,以提升曲线的拟合精度[14-15]。图2 为FO-PID 仿真模型图。

Fig.2 FO-PID simulation model 图2 FO-PID仿真模型
由图2 可见,FO-PID 在传统PID 控制的基础上,新增了两个可调参数使调节范围更加灵活,但无法实现参数的自整定,且需要选取的参数由3 个增加为5 个。并且,这些参数主要根据专家经验选择,且属于离线整定,无法动态适应电机运行中状态变化产生的随机扰动。
2.3 复合控制器设计
本文设计的复合控制器是在FO-PID 型ILC 的基础上加入模糊控制,这是基于模糊控制不需要精确的数学模型,根据预先设定好的模糊集动态响应系统变化,以克服FO-PID 控制参数选取困难的问题。并且,相较于FO-PID控制器本文设计的复合控制器对时滞性系统具有良好的自适应能力,具有响应时间更短、抗干扰能力和鲁棒性更强的优势。复合控制器控制框图如图3所示。
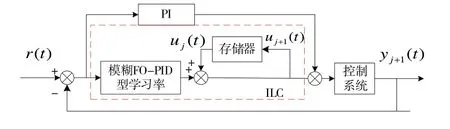
Fig.3 Block diagram of fuzzy FO-PID type ILC controller图3 模糊FO-PID型ILC控制器框图
模糊FO-PID 型ILC 控制算法通过在控制过程中不断检测速度环,计算实际转速与参考转速的偏差与偏差变化率,实时在线补偿调整参数,具体控制结构如图4所示。

Fig.4 Block diagram of fuzzy FO-PID controller图4 模糊FO-PID控制器框图
模糊控制各变量的模糊集为{NB,NM,NS,ZE,PS,PM,PB},分别代表负大、负中、负小、零、正小、正中、正大,模糊控制规则的输入变量e(t)、ec(t),论域为[-6,6],输出变量ΔKP、ΔKI、ΔKD的论域为[-3,3],输出变量λ、μ的论域为[0,1][16-17]。
模糊控制规则库是设计者根据自身经验或借鉴专家经验所建立的模糊控制规则表,通过分析控制对象与各种隶属函数特性,选择S 型隶属函数作为取值偏大侧PB 和偏小侧NB 的隶属函数,选择三角形型隶属函数作为中间侧的隶属函数,利用Simulink 进行仿真建模如图5所示。

Fig.5 Simulink model of fuzzy FO-PID controller图5 模糊FO-PID控制器Simulink模型
3 系统仿真与分析
为了验证本文所提控制方法的有效性,利用Simulink环境建立PMSM 矢量控制仿真模型,电机参数如表1所示。

Table 1 Parameters of permanent magnet synchronous motor表1 永磁同步电机参数对照表
为了更直观地观察控制器的控制作用,给定转速为300 r/min,定初始负载转矩TL=4 N·m,在不改变控制器参数的情况下,在t=0.2 s时将负载转矩突加为8 N·m,通过仿真观察3 种控制算法的转速响应,如图6 所示。由此可见,模糊FO-PID 型ILC 控制策略相较于其他两种控制方式,响应速度更快,在加载后超调量更小,在短时间内能达到稳定状态并且对转速跟踪效果良好。

Fig.6 Rotational speed response simulation curve图6 转速响应仿真曲线
接下来,仍给定转速300 r/min,初始空载运行,在t=0.2 s 时突然增加8 N·m 的负载,通过仿真对比3 种控制算法的转矩响应,如图7 所示。由此可见,模糊FO-PID 型ILC 控制算法相较于其他两种控制方式,抑制转矩脉动具作用良好,证明了本文所提控制策略的有效性。

Fig.6 Torque response simulation curves图7 转矩响应仿真曲线
4 结语
本文针对永磁同步电机转矩脉动问题进行研究,在迭代学习控制的基础上提出FO-PID 型迭代学习控制算法,并引入模糊控制理论设计了模糊FO-PID 型迭代学习控制器,从而实现了对控制器参数的在线调节。
此外,在Simulink 环境下构建了永磁同步电机控制系统,实验表明本文所提控制方案能有效提高控制系统的收敛速度与稳定性,抑制转矩脉动的效果明显。
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28 08:44:04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28 08:44:04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28 08:43:56
制造技术与机床(2017年6期)2018-01-19 02:41:07
光学精密工程(2016年3期)2016-11-07 09:03:49
中学数学杂志(高中版)(2016年1期)2016-02-23 23:08:03
电源技术(2015年9期)2015-06-05 09:36:06
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54