无人驾驶汽车变速器换挡过程自适应控制方法研究
2023-12-01 09:34:46张斌
环境技术 2023年10期
张斌
(上海工商职业技术学院 智能制造与汽车学院,上海 201806)
引言
无人驾驶汽车作为未来交通系统的重要组成部分,能够实现高效、安全、节能的行驶,对于提升交通安全水平、缓解城市交通压力、提高出行效率等方面具有重要意义[1]。无人驾驶是汽车行业未来发展的主要方向之一,具有传统有人驾驶不具备的优势,理论上能够极大避免人为因素引发的交通事故。无人驾驶实现的关键就是如何实现对汽车进行高精准的智能化控制,让其可以像人一样灵活操作汽车行驶[2]。速度控制是无人驾驶汽车控制研究中的重点项目之一,速度控制直接关系到无人驾驶汽车的安全性,当车辆行驶过程中遇到行人或者障碍物或者转弯或者上下坡等情况时,都需要通过变速器换挡操作来 调节车辆行驶速度,以保证车辆的平稳、安全运行,在传统汽车中,这一换挡过程主要通过驾驶员来实现,而无人驾驶汽车则需要通过控制器来替代驾驶员来完成该操作,因此对控制器的控制要求较高[3]。
在上述背景下,变速器换挡过程控制作为无人驾驶中的关键问题,相关领域研究学者纷纷对此做出了研究。代青林等[4]在其研究中以双离合自动变速器为对象,首先对其工作原理进行了分析,然后建立该变速器的动力模型,最后设计鲁棒控制器,对变速器换挡进行控制,调节车辆运行速度。该方法能够提高系统的稳定性和鲁棒性,但换挡精准度较差。刘永刚等[5]以双离合器自动变速器为研究对象,首先根据变速器历史运行数据建立知识库,然后通过非线性自回归网络模型对车辆的运行换挡数据进行学习,得到换挡控制规律,最后设计一种MPC 控制器,结合控制规律,实现换挡控制。该方法能够适应非线性系统的动态变化,但换挡控制稳定性较差。赵屹东等[6]在其研究中针对变速器机构组成以及换挡原理进行了具体分析,然后提出一种全线控电动换挡控制方案,实现换挡控制。该方法变速器的机构组成和换挡原理进行了详细的分析,但对技术和设备有较高的要求,实施难度较大。
针对上述问题,研究一种无人驾驶汽车变速器换挡过程自适应控制方法。
1 无人驾驶汽车变速器换挡过程自适应控制
无人驾驶汽车的行驶速度直接受变速器换挡控制的影响,因此准确的换挡控制可以实现实时的速度调节[7]。本研究设计一种自适应控制方法来实现无人驾驶汽车的变速器换挡过程。该方法主要包括两个关键部分:无人驾驶汽车换挡信息采集与处理研究以及无人驾驶汽车变速器双同步换挡控制方法研究。下面将针对这两个部分进行详细分析。
1.1 无人驾驶汽车换挡信息去噪
无人驾驶汽车变速器换挡过程自适应控制需要以换挡控制信息为基础,将换挡控制信息输入到控制器当中,通过控制器当中的控制策略输出控制参数,实现变速器的换挡控制[8]。无人驾驶汽车换挡控制信息采集和去噪是十分重要的。无人驾驶汽车换挡信息包括两种,即换挡电机转速信息以及换挡电机转矩信息。换挡电机转速的作用是改变换挡前后车辆的行驶速度[9]。换挡电机转速以及转矩与预期车速下的转速、以及转矩差值为控制方程的输入,通过计算输出变速器的控制变量,实现无人驾驶汽车变速器换挡过程自适应控制。针对换挡电机转速信息和转矩信息,利用转速传感器和扭矩传感器完成信息采集:
1)转速传感器
在变速器控制下,换挡电机发生转动。随着转动,转速传感器采集与旋转频率相关的脉冲信号,从而达到换挡电机转速信息采集目的。
2)扭矩传感器
当换挡电机工作时,扭矩传感器上的花键和键槽之间的相对位移量,会随着换挡电机的扭转力矩发生改变,从而带动磁感强度发生改变,最后通过线圈转化为电信号输出[10]。
针对采集到的转速和转矩信号,利用小波阈值法进行滤波。具体过程如下:
步骤1:输入采集到的换挡电机转速或转矩信号,记为A(t)。
步骤2:设置滤波参数,即小波基函数(Marr)和分解层数N。
式中:
ψ(t)—Marr小波基函数。
步骤3:利用ψ(t)对A(t)分解,分解为设置的N层,得到每层分解系数aj,k(t)。
步骤4:利用阈值函数进行信号滤波,即
式中:
bj,k(t)—去噪后的第j层第k个小波系数;
Bj—第j层滤波阈值;
sign ()—阶跃函数。
步骤5:重构,得到去噪后的A(t),记为C(t)。
通过对转速和转矩数据进行小波阈值滤波,可以减少噪声对后续过程的干扰,并提供更加准确和可靠的输入数据。这将有助于提升换挡过程的自适应控制效果,使得变速器能够更精确、平稳和快速地进行换挡操作。
1.2 变速器双同步换挡自适应控制方法设计
无人驾驶汽车由于缺乏驾驶员的参与,换挡这一复杂的过程需要汽车自带的控制器来完成。无人驾驶汽车变速器控制的目的是:让换挡操作正确、平稳、迅速,使得变速器运行参数达到预期水平[12]。变速器在换挡过程中的精准控制。直接关系到无人驾驶汽车的行驶质量。在传统的控制方法中,通常使用一种换挡信息来设计控制策略或者采用多种独立的换挡信息来进行分别控制。然而,这些控制方法都缺乏自适应性、及时性和准确性。因此,为了解决这个问题,本研究提出了一种变速器双同步换挡自适应控制方法,其控制原理如图1所示。
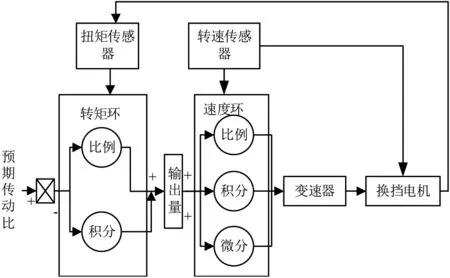
图1 变速器双同步换挡自适应控制原理
从图1中可以看出,该控制器分为内外双环,用于变速器双同步控制。根据输入的换挡控制信号的不同,内环命名为速度环,外环命名为转矩环,用于控制变速器参数,也就是变速器传动比控制[14]。变速器传动比也称速比,是指输入轴转速与输出轴转速之比,是变速器控制换挡电机转速和转矩、改变无人驾驶汽车行驶速度的关键参数。下面进行具体分析。
1)速度环计算
速度环:就是以采集到的实际换挡电机转速数据为输入的控制环,它以外环转矩环的控制输出充当预期转速,计算与实际转速之间的差值,即
式中:
ΔV(t)—转矩环的控制输出与换挡电机实际转速之间的差值;
P(t)—转矩环的控制输出;
V(t)—换挡电机实际转速[15]。
以ΔV(t)为输入,利用PI控制器进行输出变速器传动比。PI控制器方程如下:
式中:
D(t)—PI控制器输出,即变速器传动比;
τ(t)—PI控制器的超前时间常数;
Kp—比例系数;
g—拉普拉斯变换参数;
Ki—积分系数。
2)转矩环计算
转矩环:就是以采集到的实际换挡电机转矩数据为输入的控制环,以预期转矩与实际转矩之间的差值为输入,即
式中:
Δe(t)—预期转矩与实际转矩之间的差值;
R(t)—换挡电机的预期转矩;
—换挡电机实际转矩。
根据Δe(t),其PID控制律如下:
式中:
P(t)—PID控制器输出,也是速度环的输入;
Ti—积分常数;
Td—微分常数。
经过内外环的双同步换挡自适应控制,得出了变速器的控制量,即传动比。除了控制量的求取外,控制时序设置也是非常重要的,这直接关系换挡切换的效率[16]。表1为变换器启停控制规则表。

表1 变换器启停控制规则表
设定变换器启停控制规则表可以根据特定的运行条件和需求,合理地控制变速器的启停操作,从而提高运行安全性、能源效率和系统稳定性,以及保证整个控制过程的顺畅和可控性。
2 实验测试与结果分析
2.1 实验设置
为测试所设计的自适应控制方法在变速器换挡控制中的应用效果,选择一台配备电机和变速器的无人驾驶汽车作为实验设备。连接转速传感器和扭矩传感器到电机,以确保传感器读取到准确的转速和转矩信号。为了实施控制算法并记录实验数据,使用PI控制器,在控制器上加载并运行自适应控制算法和小波阈值滤波算法的测试软件程序。转速传感器和扭矩传感器在汽车中的位置介绍如图2所示。

图2 转速传感器和转矩传感器在汽车中的位置介绍
设置实验参数,如表2所示。
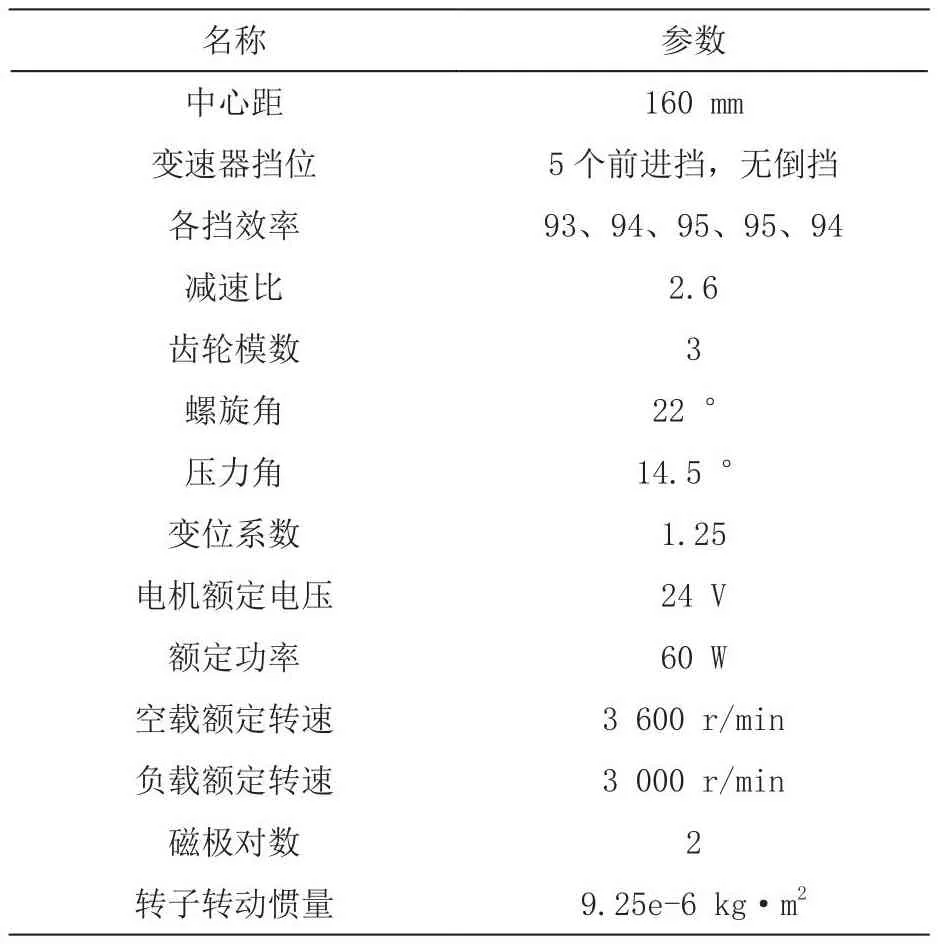
表2 测试环境参数表
2.2 实验目标
1)比较使用小波阈值滤波前后的转速和转矩信号的噪声抑制效果。
2)比较使用变速器双同步换挡自适应控制方法前后的换挡过程中传动比的调整效果。
3)比较本研究提出的自适应控制算法与其他三种传统控制方法在换挡冲击度和换挡时间上的控制效果。
2.3 实验过程
2.3.1 滤波处理实验
将转速传感器和扭矩传感器安装到电机上,用于实时采集转速和转矩数据。针对转速和转矩信号,设计并实现小波阈值滤波算法,将原始信号进行滤波处理。利用测试软件程序进行滤波测试,并绘制滤波前后的对比图,如图3、图4所示。
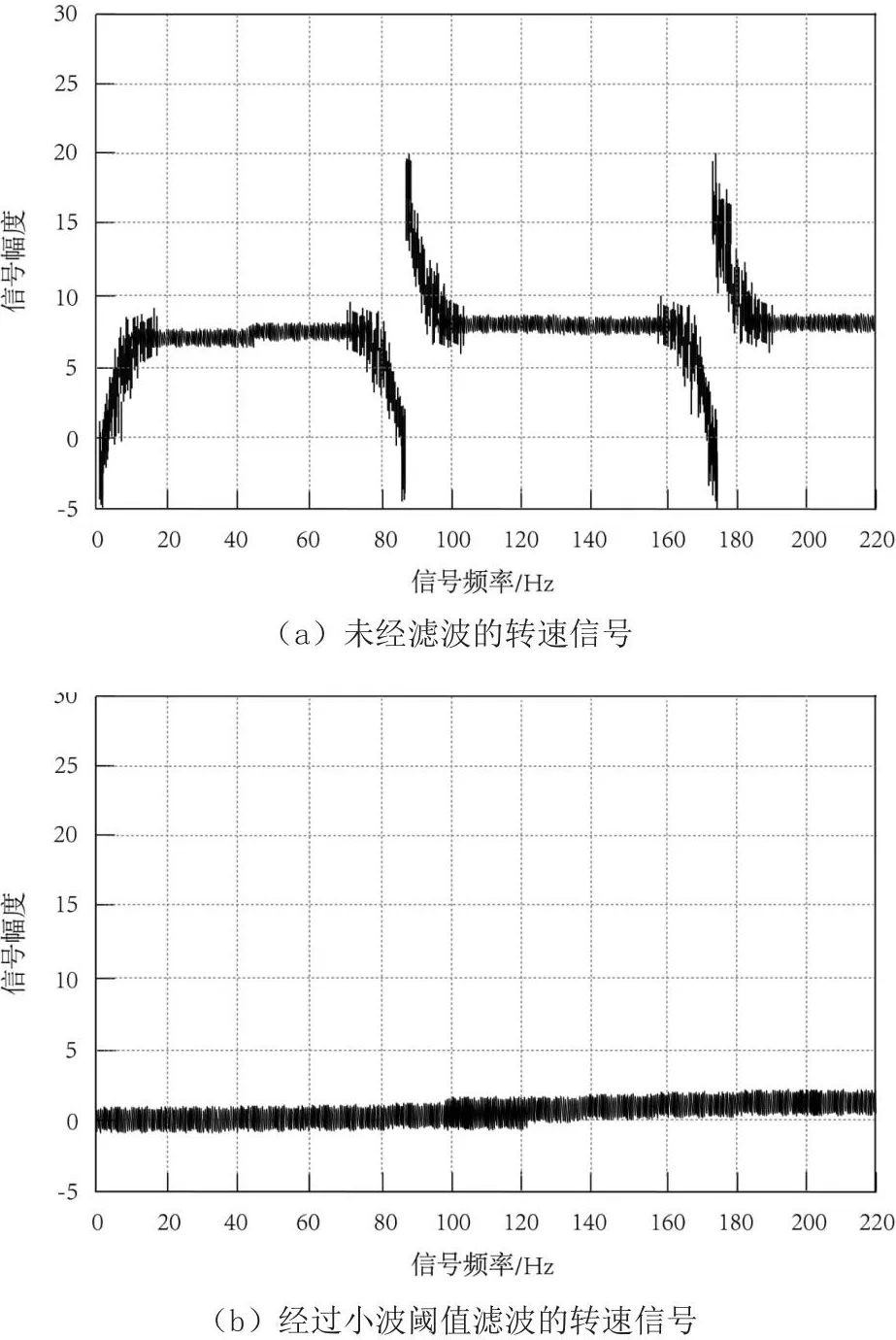
图3 转速信号滤波前后对比图
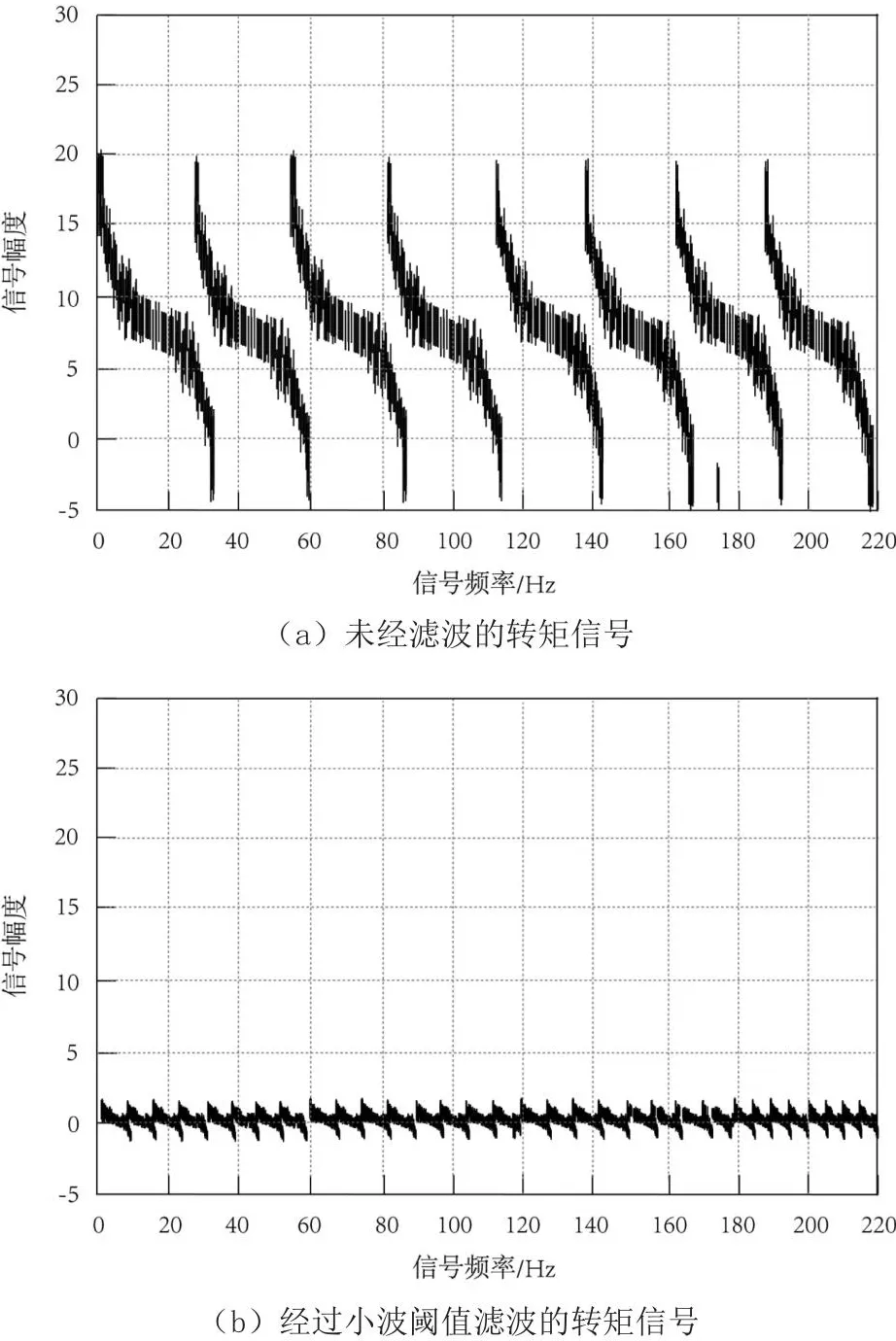
图4 转矩信号滤波前后对比图
比较滤波前后转速和转矩信号的噪声抑制效果可以通过观察滤波前后信号的稳定性和平滑程度来评估。
对于转速信号,滤波前的原始信号可能会受到多种噪声的影响,如电磁干扰、机械振动和采样误差等。这些噪声可能导致转速信号的剧烈波动和不稳定性。然而,通过小波阈值滤波后,滤波器能够识别并消除其中的噪声成分,使转速信号更加平稳和可靠。这意味着从滤波后的转速信号中,可以更精确地获取到车辆实际的运行状态。对于转矩信号,滤波前的原始信号可能存在由于测量设备、传感器故障或环境因素引起的噪声。这些噪声会导致转矩信号的波动和抖动,影响对车辆动力输出的准确评估。通过小波阈值滤波后,本文设计的滤波器能够有效地消除转矩信号中的噪声成分,使信号更加平滑和稳定。这有助于提高对车辆实际扭矩输出的测量精度。这为后续的控制算法和变速器换挡自适应控制方法的实施提供了更可靠的基础,并有助于实现最优的车辆运行性能。
2.3.2 升降档工况自动化测试实验
根据实验目标中的需求,比较控制系统在自适应控制方法前后的换挡过程中传动比的调整效果。进行升档工况实验:将无人驾驶汽车从1档升到5挡,记录实验数据包括转动比、时间等,并绘制换挡过程中实际传动比变化情况图,如图5所示。
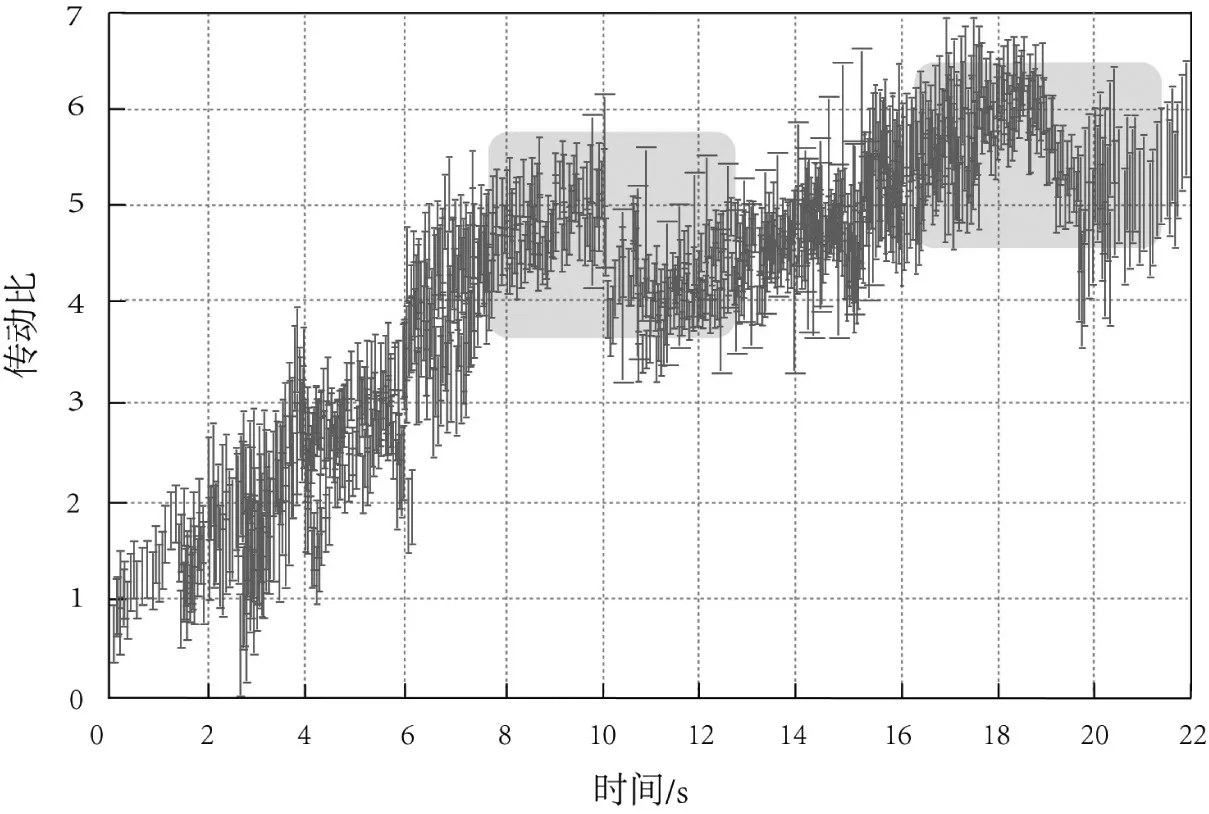
图5 升档过程中的实际传动比变化情况图
图5展示了在升档过程中,实际传动比随时间的变化趋势。通过该图,可以观察到在升档过程中,实际传动比是随着换挡动作的进行而逐步调整的。
进行降档工况实验:将无人驾驶汽车从5档降到1挡,记录实验数据包括转动比、时间等,并绘制换挡过程中实际传动比,如图6所示。
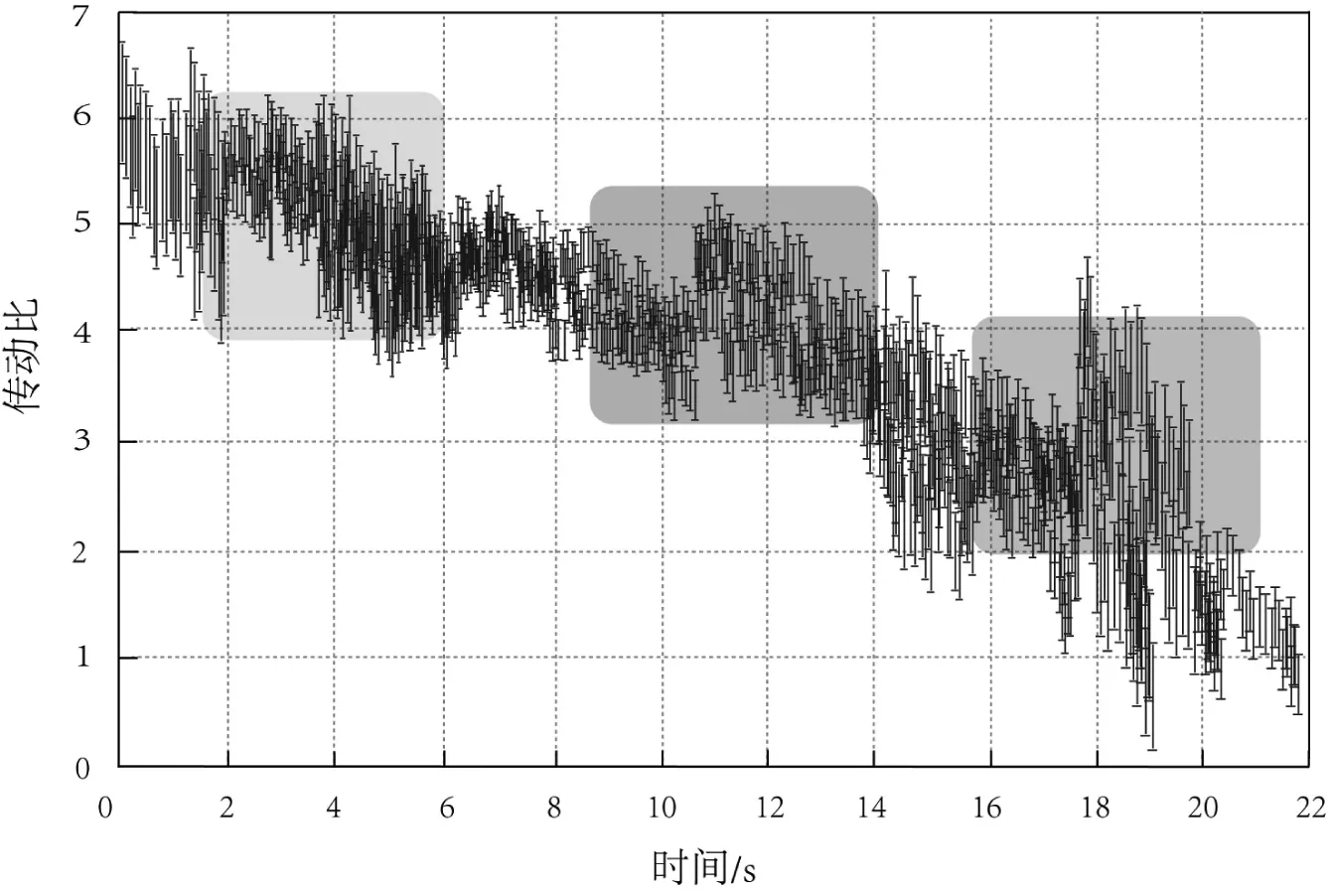
图6 降档过程中的实际传动比变化情况图
图5和图6中观察到一些阴影区域,这些阴影区域代表了传动比波动幅度较大的阶段。这种传动比波动可能是由以下几个因素导致的:首先,在不同的驾驶工况下,如急加速或爬坡等,车辆的动力需求会发生变化,这导致传动比需要进行相应的调整。其次,换挡控制系统中的传感器和执行器存在一定的反馈延迟,这意味着传动比的调整可能会受到一定的时间滞后影响。
通过使用自适应控制算法,在变速器换挡过程中,绘制预期传动比曲线和实际传动比曲线,以评估控制算法的性能。预期传动比曲线代表了在理想的换挡过程中预期的传动比变化趋势,如图7所示。应用自适应控制算法后,绘制了经过滤波和调整的实际传动比曲线,如图8所示。通过对比预期传动比曲线和自适应控制算法应用后的实际传动比曲线,可以评估控制算法在换挡过程中的效果。

图7 换挡过程中预期传动比变化情况图
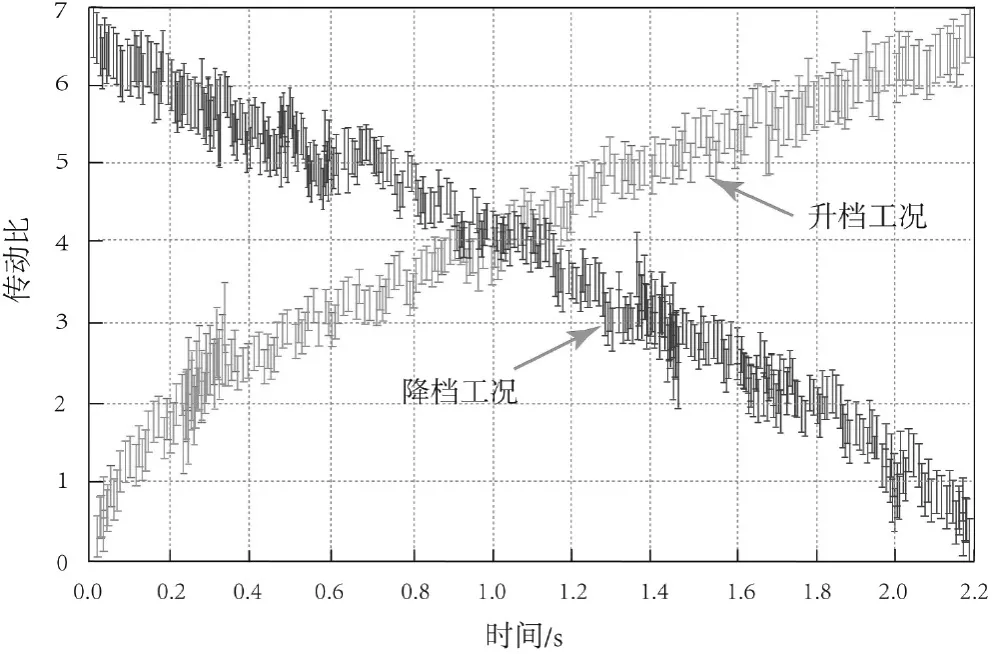
图8 应用自适应控制算法后传动比变化情况图
通过比较实际传动比与预期传动比的变化趋势,评估自适应控制算法对变速器换挡的控制效果。在升档和降档两种工况下,应用本研究提出的自适应控制算法后变速器换挡过程实际传动比与预期传动比十分接近,说明所研究方法引用于控制系统的响应性和准确性较高,能够根据车辆行驶状态和驾驶需求对变速器进行准确调控。同时说明该方法能够根据车辆的运行状态和驾驶需求,自动调整变速器的传动比,以实现最优的车辆运行性能。
2.3.4 对比分析实验
换挡技术要求可归纳为六个字:正确、平稳、迅速,因此从这三个方面进一步分析所提方法的控制质量。其中,针对正确性选择决定系数作为评价指标,针对平稳性选择换挡冲击度作为评价指标,迅速选择换挡时间作为评价指标。
1)换挡冲击度
式中:
H—换挡冲击度,该值越小,证明模型控制下,变速器换挡控制越平稳;
a—加速度;
t—时间。
从图6和表3中可以看出,与三种传统控制模型相比,所提方法应用下,决定系数更高,换挡冲击度更小,换挡时间更短,由此说明所提方法的控制效果更好,能够让变速器换挡过程中更加准确、平稳和快速。

表3 换挡冲击度和换挡时间对比表
3 结束语
无人驾驶汽车的出现在很大程度上弥补了传统汽车存在的缺陷,但是无人驾驶汽车也存在需要改进的问题,其中变速器在换挡过程中的控制就是之一。变速器在换挡过程中的控制直接关系到无人驾驶汽车的速度调节质量。为此,研究一种无人驾驶汽车变速器换挡过程自适应控制方法。该研究中的主要成就为设计了一种双同步换挡自适应控制模型,通过内外双环的控制,使得变速器换挡任务完成度更高。最后对所研究方法进行应用测试,通过决定系数、换挡冲击度以及换挡时间三个指标对比,证明了所研究方法控制实现了变速器更加正确、平稳、迅速的换挡。
猜你喜欢
机械设计与制造(2021年7期)2021-07-26 03:11:34
电子测试(2018年15期)2018-09-26 06:01:04
制造技术与机床(2017年6期)2018-01-19 02:41:07
潍坊学院学报(2017年2期)2017-04-20 08:44:17
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
电源技术(2015年9期)2015-06-05 09:36:06
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:40