
模糊PI永磁同步电机矢量控制系统研究
2023-11-30 22:03:40张威徐建郭锦越黄营
无线互联科技 2023年18期
张威 徐建 郭锦越 黄营
作者简介:张威(2000— ),男,江西宜春人,硕士研究生;研究方向:永磁同步电机控制。
*通信作者:徐建(1981— ),男,湖北英山人,副教授,博士;研究方向:嵌入式系统与智能控制。
摘要:针对永磁同步电机(PMSM)使用的传统PI控制在多工况下易出现超调、响应速度不高、鲁棒性不足的现象,提出在PMSM双闭环矢量控制系统的传统转速PI控制器中加入模糊控制,使系统根据PMSM的期望转速与实际转速之间的误差和误差导数实时调整PI参数,从而让系统在不同工况下仍保持较小超调以及良好的控制精度和鲁棒性能。文章在Simulink搭建模糊PI控制的PMSM双闭环矢量控制系统仿真模型,并与传统PI控制在多工况下相比较分析。仿真实验的结果证明:模糊PI控制的PMSM矢量控制系统较传统PI控制能减小超调,加快响应速度,增强鲁棒性能。
关键词:永磁同步电机;模糊控制;Simulink;PI控制
中图分类号:TP39 文献标志码:A
0 引言
永磁同步电机(PMSM)具有体积较小、效率密度高、电磁转矩大等特点,被广泛应用在医疗设备和汽车等多个领域[1-2],但随之而来的是对其动静态性能要求愈加苛刻[3]。PMSM通常在突变负载或突变转速的条件下工作,这对PMSM提出了超调量、响应速度、鲁棒性等方面的要求。传统PI控制具有结构简单、稳态下无静态误差等特点[4-6],但同时也存在很大的缺陷。由于PMSM系统的动态性能和控制精度深受外界扰动和PMSM运行时内部参数变化的影响,传统PI控制因PI参数是固定不变的,在多工况下易出现超调、响应速度慢、鲁棒性不足和系统调节时间过长等现象,满足不了PMSM在当前应用环境的控制精度需求[7]。为了应对上述存在现象,本文应用了传统PI控制与模糊控制相结合的转速控制器,使系统可以根据PMSM期望转速与实际转速之间的误差和误差导数实时调整PI参数,从而让系统在不同工况下仍保持较小超调以及良好的控制精度和鲁棒性能。
1 永磁同步电机矢量控制
在建立PMSM模型之前,需进行下列假设来简化模型:不计PMSM中铁芯饱和;PMSM定子绕组中通入三相对称正弦波电流;忽略PMSM内部磁滞损耗以及涡流影响。为了方便后期PI控制器的设计,基于双轴理论,通过Park变换,将其PMSM数学模型由ABC自然坐标系转换到d-q同步旋转坐标系,使PMSM的数学模型更好完成解耦合降阶。
d-q同步旋转坐标系下电压方程:
Ud=RId+ddtψd-ωeψq
Uq=RIq+ddtψq+ωeψd(1)
將磁链方程代入式(1)可得:
Ud=RId+LdddtId-ωeLqIq
Uq=RIq+LqddtIq+ωeLdId+ωeψf(2)
Ud、Uq为d-q旋转坐标系下PMSM定子电压分量;ωe为电角速度。从式(2)中不难看出,Ud、Uq分别同时受Id、Iq的作用,这表明Ud、Uq存在一种耦合关系,且随着PMSM的转速升高,式(2)中的耦合项的值也随之增大,这导致难以单独控制电机的Ud、Uq,因此本文采用Id=0的控制策略用来消除这种影响。
PMSM电磁转矩方程:
Te=1.5P0Iq[Id(Ld-Lq)+ψf](3)
P0为PMSM极对数。从式(3)可以看出,对于输出给定转矩,就需要控制Id、Iq的大小。当采用Id=0的控制方法时,Iq与Te成线性函数关系,q轴的电流分量全部用来生成电磁转矩[8]。基于Id=0的控制策略,搭配空间矢量脉冲宽度,调制(SVPWM)搭建的模糊PI控制的PMSM双闭环矢量控制系统,如图1所示。
2 模糊PI控制器
模糊控制器以PMSM的期望转速与实际转速之间的误差E和误差导数EC作为输入,经过模糊化、模 糊推理和反模糊3部分处理,输出转速环PI参数的调整量ΔKp、ΔKI。PMSM控制系统的转速环模糊PI控制器原理结构如图2所示。
2.1 模糊化
将PMSM矢量控制系统的期望转速与实际转速之间的误差E、误差导数EC和PI参数调整量ΔKP、ΔKI的模糊子集按照{NB,NM,NS,ZO,PS,PM,PB}划分,7个子集分别代表:负大、负中、负小、零、正小、正中、正大。
模糊PI控制器的转速误差E和转速误差导数EC均为精确量,而模糊控制器内部模糊推理部分使用的是模糊量。现设PMSM转速误差E和转速误差导数EC的基础论域为[-XE,+XE]、[-XEC,+XEC];模糊子集的论域为[-OE,+OE],[-OEC,+OEC];输出的转速PI控制器参数调整量ΔKP、ΔKI的基础论域为[-YP,+YP]、[-YI,+YI];模糊子集论域为[-ZP,+ZP]、[-ZP,+ZP]。选择适当的量化因子KE、KEC来完成PMSM转速误差E、误差导数EC从基础论域到模糊论域的转化,如式(4)和式(5)所示:
OE=KE×XE(4)
OEC=KEC×XEC(5)
2.2 模糊推理
模糊控制规则是根据KP、KI参数对整个PMSM控制系统性能的影响,结合专家调节经验,经过大量仿真实验,以PMSM期望转速与实际转速之间的误差E和误差导数EC来选择PI参数补偿量ΔKP和ΔKI。ΔKP和ΔKI模糊控制规则如表1所示。
2.3 反模糊
通过选择适当的比例因子KUP、KUI来完成PI参数调整量ΔKP、ΔKI由模糊论域到基础论域的转化,如式(6)和式(7)所示:
YP=KUP×ZP(6)
YI=KUI×ZI(7)
随后进行反模糊处理,本文采用重心法,将模糊调整量转变为精确值,重心法的公式为:
Z=∑ni=0ZmZ(i)Z(i)(8)
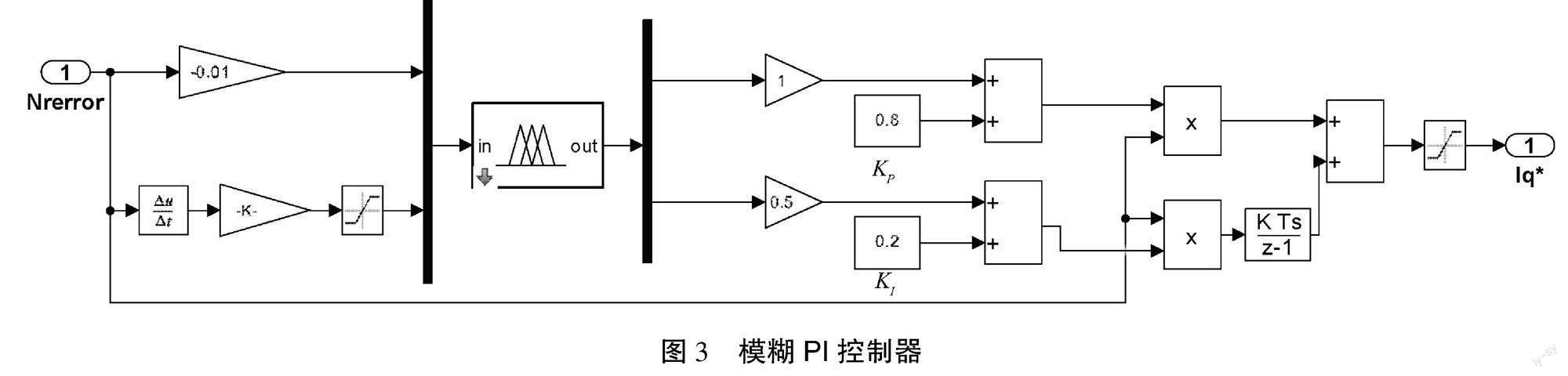
式(8)中Zm是各组元素占比,Z(i)为输出的模糊量ΔKP、ΔKI。Z是反模糊后模糊PI控制器输出的精确值。经反模糊处理所输出的ΔKP、ΔKI精确值与系统整定的PI参数相加,即为下一采样周期的PI参数。综上所述,在Simulink搭建的PMSM双闭环矢量控制系统的模糊PI控制器如图3所示。
3 PMSM系统仿真结果
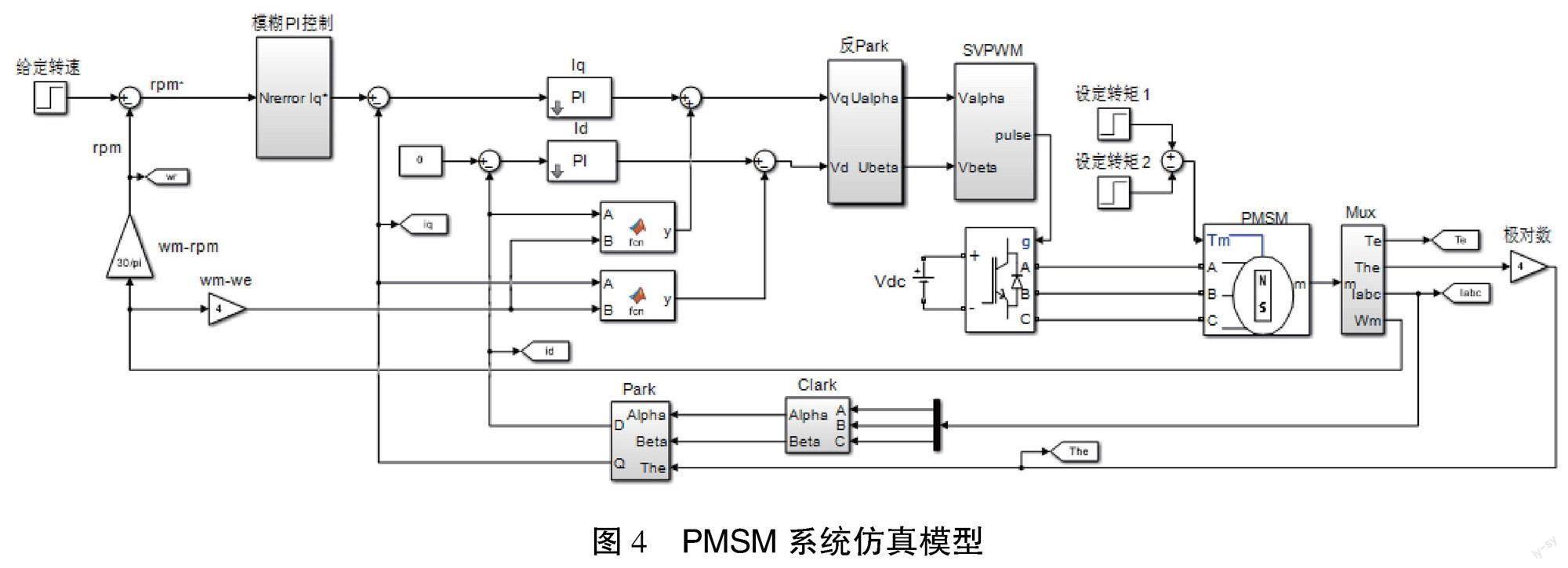
本文在MATLAB/Simulink搭建了模糊PI控制的PMSM矢量控制系统仿真模型,如图4所示。其中,凸极式PMSM的参数为:定子相电阻R=0.948 Ω;d-q轴电感Ld=14 mH,Lq=5.45 mH;PMSM的极对数为4。三相逆变器端电压为311 V;采样周期Ts=0.000 01 s;仿真时间为0.3 s。
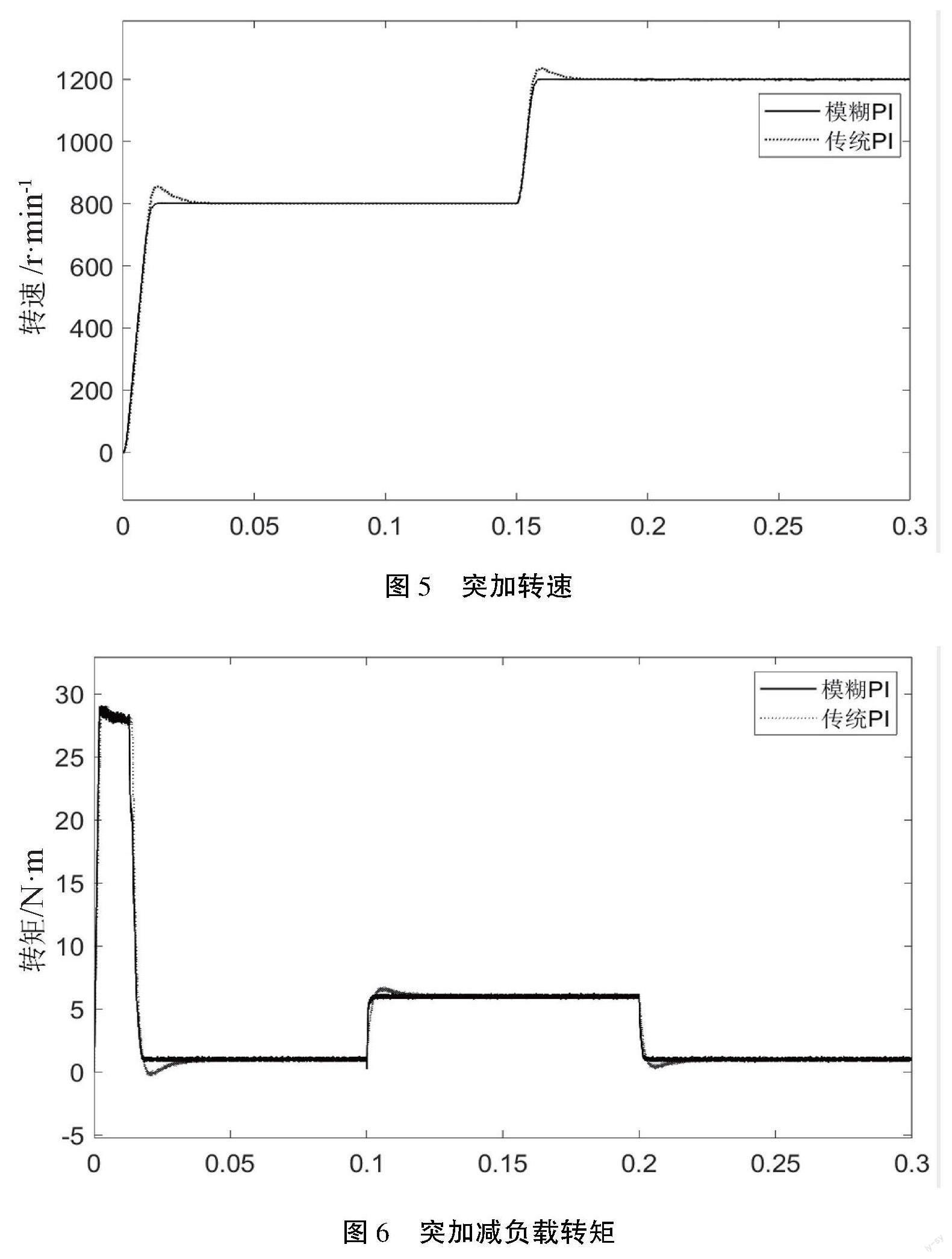
下面分别模拟PMSM加速和突加减负载工况,如图5所示是PMSM在0.15 s由给定转速800 r/min加速到1 200 r/min的波形;如图6所示是PMSM初始给定转速1 200 r/min,在0.1 s突加负载转矩5 N·m,在0.2 s突减负载转矩5 N·m波形。
图5中,PMSM空载启动后,在加速工况下模糊
PI的PMSM矢量控制系统较传统PI控制到达指定转速的调节时间更短,超调更小。图6中,PMSM在突加减负载转矩时,转矩超调更小,响应速度更快。上述表明:模糊PI控制的PMSM较传统PI控制能减小超调、加快系统响应以及增强系统鲁棒性能。
4 结语
本文基于PMSM的d-q同步旋转坐标系数学模型,针对转速环采用传统PI控制的PMSM在多工况下易出现响应速度不足、调节时间长、超调大等缺陷,使用了一种模糊PI控制器来改善系统性能。同时在MATLAB/Simulink搭建了基于模糊PI的PMSM矢量控制仿真,仿真波形表明:在多种工况下采用模糊PI控制器的PMSM矢量控制系统较传统PI控制能减小超调,加快系统响应速度,增强鲁棒性能。
参考文献
[1]王莹.现代交流电机控制的现状与展望[J].时代农机,2017(8):116.
[2]陈亚莉.电动汽车驱动电机发展现状分析[J].汽车与驾驶维修(维修版),2019(9):64-65.
[3]鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011(3):75-81.
[4]符慧,左月飞,刘闯,等.永磁同步电机转速环的一种变结构PI控制器[J].电工技术学报,2015(12):237-242.
[5]李垣江,董鑫,魏海峰,等.表贴式永磁同步电机转速环复合PI无位置传感器控制[J].电工技术学报,2020(10):2119-2129.
[6]杜濤,曾国辉,黄勃,等.基于蜻蜓算法分数阶PI的PMSM矢量控制优化[J].电子测量与仪器学报,2020(10):132-141.
[7]朱正伟,刘建委.基于模糊控制的永磁同步电机调速系统仿真研究[J].常州大学学报(自然科学版),2012(3):61-65.
[8]王永富,柴天佑.自适应模糊控制理论的研究综述[J].控制工程,2006(3):193-198.
(编辑 沈 强)
Research on fuzzy PI permanent magnet synchronous motor vector control
Zhang Wei, Xu Jian*, Guo Jinyue, Huang Ying
(College of Intelligent Systems Science and Engineering, Hubei Minzu University, Enshi 445000, China)
Abstract: The ordinary PI control in permanent magnet synchronous motor (PMSM) vector control is liable to overshoot, low response speed, and insufficient robustness on operating conditions. Adding fuzzy control to the ordinary speed PI controller of PMSM dual closed-loop vector control system is proposed. This enables the system to adjust PI parameters in real-time based on the different PMSM speed errors and speed error change rates, thereby maintaining zero overshoot and good control accuracy and robustness under different operating conditions. This article builds a PMSM control system simulation model with a fuzzy PI control in Simulink, and compares and analyzes it with PMSM vector control system equipping ordinary PI control under multiple working conditions. The simulation consequence indicates that the PMSM vector control system with fuzzy PI control has a smaller overshoot, faster response speed, and enhanced robustness compared to ordinary PI control.
Key words: permanent magnet synchronous motor; fuzzy control; Simulink; PI control
猜你喜欢
汽车工程学报(2016年5期)2017-01-16 02:42:50
计算技术与自动化(2016年4期)2017-01-11 14:06:23
电子技术与软件工程(2016年19期)2016-12-19 18:43:28
中国科技博览(2016年15期)2016-08-23 00:59:37
电脑知识与技术(2016年13期)2016-06-29 21:41:37
西南交通大学学报(2016年3期)2016-06-15 20:29:35
科技视界(2016年12期)2016-05-25 11:07:56
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
西北工业大学学报(2015年1期)2016-01-19 03:29:52
