异步电动机转子断条失效诊断研究与发展概况
2023-11-30 03:05王泽宇陈建国王景明盛志伟宋雨
防爆电机 2023年6期
王泽宇,陈建国,王景明,盛志伟,宋雨
(哈尔滨电气动力装备有限公司,黑龙江哈尔滨 150040)
0 引言
异步电动机的使用比任何其他形式的电机都要广泛,尤其是具有更高功率和电压的大型异步电动机被广泛应用于工业环境中,如水利、矿山、石化及核电,以为其主机提供动力。然而,有许多故障会阻碍异步电动机的顺利运行,并且任何故障都是从正常运行的一个小偏差开始的。如果在早期阶段没有检测到故障并进行处理,可能会导致灾难性事故。因此,电动机“状态监测”越来越受到用户和制造商的重视。状态监测是检测和诊断与故障相关的基本电机量变化的过程,从而可以安排适当的维护,防止故障扩大,这优化了运维性能并强化了运维质量控制。
转子断条,是异步电动机产品常见的故障,无论是设计制造或者是长期运行环节的不足或者不当,均有可能逐步引发转子的导条开裂或断裂现象,从而直接对电动机运行安全产生不利影响。因此,更好地实现断条故障在不同驱动系统、不同负载水平、不同速度下等条件下的准确在线检测和诊断,成为制造商和用户的迫切需求和完美目标。
需要注意的是,不同类型的电机电源在故障诊断过程中有着不同的作用。直接在线模式下,向电动机施加纯正弦电源电压,而在逆变器供电模式下,电源电压包含各种谐波。在第一种情况下,电机变量直接取决于负载水平,但在逆变器供电模式下,电气和机械变量是可控的。由此,故障诊断过程中的有效因素数量显著增加,故障检测因而更加复杂。主要影响因素因子包括高频开关电源电压,它导致了气隙磁通密度的更多失真。
本文介绍和总结分析了当前较为主流及较准确较易实施的转子断条状态监测原理及方法和例证。当然,所有诊断方法和指标都无法涵盖工业环境中遇到的所有实际情况。例如,使用傅立叶变换(FFT),作为断条故障的直接结果的幅度不能在轻负载水平下返回真实的故障特征。这说明,尽管故障一发生,电机量中确实存在与故障相对应的量,但它们在某些特定条件下可能无法检测到。因此,有人提出分析电动机电流以外的信号,例如对故障反馈比电动机电流更敏感的磁通密度。然而,测量磁通密度需要一个场的检测过程,从而导致更复杂的诊断方案。那么,影响故障检测过程的因素很多,而选择适当的方法,以便在负载和速度水平等各种影响量的变化时准确检测、确定和诊断故障程度,十分必要。
1 电机电流特征分析(MCSA)
此处首先讨论直接在线运行异步电动机,则有电源电压和电流有公式如下
V=Vmsin(ωst)
(1)
Is=Imsin(ωst+α)
(2)
然而,电源电压是固定的,不会随着故障而变化。因此,电机电流信号被重新表述如下
Is=Asin(ωst)+Bcos(ωst)
(3)
根据式(3),断条故障反映为时域中电机电流包络的周期性振荡。振荡的频率等于2ksfs,这意味着在电机电流中检测到不仅具有最大振幅的一阶边带分量,同时对更高阶分量也有影响。通常情况下,边带分量的幅值随着一个位置的故障水平的增加而增加。
图1展示了一个正常的电机,图2展示了有一根断条的电机。在图2中可以清楚地观察到电流包络的周期性振荡。由于2ksfs是电机滑差的函数,如果电机负载增加,则振荡频率会更高。也可以看到,在固定电源频率下增大负载会导致故障特征的明显增大。
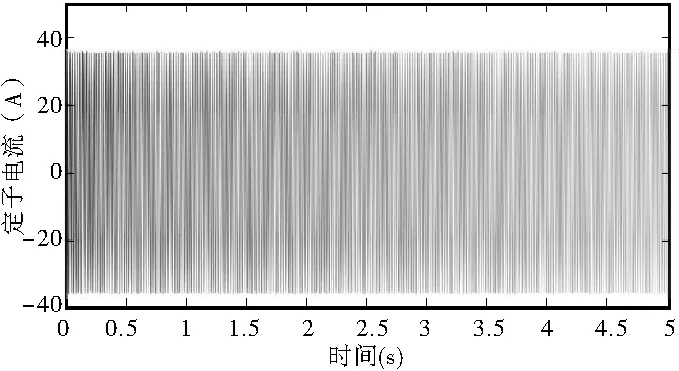
图1 正常异步电动机定子电流图

图2 异步电动机断条后定子电流图
在时域或频域中研究电机电流(MCSA),被称为故障诊断程序中最好的技术之一,但并不一定是最准确的技术。该技术被广泛使用的原因之一是相应测量的容易性。此外,如果使用可靠的屏蔽电缆,监控单元可以远离电机位置,在测量电机电流信号的同时,可以使用调谐良好的无线传输设备传输故障量相关数据,从而可能实现无线监控。
MCSA同样适用于逆变器供电的应用,无论逆变器的类型和控制策略如何,参见图3、图4(电压源)。图中显示了逆变器供电电机在两种不同速度下以及不同故障水平下电流包络的时域变化。
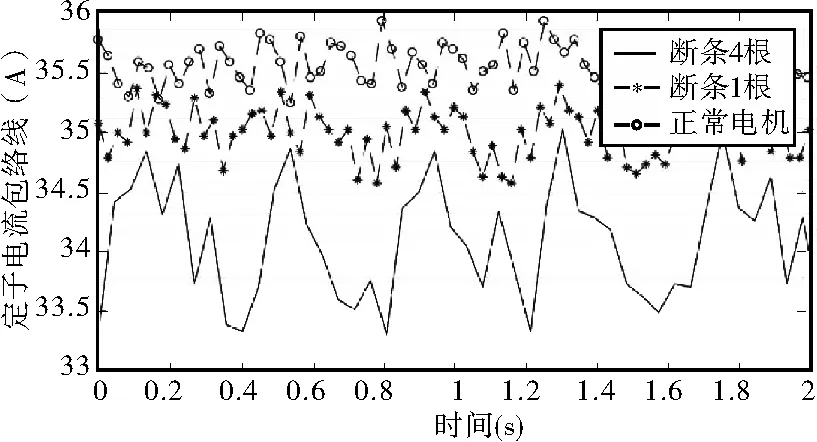
图3 逆变器供电的电机定子电流包络图(1500rpm)
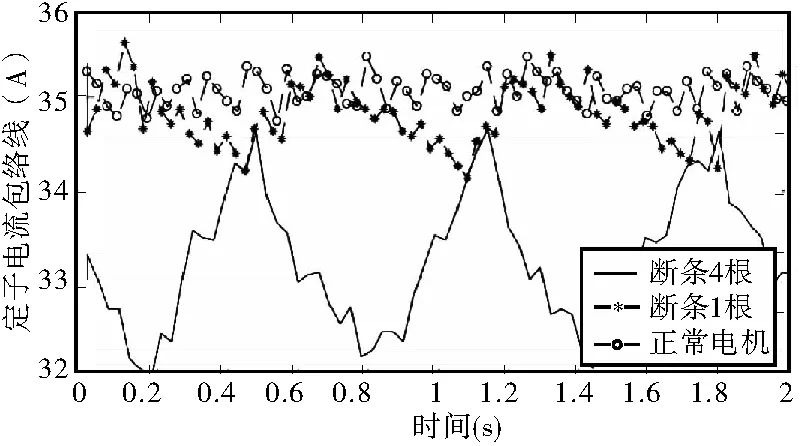
图4 逆变器供电的电机定子电流包络图(700rpm)
2 振荡
由于感应电动机模型通常忽略不计了其固有不对称性,因此使用电流的分布在某种程度上不能诊断由固有边带分量引起的随时间变化的振荡。这时,它可以通过一种称为“持续振荡”的新故障指数来体现,该指数定义为电压和电流空间矢量之间的相移,由式(7)得到作为断条数量函数的相应变化示例的图5。
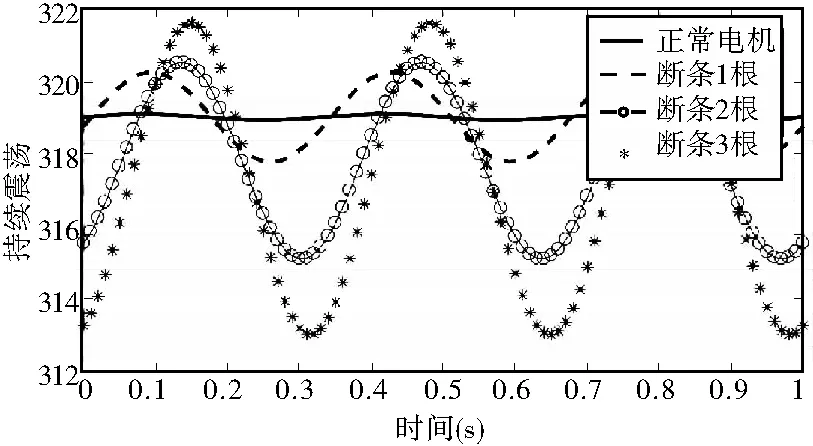
图5 PWM电机的持续振荡检测应用

α2(ic-ia)]
(4)
(5)
(6)
(7)
持续振荡要使用低通滤波器进行测量,从而消除高频开关现象引起的可能会影响正确测量过程的波动,且电压和电流信号都需要通过低通滤波器采样到处理器中。摆动振荡既适用于直接在线运行电机,也适用于逆变器供电电动机。
这里,振荡的振幅随着故障和负载水平的增加而增加。值得注意的是,正常电动机的摆动振幅不为零,这也证明了边带分量存在的概念。
需要注意,对于此种精确诊断和状态监测工具,除了断条故障之外产生的不同因素,例如气隙中产生反向磁场,可能会引入相同的特征,而导致错误的判断。因而这种因素需要事先得到排除。这里我们介绍的是一个时域指标,使得能够在不同的故障和负载水平下诊断断条故障,并且该技术的准确实施可以用于各种供电模式,包括在线运行以及开环和闭环策略。因此,它可以被认为是在时域中应用的最有用的诊断技术之一。当然,该指标检测故障位置的能力尚未得到进一步研究。
3 速度波动
多数情况下,感应电动机的故障发生在电机运行过程中,因此,存在从正常状态到故障状态的转变,导致某种不希望的瞬态波动,这些波动在几个循环后稳定下来,直到稳态操作。那么,在最初情况下的故障的诊断非常重要,尤其是当电机在启动-停止操作过程中,因为电机速度的突然变化导致的机械瞬态增加了故障发生的概率。由于断条故障给电动机速度引入了非常明显的2sfs谐波分量,以及相应的故障级别与显示效果的对应关系,使得电机速度波动检测成为一种检测早期断条故障很有发展的技术。图6显示了在线启动感应电机在三种不同故障水平下的速度波动,包括1、2个断条以及正常的情况进行结果的比较。早期断条故障清楚地显示了不希望的速度波动,其幅度随着故障等级的增加而变大。在t=0.3s处发生的信号的瞬态部分具有很大的振幅,使得电机承受了额外的机械应力,而这反过来又是导致其他电机部件故障的一个因素。随着时间的变化,信号的瞬态部分逐步消失,这与正常的电机起动明显不同。
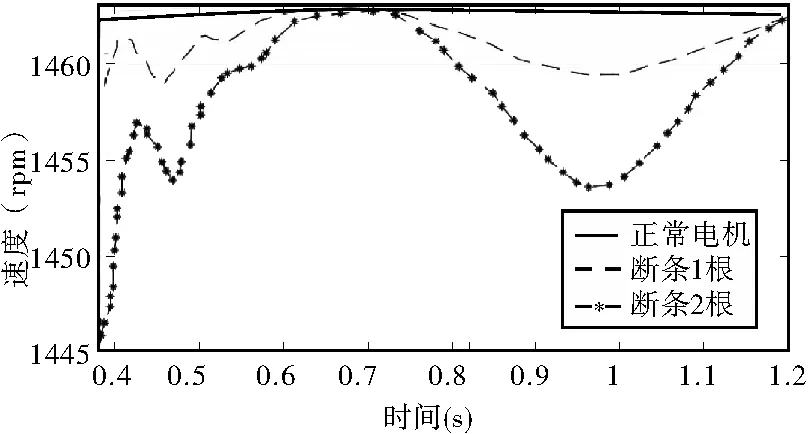
图6 直接在线电动机转子断条引起的起始速度波动
图7显示直接转矩控制(DTC)和电压频率比(CV/F)控制模式的速度波动,图中为两根断条故障和正常运行。该图清晰地表明,各种控制模式可以极大地影响诊断过程。DTC控制策略的电动机的波动幅度大约等于零,这是由于DTC驱动器中存在速度闭环,因此相应的机械速度总是由PI控制器的带宽调节;如果带宽很小,振荡的幅度可能会减小到零;而CV/F控制策略相关的波动幅度相对较大。
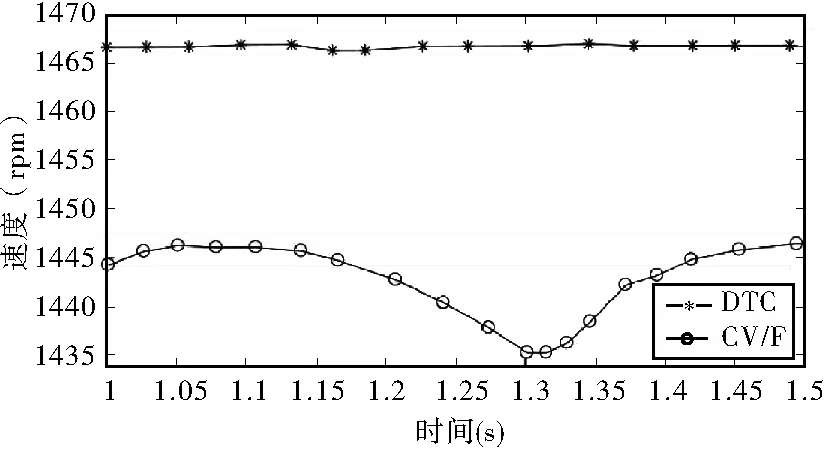
图7 逆变器供电电动机转子断条引起的速度波动
4 小波变换在断条故障诊断中的应用
小波变换(WT)通常被应用于电动机瞬态信号,以便在瞬态操作过程提取故障信息。其中一个重要的应用方式是将WT应用于电机电流,该电机电流的基频通过从电机瞬态电流中减去正弦信号而被滤除。由此,这里考量的是从滤波电流中提取的小波系数。
考虑到由正弦曲线和未知频率组成的附加信号的组成,如式(8)表示
u(t)=Asin(ωt+δ)+n(t)
(8)
式中,n(t)—附加信号的总和;A、ω—正弦波潜在的时变振幅和频率;δ—正弦曲线的恒定相位。
正弦波的总相位为φ=ωt+δ。如果时间变化足够慢,参数A、ω和φ被认为在很短时间间隔内是恒定值,它们就是时间的函数。
这里使用梯度下降方法来最小化输入信号u(t)和嵌入其中的正弦信号Asin(ωt+δ)之间的最小二乘误差。结果是以下一组非线性微分方程来呈现信号动态算法,该算法旨在提取嵌入u(t)中潜在的正弦信号,而不需要对附加信号的组成进行任何假设。

(9)
(10)
(11)
顶部的点(·)表示相对于时间的差异。误差信号e(t)表示输入信号和提取的正弦曲线之间的差,即
e(t)=u(t)-Asinφ
(12)
图8显示了该算法在检测扰动方面的能力。一旦算法提取出基本分量(虚线),就会检测到叠加分量(点线)。该算法在跟踪输入信号特性(如基本分量的振幅、相位和频率)的时间变化方面具有完全自适应性。最重要的是,该算法在追踪频率随时间变化方面表现出非常好的性能。

图8 施加在正弦信号上的扰动的检测图示
在实现基本提取算法之前,将线电流转换为单个旋转电流矢量,然后将该矢量转换到时域中,并用作提取算法的输入。该算法提取非平稳基波的瞬时频率、幅值和相位,同时,该算法需要几个周期才能收敛,因此,当从原始波形中减去估计的基波时,应该丢弃0到0.2s之间的算法输出,以允许算法收敛。然后使用离散小波变换和Daubechies 8小波对剩余电流进行分解。通常,在分解等级7~10,会看到断条电动机与正常电动机样本后段相比的小波系数存在明显差异。
5 Hilbert-Huang变换(HHT)在断条故障诊断中的应用
HHT方法应用是基于电机电流,而MCSA无疑是最可靠的诊断方法,因此这是一种很有前途的断条故障诊断工具。它的基本概念公式为
(13)
(14)
式中,m—表示输入信号被分解成的能级的数量;a—特定时间t的信号幅度和瞬时频率ω。对于不同的频率分量,从输入信号的HT获得a和ω。可见HHT是基于对一种时间变化现象的计算以及对其在不同频带上的变化的表示。
图9和图10显示了正常电机以及典型断条故障电流的IMF。IMF1包括信号的最高频带,其他频带的频率限制按IMF的顺序减小。这意味着IMF3的分量存在于较低的频率。残差是输入信号和IMF之和之间的差。如图10所示,当故障发生时,可在IMF2中观察到单频波动。
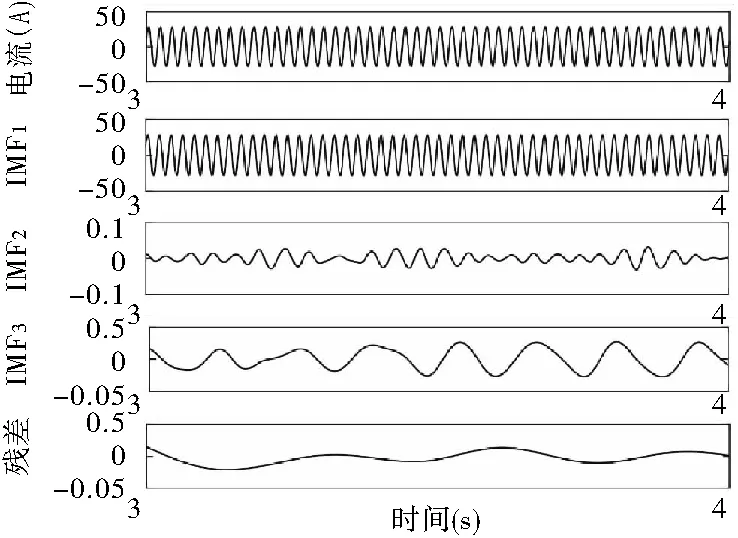
图9 正常负载下电机电流IMFs

图10 1根断条情况电机电流IMFs
6 结语
本文总结分析了异步电动机断条故障时主流稳态和瞬态的信号处理和检测方法,可以看到,实现精确的异步电动机断条故障诊断,首先需要首先选择合适的信号并经过处理,信号处理技术以及最终提取故障敏感特征是诊断过程的关键,亦即选择适当的域(时间、频率、时间-频率)、合适的信号、应用适当的信号处理技术等。值得注意的点是,大多数提出的技术都是和正常条件相关的,这意味着有必要在正常条件下建立指标库,以便在故障情况时进行比较,从而更加清晰地对转子断条故障进行准确判断。
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
基层中医药(2021年12期)2021-06-05
防爆电机(2020年3期)2020-11-06
英美文学研究论丛(2018年1期)2018-08-16
纺织科学研究(2017年6期)2017-07-03
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10