
以无人机航测及水下地形测绘技术为主的水利工程DEM 构建研究
2023-11-30 11:33王振宇
科技与创新 2023年22期
王振宇
(河北省水利水电勘测设计研究院集团有限公司,天津 300000)
DEM 为三维空间内平面坐标和高程所组成的数据集。在此数据集中的网点,直接反映测量区域内的地貌信息和地形空间分布特征,基于此数据分析测点环境,能够对水利工程测绘和水文工作起到支持作用。现阶段,在水利工程中主要应用的DEM 类型为SRTM和ASTER GDEM,但以上数据的分辨率最大为90 m,不符合高精度标准。并且在构建DEM 时要支付一定费用,申请过程复杂,降低了时效性。为解决以上问题,水利行业引入GIS+BIM 技术,将2 项技术协同作用,应用于水下地形测绘中,通过叠加河道和地表DEM,得到高精度数据,为水利工作奠定基础。
1 无人机航测技术应用
1.1 无人机航测
现阶段,无人机航测是得到DEM 数据的关键方法,能够在实际应用中将多类信息显示于同一地面高程模型上,基本涵盖树木、桥梁和地表建筑物[1]。严格意义上讲,借助无人机航测方法表达了地表高程,但所生成的模型不完全符合DEM 数据特征,属于数字表面模型。本文所给出的实践应用是以外业航拍图片作为密集点云数据构建基质,借助滤波处理密集点云,将树木、建筑物等高度予以剔除,整理输出点云数据,将其以地面DEM 形式应用于水利工程中。使用拓普康天狼星无人机,利用所具备的实时动态差分技术,将GPS 基站架设于地面,将装载GPS 接收机放置于无人机上,得到获取点位信息数据。利用解算功能,输出横纵坐标和高程坐标,达到免相控效果。无人机装载的传感器焦距为35 mm,型号为Sony-RX1R2,所采集的数据地面分辨率处于[1.6,20]cm 区间,有效像素4 200 万,一定程度上提高了航测精度[2]。在实际应用中,以某河为例,由技术人员划定测绘范围后,参考MAVinci Desktop 设计飞行计划,并设定分辨率,一般为12 cm。在MAVinci Desktop 中设计坐标系,匹配位置数据和照片,更正基准站坐标的匹配结果,由Agisoft PhotoScan 软件接收导入数据,智能化、自动化地处理无地面控制点。联合使用RTK 技术,收集实测位点,便于检验后续数据成果精准度。
1.2 点云生成与滤波
经过无人机航测得到基础数据信息后,在同一坐标系中集合目标表面特征和目标空间分布数据点,基于颜色信息和三维坐标,利用点云数据开展自动计算作业。无人机搭载传感器形成测定系统,系统具备空三计算能力,自动计算输出点云数据[3]。采取加密操作,点云呈现密集特征,最终经过基础分类,生成地面点数据。密集点云进一步划分为非地面点,并展示低矮植被、高植被和建筑物类型,自动区分非地面点和地面点类型,后者属于点云滤波。由于文章的研究重点为所派生的地面DEM 数据,因此重点采用点云滤波方法[4]。此种方法需预先设定非地面点和地面点区分标准,以此作为假定条件,包括地面坡度变化在一定范围内、非地面点高于地面点,然后应用于滤波算法中。非地面点和地面点的区分利用三角网渐进内插,此种方法是Agisoft PhotoScan 软件作用于点云滤波环节的主要形式,经过参数调整后,单元大小、最大距离和最大角度处于合理区间,输出点云滤波结果。在技术支持下,解决了传统测绘中的漏分和错分问题,机器自动分类,人工判别点云滤波结果,筛选错误点云,将其划分至合理类型,形成非地面点和地面点划分结果。
1.3 生成地面DEM
非地面点不属于地面DEM 数据范畴,经过点云滤波,所得到的点均为地面点,由此设计构建地面DEM。以某河道为例,在此河道中间存在非地面点数据,此部分区域在图像上显示为空白特征,经软件系统裁剪后,生成不含非地面点的DEM 数据。与传统ASTER GDEM 软件所测得数据相比,无人机航测所获取的数据信息具备较高分辨率,并且能够真实反映测量区域的地貌地形特点[5]。
2 水下地形测绘技术应用
无人机航测得到正射影像,显示河道范围,但无法显示水底高程信息,不利于水利工程作业开展,难以满足水利工程设计、洪涝淹没分析、河流整治的自动化处理需要,因此要联合使用水下地形测绘技术。此项技术能够实现港湾水底点、江河湖泊水底点平面位置及高程测绘目标,输出水底高程数据信息,弥补无人机航测数据信息缺失,将水下数据补充完整。在无人机航测完毕后,结合所得数据,制作DOM,将河道范围进行矢量化处理,在此范围内,使用测深仪测量水底高程,自动形成等深线,基于等深线差值构建河道DEM 数据。
2.1 水底高程测量
单波束测深仪和多波束测深仪是水底高程测量中常用的仪器类型。前者具备价格低廉、操作简单以及外接设备少的优势,该类仪器借助线性模式测量原理,对于范围较小的河道和水域能够发挥实效,但不适用于需要完全获取水底地形变化信息的作业中;后者具备精度高、高作业效率和全覆盖测量地形地貌的优势,虽需外接多个设备,但能实现大范围测量作业目标,真实准确反映河道、湖泊和海洋水底高程数据信息。在实际测量中,可根据水域范围、成本和精度要求选定测深仪种类。例如:某河道宽120 m,属于小范围水体,使用单波束测深仪即可完成测量任务。在测量阶段,确定采样点间隔,此河道设定的水底高程测样点间距为1.5 m,即可准确测出不同区域的水底高程数据[6]。
2.2 等深线绘制
充分考量高程粗差和高程点密度不足的现实情况,在获取基础水底高程数据后,随机抽样,进行数据精度检验[7]。结合检验结果,技术人员将剩余点以等深线形式排列,并将等深距设定为1.5 m 绘制地形图,保证所绘制的图像具备点位均匀密集特征。除采取以上方式外,还可运用插值办法,依据高程点绘制等深线图像[8]。
2.3 生成河道DEM
河道DEM 数据中要真实反映河道地貌地形特征,为此,在精度要求下,由无人机航测产出正射影像产品,运用矢量化法处理边线,圈定河道范围。测定水边高程数据,采取野外实地测量办法,将高程值赋于水边线,得出河道范围数据,充实高程信息。经过水底高程测量后,输出等深线图像和信息,构建不规则三角网TNT,创建研究区的河道DEM 数据。例如,在某河道研究区,所节选的最高为14.8 m,最低为-10 m。经调研,河床和河道沿岸起伏小,整体符合平坦地形特征,并且河床与河岸的过渡区存在变坡,河道右侧至中部抬升明显,左侧至中部出现深坑地质,最终形成的河道DEM 如图1 所示。

图1 某河道DEM
3 以无人机航测及水下地形测绘技术为主的水利工程DEM 构建
3.1 DEM 整体构建
应用水下地形测量技术和无人机航测方法所得到的DEM 数据彼此独立,构建整体DEM 数据需采取叠加运算办法,生成研究区域DEM 整体数据[9]。水下地形测量技术和无人机航测所得数据所使用的计算模型不同,由此得到的高程会出现不吻合情况,尤其是范围接边处,不吻合情况较严重,因此需要进行深加工。使用QT Modeler 三维软件,导入叠加运算数据,同时对正射影像进行叠加,生成三维模型,代表研究区河道地貌地形信息。精修研究区DEM 数据,采取平滑处理办法,作用于接边处不吻合位置,形成精修后的水利工程DEM 数据,如图2 所示。
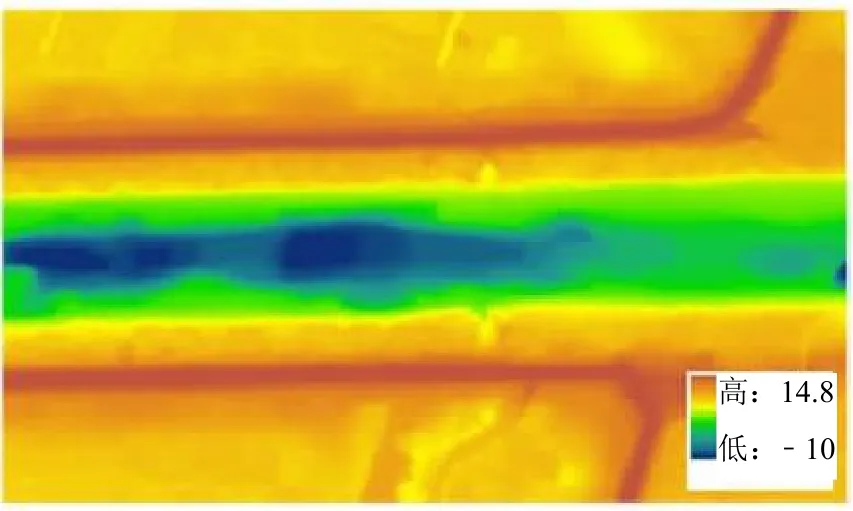
图2 某水利工程DEM
3.2 质量检验
完成水利工程DEM 数据构建后,需对其质量予以检验。具体检验方式为:使用RTK 技术确定水下高程点66 个、林下点37 个、地面点48 个,开展DEM 质量检验。其中,1 mm 内不同范围高程测点校差情况如表1 所示,DEM 质量检验结果如表2 所示。
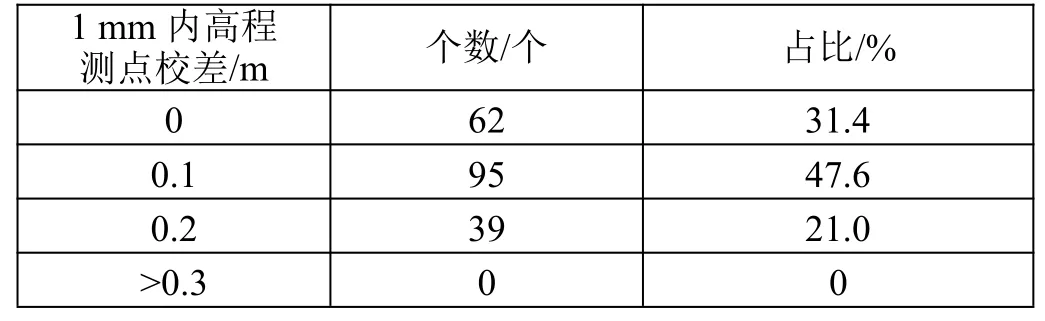
表1 高程误差对比
通过表2 可以发现,水下高程点个数为66 个,最大高差1.13 m,最小高差0.02 m,平均高差0.40 m,高差标准差0.31 m;林下点个数为37个,最大高差1.18 m,最小高差0.04 m,平均高差0.56 m,高差标准差0.35 m;地面点个数为48 个,最大高差0.35 m,最小高差0.01 m,平均高差0.16 m,高差标准差0.11 m。整体来看,精度高低顺序为地面点>水下高程点>林下点。出现DEM 数据精度差异的原因是:所测区域含有大片密林区,此类区域在采集数据时容易出现点位缺失的情况,使得经过拟合的林下点不具备真实反映此区域地形地貌特征能力,精度最低。而水下高程点介于林下点和地面点精度之间,基于对测量要求的考量,误差为地面点误差2 倍左右范畴,因此所得到的河道DEM 精度可靠。在河床与河岸变坡区域是高差数值较大位置,此区域对整体水利工程DEM 影响可忽略不计。
利用所构建的水利工程DEM 数据能够计算出水库库容,计算公式为:
式中:S为水面面积的数值;V为设计水位库容量的数值;h0为某一设计水位的数值;hi为设计高程以下淹没的某单元高程的数值;a为DEM 方格网边长的数值。
利用DEM 方法,将水库水体划分成多个立方体结构,每个立方体体积计算参照公式(1)。计算完毕后绘制某水利工程水库库容曲线,提供生态流量分析和防洪依据。
4 结论
综上所述,本文所给出的水利工程DEM 数据构建办法基于无人机航测技术和水下地形测绘技术,在分别得到地面DEM 和河道DEM 后,运用矢量化法,处理边线,圈定河道范围,输出等深线图像和信息,构建不规则三角网TNT,创建研究区的河道DEM 数据。经过质量检验,确定水下高程点和地面点的精度较高,林下点高程精度较低,证明所得到的DEM 产品具备可靠性。同时,基于此产品使用公式(1)能够得到与实际情况相符的水库库容,说明在实践应用中能够提供数据支持,实现自动化处理洪涝淹没以及河流整治问题。相较于传统测绘方法,联用无人机航测技术和水下地形测绘技术的精度更高,并且能够保证在树木稀疏和房屋稀疏区域测得精准数据,值得在实践中予以推广。
猜你喜欢
煤气与热力(2021年10期)2021-12-02
当代陕西(2020年23期)2021-01-07
装饰装修天地(2020年11期)2020-07-04
小朋友·快乐手工(2018年9期)2018-12-20
铁道勘察(2018年5期)2018-10-22
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
房地产导刊(2015年6期)2015-10-21
语文知识(2015年11期)2015-02-28
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
