
水上精灵:全自动水域垃圾清理设备*
2023-11-30 11:31周亚东吴旭东黄文良何明俊程稳
科技与创新 2023年22期
周亚东,吴旭东,黄文良,何明俊,程稳
(湖北汽车工业学院,湖北十堰 442002)
面向国家可持续发展战略,设计了该全自动的水域清理装置,控制水面漂浮垃圾污染物。针对水面垃圾清理问题,目前基本上是通过人工乘船进行打捞,但这种方法存在一定局限性,在小型河流、人工湖泊、水上游乐场等地,往往有水面狭窄或水很深的地方,船体不能通行,打捞难度大;另外,对一些景观湖、河,人工打捞还会对周边环境造成影响。而且现有水面垃圾清理装置多是自动化装置,如大型综合清污船之类的水面固体垃圾收集机械,它具有良好的续航能力和强大的功能,却因体积庞大在狭小的水域移动不便、工作效率不高,动力消耗及使用成本太高,不能适应小型河流、人工湖泊、水上游乐场及其他地方水面垃圾清运需求[1]。针对上述问题,设计了一款机动灵活、作业效率高、造价较低的水面垃圾小型清理机器人[2]。
首先吸取了已有水面垃圾清理装置的长处,同时对现有装置中存在的一些问题进行了分析。为解决水上垃圾污染问题,对全自动水域清理机机械结构进行了设计。装置的主要结构包括船体、垃圾收集装置、垃圾分类装置、垃圾压缩装置及其电气元件。
该装置采用强度好、质地轻盈的材料,通过结构分析及静力计算,设计出介于单体船与双体船之间独特的船体类型,又从动力、收集、分类和压缩等方面入手,依次设计出实现各部件功能要求的机械装置。经过对结构设计的稳定性进行分析,将它进行装配,使它拥有结构稳定、收集空间大、转移灵活等优点。
1 水域垃圾清理装置介绍
设计的水域垃圾清理装置应具有以下功能:①水面垃圾清理装置要能够平稳运行、可靠性优良、灵活地在水面进行工作;②在工作过程中能够区分垃圾和障碍物,避免将两者混淆,能够自主向垃圾移动并对其种类进行识别,从而将垃圾按种类进行收集;③能在垃圾收集源头实现对垃圾的分类操作;④对分类的垃圾进行压缩,通过压缩装置的作用,最大程度上提高空间利用率。
水域垃圾清理装置运行框图如图1 所示。

图1 水域垃圾清理装置运行框图
2 电子控制系统
要实现对整体机器的控制,需要对主要机构的动力源进行准确控制。本文设计的水上垃圾清理装置的主要功能机构为水陆两用轮和清理机构,即需要实现对水陆两用轮的驱动电机、与控制分类挡板相连接的凸轮角度的转动的舵机、清理机构中控制传送带运行的减速电机和后方压缩装置的步进电机的控制。因此,根据控制系统的整体方案设计、机构基本控制策略和机构的控制系统设计要求,同时为了使各功能部件的运行相互协调、流畅,从而使该装置达到良好的工作状态[3]。控制系统设计主要从以下2 个方面切入:首先,根据各机构的运动形式和工作负荷来选取合适的控制电机及其型号;然后,再将这些电机分别与水域清理装置各功能部件连接在一起,形成一个可控制的整体,从而达到水域清理装置控制系统设计的目的。水域垃圾清理装置硬件设计如图2 所示。

图2 水域垃圾清理装置硬件设计
3 软件结构
采用了基于视觉识别的水上垃圾清理装置,选取常见不同种类的海洋垃圾,制作数据集,以对水面上垃圾的调查和本装置的机械结构为依据,选择了可回收垃圾、不可回收垃圾、其他垃圾3 类作为数据集,每一类选择多个目标进行采集,每个目标拍摄50~100 张照片,选择不同角度、不同位置拍摄,然后进行人工神经网络的训练,最后将训练好的神经网络应用于所使用的OpenMV 摄像头。OpenMV 检测到垃圾,自动判断该垃圾属于设定的3 类垃圾中的概率,将概率最高的种类通过串口输出到STM32 单片机中,单片机控制舵机使与之相连的旋转架带动凸轮转动不同角度,与凸轮同步运动的分类板也将随之运动,以此实现不同种类的垃圾分选后进入各自的垃圾箱中;使用传感器测量垃圾到垃圾箱口的距离,设置距离阈值,当达到阈值后主控发出压缩垃圾的信号对垃圾进行压缩,当与压缩板相连接的压力传感器达到阈值后使电机反转收回压缩杆,本次垃圾识别收集分类压缩完成。还可以将垃圾与车的位置信息传输给单片机,假设垃圾在图像的左上角,说明垃圾在车的左前方,车往左前方运动,从而实现自动寻找并收集垃圾[4]。
4 机械结构
在结构设计上,本产品主要由船体结构装置、水陆两用轮结构装置、垃圾收集结构装置、垃圾分类结构装置、垃圾压缩结构装置5 个部分组成,如图3 所示。

图3 水域垃圾清理装置机械结构图
船体结构装置设计:由于该装置是针对沙滩、河流、海洋、人工湖泊、景区湖泊等水域垃圾的清理和回收,为了实现在尽可能小的空间中容纳更多垃圾和执行机械,同时便于拆装和维修各部件机器和能源部件等功能模块,保证该装置在水面进行工作时可以平稳运行、高效工作,因此对双体船进行改进,将单体船与双体船进行结合,将单体船前身部分进行割除,为收集装置传送带的安装留出充足空间,而船体船身中间与后面部分可用来安装垃圾分类装置与垃圾压缩装置。
水陆两用轮结构装置设计:将沙地轮胎与叶轮相结合,能够在水上和陆地2 种环境中自动巡航移动以实现跨水域的自动清理,并且可以彻底解决因机器搁浅及改变作业水域而带来的人工处理成本。
垃圾收集结构装置设计:对传送带式收集装置进行了改进,采用镂空式传送带,垃圾在被传送的过程中其上面的水可以自然流落,且传送带上安装有镂空挡板,使饮料瓶与塑料袋都可被收集。
垃圾分类结构装置设计:本文设计了基于机器视觉的垃圾自动分类系统和垃圾分类的硬件系统,该结构可以实现对可回收垃圾、不可回收垃圾及其他垃圾的分类[5]。垃圾分类装置由凸轮、挡板、推杆和舵机等构成。其中,挡板通过轴、法兰、夹片等零件与凸轮连接从而保证挡板和凸轮同步运动,推杆与舵机通过法兰连接使得推杆能够按照给定的角度转动;推杆和凸轮与底板形成转动副,当推杆转动时可以与凸轮接触形成高副进而推动凸轮转动。其工作原理是通过舵机的左右旋转驱动推杆推动凸轮左右旋转从而使通道挡板旋转,实现不同种类垃圾通道的开合。垃圾分类结构装置如图4 所示。

图4 垃圾分类结构装置图
垃圾压缩结构装置设计:针对水上垃圾收集装置本身垃圾存储空间有限的问题,设计了一种丝杆传动的剪叉式垃圾压缩装置,可有效对已收集垃圾进行简单压缩与整平,提高垃圾的存储空间。该垃圾压缩装置主要由电机、丝杆螺母机构、滑块、支撑杆、挡块等组成。通过电机的运动带动丝杆做旋转运动,从而使得螺母进行横向移动带动支撑杆摆动,以实现挡块上下自由移动来进行压缩。该结构装置简单可靠、受力情况较好,无需液压等重型装置,成本较低,压缩垃圾的性能良好。
在制作的模型中压缩装置的质量大约为500 g,丝杠的机械效率为0.9,为保证速度其导程选为8 mm。
垃圾压缩结构装置如图5 所示。图5 中设支撑杆2 个圆心间的距离为L,压缩装置的重力为G,丝杠提供的推力为F,支撑杆与丝杠的夹角为α,根据能量守恒定律可得:
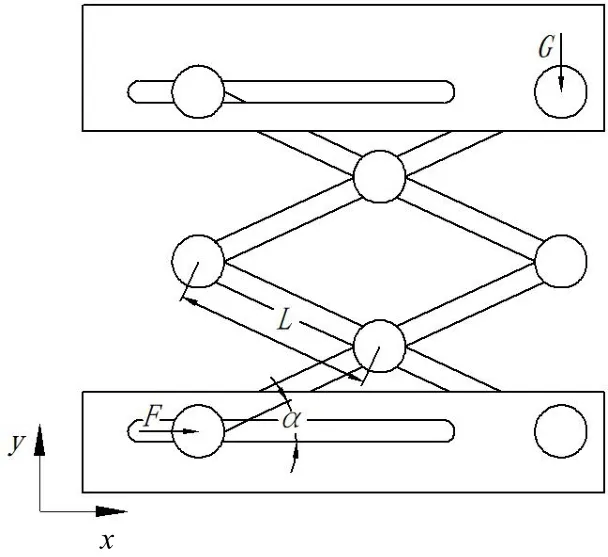
图5 垃圾压缩结构装置图
根据几何关系:
对x、y求导得:
代入式(1)得:
由上可得,当α减少时,F增大;当α为0 时,机构自锁。
一般丝杠螺母机构整体构造为电机+丝杠螺母,电机工作扭矩T的计算公式为:
式中:BP为丝杠导程的数值,单位mm;η为丝杠机械效率的数值,一般取0.9~0.95。
电机扭矩T=2G×8/2×π×0.9。
5 结论
本文设计了一种全自动水域垃圾清理装置,专为具有深度浅、水流缓、形状不规则等特点的小型水域而设计。该装置解决了目前的清理装置存在船体较大、小型水域无法灵活展开作业、噪声大、交通不便、空气污染等的缺点。本装置可以对小型水域的水面垃圾进行清理,且能自动巡航,操作方便、结构牢固、运行可靠、价格便宜,很适合在小水域使用。智能化、自动化是当今技术的发展方向,将新技术用于解决目前存在的污染问题是一个宏大的课题,本文以现存的水污染问题为导向,设计了一种基于视觉识别的水上垃圾清理装置,目前该装置还有待完善之处,后续会从视觉识别算法、装置的空间利用率和零部件的轻量化入手进行进一步的研究,以更好地服务于人类社会的发展。
猜你喜欢
水上消防(2020年5期)2020-12-14
文史春秋(2019年11期)2020-01-15
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年8期)2019-09-03
智能城市(2018年7期)2018-07-10
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
深圳职业技术学院学报(2015年5期)2015-11-30
机械制造与自动化(2014年1期)2014-03-01
