
排球拦网机器人扣球运动轨迹实时跟踪研究
2023-11-28 11:42韩盼星莫双瑗
机械设计与制造 2023年11期
韩盼星,莫双瑗
(1.郑州工业应用技术学院体育学院,河南 新郑 451150;2.广西科技大学体育学院,广西 柳州 545006)
1 引言
排球运动员在训练期间经常会进行具有针对性的拦网训练[1],在以往拦网训练中,由于科学技术不够发达,教练员会亲自上阵与运动员进行对应拦网训练,但随着科学技术的不断发展,出现了一系列训练辅助设备,如拦网机器人等[2]。教练员可以应用专门的排球拦网机器人与运动员共同训练。在这种训练模式下,运动员的身体素质得到有效提升,但是排球拦网机器人在使用中,其经常会因为运动速度的不同出现距离偏差和角度偏差,导致拦网效果差,不能满足于运动员的训练需求。
因此,为了避免上述问题的发生,需要对拦网机器人的避障效果和运动轨迹进行实时跟踪。近年来,大量学者开始进行机器人运动轨迹跟踪的研究,如文献[3]中提出考虑参数不确定性的移动机器人轨迹跟踪方法,该方法基于机器人的多种控制问题构建出一个系统误差模型,根据系统内不确定性参数,利用自适应更新率估算不确定性参数,再将估算结果用作虚拟的控制输入,从而获取到各个机器人的转轮转速,依据仿真实验得到了机器人的实际运动轨迹,实现对机器人的轨迹跟踪控制,但该方法的存在角度偏差大的问题。文献[4]中依据机器人的整体控制结构,构建机器人的动力学模型,并利用动力学建模获取了机器人映射模型,并以此为基础,在不确定性因素下设计机器人关节运动控制的表达式,构建轨迹跟踪控制模型,并通过线性矩阵对成立的模型进行求解,实现最终轨迹跟踪控制方法。该方法构建的动力学建模不够完善,应用存在距离偏差大的问题。文献[5]中为提升机器人的跟踪效果,设置一个摄像头,将其与图像相结合共同构建出一个机器人轨迹跟踪误差模型,由于光照会给机器人带来影响,需要对轨迹跟踪误差模型进行转换,转换成一个线性化模型,通过稳定性理论及控制方法等技术,设计出机器人预测控制器,利用控制器对机器人进行跟踪控制,实现机器人跟踪控制方法。该方法构建出的模型存有误差,存在跟踪效果差的问题。
为了解决上述方法中存在的问题,提出拦网机器人运动路径实时跟踪控制方法研究。
2 排球拦网机器人运动路径规划
2.1 拦网机器人结构分析
为提升排球训练中的效率,先对拦网机器人的基本结构进行分析。该类机器人主要由机器人、底板、支架、导轨等结构组成,本次研究的拦网机器人基本结构,如图1所示。
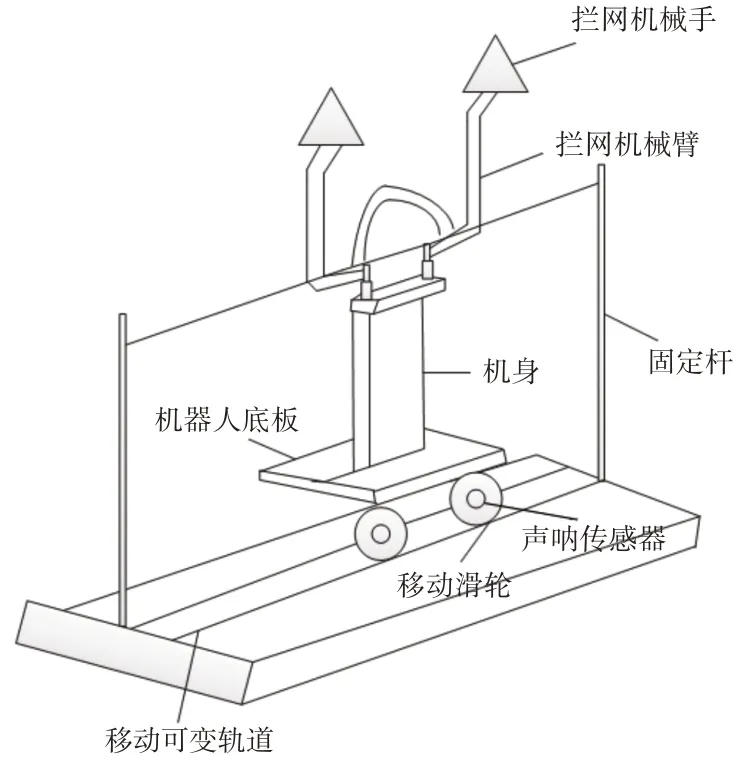
图1 拦网机器人基本结构Fig.1 Basic Structure of Blocking Robot
在拦网机器人应用过程中,其主要运动的就是拦网机械臂和脚下的移动可变轨道和移动滑轮,这两者之中,上部机械臂的运动更为关键,其是提升排球训练效果的关键。因此,在该机器人设计中,本次研究主要对其机械臂自由度以及运行轨迹障碍物感知进行详细设计,以提升拦网机器人整体运用的有效性。
2.2 拦网机器人机械臂动力学分析
拦网机器人在进行拦网扣杀运动中,主要通过判断对方扣杀球角度来确定机械臂的移动方位、移动加速度等参数,其运动实现主要通过手臂的自由度等实现,因此,确定拦网机器人手臂的运行参数确定十分关键。拦网机器人机械手臂的自由度数有多种,本次选取六自由度机械臂进行研究,建立六自由度机械臂建立坐标系,如图2所示。拦网机器人杆件特征图,如图3所示。如图3所示可知,通过两连杆之间的距离和夹角可完成位置关系的确定。由此通过D-H法描述机器人机械臂相邻杆件之间的物理关系,设置D-H参数,如表1所示。

表1 D-H参数表Tab.1 D-H Parameters
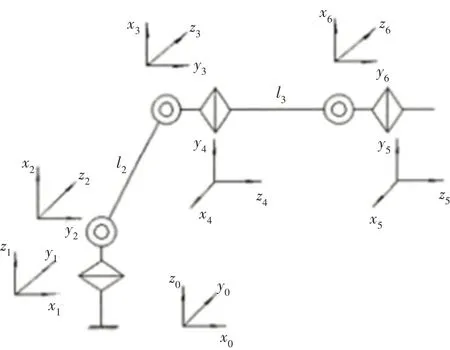
图2 六自由度坐标系建立Fig.2 Establishment of Six Degree of Freedom Coordinate System of Blocking Robot
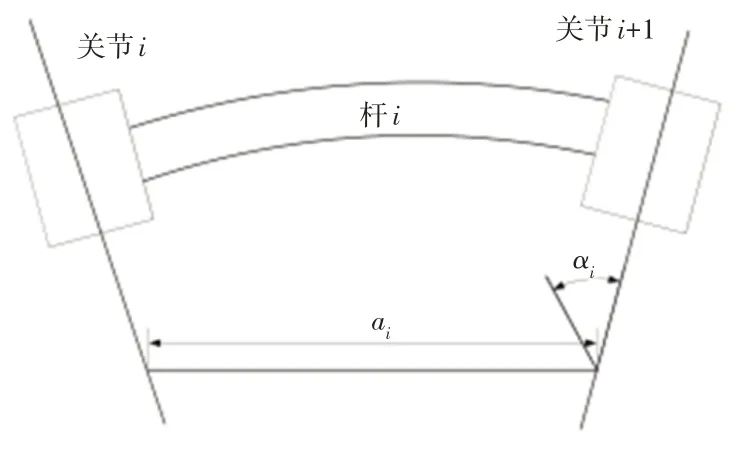
图3 拦网机器人杆件特征图Fig.3 Characteristic Diagram of Bar of Blocking Robot
由于本次所研究的拦网机器人机械臂是一个非闭环结构,当所有参数设定后,其末端的手掌位置和姿态仍然可能出现偏差,当该结构中任何一个关节出现误差后,其偏差会出现传递,导致机械手的误差不断扩大。因此,这里需要对其关节变量进行实时监测。拦网机器人机械手在连杆连接中,其运动通过连杆的旋转个平移完成,每个独立的关节决定了拦网机器人机械手臂的旋转自由度。先计算各关节的位姿矩阵,然后就可得到机器人的末端位姿矩阵。用后置法求取位姿矩阵,如式(1)所示。
通过式(1)可求得各关节得位姿矩阵,接着求出机器人末端位姿变换矩阵,表达式,如式(2)所示。
2.3 拦网机器人运行中障碍物确定及路径规划
在排球拦网机器人在运动期间需要根据球体的运动轨迹进行分析,以做出适当的运动规划,提高其扣球效果。本次研究主要通过在排球拦网机器人中配置的声呐传感器完成球体的检测。声呐传感器可发出声波信号,信号遇到物体后会反射回,之后可根据信号反射回阿里的时间及波形推算其方位和距离,利用声呐传感器检测球体的方位及运动速度,进而帮助机器人完成运动规划。
设置在t与ti时刻声呐传感器传输的声波信号会返回,经运算,t时刻声呐传感器检测到的球体位置为(xt,yt),而ti时刻声呐传感器检测到的球体为)。在这两种时刻下,若检测到球体位置没有发生变化,那么说明该球体处于静止状态,若检测到球体位置发生变化,说明球体处于运动状态。
假设球体预测速度为Vobsi,球体运动方向为ρi,那么此时依据球体的运动行为对其运动轨迹进行判断,这时通过下述判断方程表达式对Vobsi与ρi进行描述,如下所示:
式中:tan—正切值。
通过上述分析判断出球体的运动速度及运动方向后,拦网机器人需要改变其运行的加速度,此时对其速度参数进行约束,以实现扣球。当拦网机器人运行时,结合运动的步幅及运行速度上限,确定其约束为:
式中:hi—球体半径(m);h j—安全距离;px(t)/py(t)—球体当前位置点。
接下来,对拦网机器人的运动路径进行规划,为后续实时跟踪奠定基础。首先构建一个排球拦网机器人运动学模型,其表达式定义如下:
式中:q—排球拦网机器人位置,即q=(x,y)T;v(t)—排球拦网机器人运动速度;ω(t)—排球拦网机器人运动角速度;cos—余弦值;sin—正弦值;θ—排球拦网机器人的运动方向。
若ωleft表示机器人左轮的角速度,ωright表示为机器人右轮的角速度,那么排球拦网机器人的运动状态与转轮转速之间的关系可定义为:
式中:r—排球拦网机器人转轮半径;b—机器人的转轮轮距。
根据上述分析,设置L为排球拦网机器人的路径长度,最终拦网机器人运行规划的路径为:
式中:ti-t—排球拦网机器人的运行周期;(xt,yt)—在t时刻的机器人坐标位置;()—在ti时刻的机器人坐标位置;n—路径条数。
3 拦网机器人运行路径实时跟踪实现
依据上述排球拦网机器人路径规划结果,构建排球拦网机器人运动路径跟踪控制方程,实现排球拦网机器人运动路径实时跟踪[6-8]。
假设排球拦网机器人的期望路径为:pa(xa,ya),设r1min为轮速,当期望路径系数满足ka条件时,此时拦网机器人牵引车[9-10]的控制率为:
式中:u1—牵引车线速度;ω1—牵引车角速度;k2—系数;k3—系数,且k3>0;u1a—期望线速度;ωd—期望角速度;ey、ex、eθ—误差。
根据获取的排球拦网机器人牵引车控制率,完成排球拦网机器人运行路径的实时跟踪,得到:
式中:θa—角速度;x—排球拦网机器人牵引车在水平方向的姿态;y—排球拦网机器人牵引车在竖直方向的姿态;a—描述距离。
4 实验分析
4.1 实验方案
为了验证文本控制方法的有效性,对其进行对比测试。将拦网机器人设置在某一专业排球运动训练中心,通过开展实验,证明所提方法的实用性,具体实验场景,如图4所示。
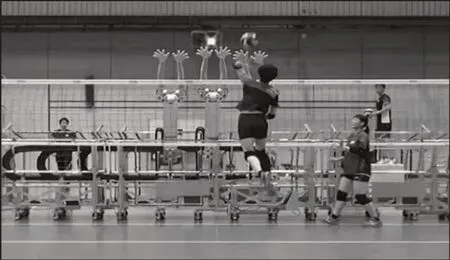
图4 实验场景Fig.4 Experimental Scenario
在本次实验测试中,设置拦网机器人的角度偏差范围为eθ≤5°,拦网机器人的运行速度vT=0.5m/s,该机器人的初始偏差eθ(0)=5°。
4.2 实验结果分析
实验中采用拦网机器人运动路径实时跟踪方法研究(方法1)、半结构环境中机器人机械手鲁棒轨迹跟踪控制方法(方法2)和具有异常数据和执行器饱和的移动舞台机器人跟踪控制方法(方法3)进行实验测试。实验中通过测试不同状态下的机器人运动轨迹的距离、角度偏差等,验证所提方法的有效性。
利用三种方法对不同速度下拦网机器人位姿状态角度偏差及距离偏差进行分析,获得测试结果,如图5所示。

图5 不同状态下距离偏差测试结果Fig.5 Distance Deviation Test Results Under Different States
根据图5(a)、图5(b)中的数据发现,拦网机器人在不同速度运动状态下,随着时间增加,三种方法的距离偏差呈现出上升趋势。图5(a)中,方法2与方法3的距离偏差均大于10mm,而方法1的距离偏差小于6mm,说明方法1的距离偏差要低于其余两种方法。反观图5(b),虽然图5(b)中方法2与方法3的距离偏差比图5(a)中的距离偏差低,但方法2和方法3在高速运动状态下的距离偏差仍要高于方法1。由此可知,在不同速度运动状态下,方法1距离偏差最低。为验证所提方法的有效性,实验分析了不同运动状态下的距离、角度偏差测试,获得测试结果,如图6所示。通过图6中数据发现,当时间不断增加时,不同速度运动状态下三种方法所产生的角度偏差大不相同,低速运动时,方法1的误差小于8mm,高速运动时,方法1的误差小于15mm,均小于对比方法,以此证明方法1的角度偏差最小,表明方法1的路径实时跟踪控制效果最强。
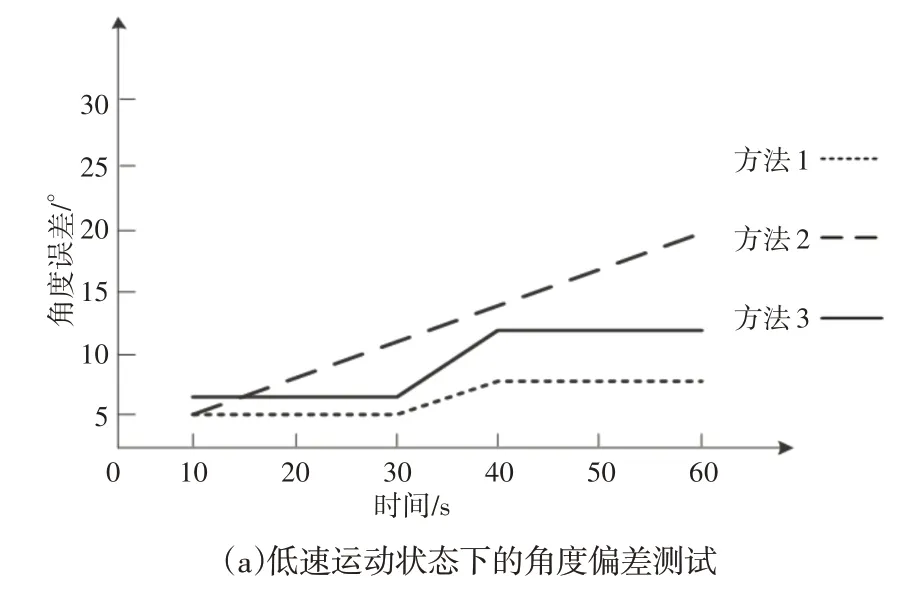

图6 不同运动状态下的距离、角度偏差测试Fig.6 Distance and Angle Deviation Test Under Different Motion States
为了更直观的突出所提方法的实时跟踪效果,实验分析了三种方法对拦网机器人运动路径实时跟踪的精度,获得测试结果,如图7所示。
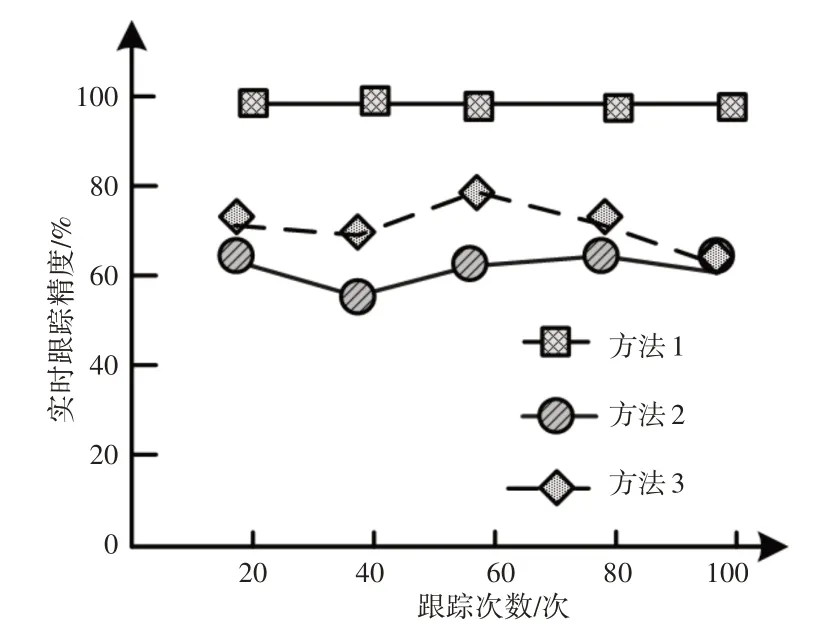
图7 不同方法机器人路径跟踪精度对比Fig.7 Comparison of Robot Path Tracking Accuracy of Different Methods
分析图7中实验结果可以看出,采用三种方法跟踪拦网机器人运动路径的精度存在一定不同。从图中曲线走势可以看出,虽然三种方法的跟踪精度均在合理范围内,但总体来看所提方法的跟踪精度更高,始终高于90%,而对比方法的跟踪精度较小,低于80%,由此可以看出所提方法可以有效跟踪拦网机器人运行轨迹。
5 结束语
拦网机器人随着运行时间的增加导致运行路径偏差。因此,针对拦网机器人运动路径实时跟踪方法存在的问题,提出排球拦网机器人运动路径实时跟踪控制方法研究。分析拦网机器人的基本结构,并确定球体所在位置,通过路径规划结果构建排球拦网机器人运动路径跟踪方程,利用该方程实现对排球拦网机器人运动路径的实时跟踪控制。实验结果表明:采用所提方法对拦网机器人运行路径的实时跟踪效果较好,具有一定可行性。
猜你喜欢
学校教育研究(2022年2期)2022-03-22
数学大王·低年级(2021年4期)2021-04-27
消费电子(2020年5期)2020-12-28
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
武术研究(2020年2期)2020-04-21
池州学院学报(2017年5期)2018-01-23
系统医学(2016年8期)2016-02-20
当代教育理论与实践(2015年9期)2015-12-16
