基于关节位置约束的仓储运输机械臂分拣控制
2023-11-28 05:38:18张洁
自动化与仪表 2023年11期
张 洁
(国网北京物资公司,北京 100054)
近年来,国网物资公司不断探索数字化仓储管理新模式,以高标准建设智慧仓储工程,提高储备物资“共享共用、统筹调配、库存合理”水平,努力实现仓库智能化运营,驱动供应链业务数字化、智慧化转型[1]。随着国网物资公司业务的增长,其仓储运输的工作量也达到了超高水平[2-3]。传统的人工分拣和整理包裹的模式已不能适应日益增长的仓储运输分拣需要,因此,电力设备的自动分拣技术的研究、控制和应用显得尤为重要[4]。要实现高品质的运输服务,必须提高货物仓储运输的吞吐量[5]、分拣速度和精确度。为满足广大用户的精确配送要求,使运输服务更好地赢得顾客青睐,必须对配送分拣体系进行优化[6],并对智能分拣包裹以及机器臂的控制实行研究和优化设计,以减少成本,增加安全、稳定,完成模式识别与智能技术相结合的运输配送自动化控制系统,实现了对物流系统的自动分拣控制[7]。
例如,文献[8]利用差分反馈技术对分拣控制系统的弹性振动进行抑制,给出了一种全局收敛的分段控制方法,使其扩展到全局,解决了Lyapuov 函数逆解控制中存在的系统初始误差在收敛区内的缺点,通过RBN 技术消除由于未知因素和模型不确定造成的误差,从而实现分拣控制的轨迹追踪和输出约束;文献[9]提出一种改进的基于增强学习的DDPG算法适用于六自由度煤矸石分类机器臂。在煤矸石进入机器臂作业空间后,基于各传感器反馈结果可以对煤矸石判断,并将一系列的关节角度状态控制值输出给相应的运动控制器,通过对煤矸石的位置和关节角度来控制机器臂移动,从而达到对煤矸石分拣目的。
但上述方法的机械臂控制效果较差,分拣准确性有待提升。因此,本文提出了基于关节位置约束的仓储运输机械臂分拣控制。通过建立仓储运输机械臂模型,优化控制矢量,采样仓储运输货物特征,识别各包裹信息,利用关节位置约束控制机械臂,实现精准地分拣,保证工作效率。
1 仓储运输机械臂分拣运动建模
首先构建三连杆平面机械臂模型,如图1 所示。

图1 三连杆平面机械臂Fig.1 Three link planar robotic arm
图1 中,在平面中具有一个冗余度。OiXiYi(i=1,2,3)是由Denavit-Hartenberg 建立的各个连接坐标系统,每个连接杆的长度分别是l1、l2、l3,终端位置表示为
式中:C、S 分别表示机械臂余弦函数之和、正弦函数之和,即:
其雅各比矩阵为
雅各比矩阵对时间的导数为
在此基础上,利用雅各比矩阵的伪逆方法计算出机械臂运动公式,基于PD 控制器的负反馈,得出了加速度的反演结果:
2 仓储运输货物特征采样
为了实现对仓储运输货物机械臂分拣控制,建立了一个基于SLP(服务定位协议)和RFID(射频标识技术)的运输包裹出库量的时间序列模型,并利用二者获得包裹特征,从而智能识别包裹与控制机械臂,建立特征采样模型。
式中:D 表示包裹采样特征;s 表示包裹;λ 表示识别参数;Lm表示包裹形状;Km表示包裹体积;n 表示不为0 的正整数。
利用标识技术,对产品的运输和流通进行了分析,得到了延迟特征量表达式为
运用模糊辨识法对仓库系统各功能模块进行模糊增益K=ΔK·Km,ΔK>0 计算,建立仓储包裹分拣的规划模型:
获得包裹分拣的出库数据序列为u(n)。在此基础上,利用模糊追踪法对仓储运输货物进行分拣,得出了该系统的输入和输出之间的关系:
式中:x(n)表示输出数据序列;an、bn表示约束参量。
3 关节位置约束下仓储运输机械臂分拣控制
仓储运输机械臂的物理关节位置约束公式为
式中:qi描述的是关节i 的位置描述的是关节i 的正与负约束。在机器臂分拣过程中,通常要把关节位置层次上的关节位置约束转换为关节速度水平约束,为此本文提出了连续系统在关节速度水平上的位置约束:
从定理可以看出,在一个连续的机械臂运行体系中,式(16)完全约束式(15)。机器臂的关节约束可以按照原理转换成关节速度约束。对于一个离散系统,它的关节极限约束用增量的形式来表达:
式中:Δqi描述的是关节i 在无穷时间Δt 位置增量,联立公式(17),能够得到:
式中:ci=1/Δt。只要离散系统满足ci≤1/T,就能保证机械臂关节的位置约束,并且离散系统的约束和连续约束是一样的。
在关节速度约束的临界点中,由于受时间变化的限制,不能应用WLN 算法(加权最小二乘法)进行求解。必须找到一种将关节速度映射到空间中的非齐次映射,并且在空间中关节速度约束的表达式是不变的,因此使用WLN 法进行求解。本文提出了一种改进的关节概念,即真正的关节空间是由以下转换实现的:
用时间变化的门限关节速度约束代替公式(20),能够获得修改的关节速度约束:
在实际的关节空间中,将具有时间变化的关节速度约束的逆运动学问题,转化为具有固定门限的关节速度约束。利用WLN 法可以解决这个问题。二阶闭环的分拣逆运动学公式为
式中:W1描述的是对角权值矩阵;T 表示周期表示期望加速度。假设加权矩阵表达式为
式中:ε1描述的是关节避障区域宽度,ε1>0,在修正关节速度逼近临界点时,可以降低对应关节的重量,从而可以有效地抑制修正关节的速度。在修正关节转速偏离修正关节速度极限时,通过调节重量消除对应关节的动作极限,以保证关节位置约束是正确的。将公式(20)微分代入公式(23),能够获得实际的真实关节空间闭环控制规律:
将式(25)转换,可得系统误差公式:
此时系统误差分拣指数为收敛状态。
在无冗余的机器臂中,因为关节约束,W1会发生缺秩,所以雅克比矩阵是非奇异性时,仍然会引起算法的奇异,从而使得JW1JT不满足的秩增加,公式(25)得出的关节加速度达到无限大,超过了电机的有效输出。针对机械臂在雅克比近奇异性或近似奇异性的情况,采用带有阻尼项的闭环控制方法:
添加Caccavale 方法来设定衰减项:
式中:σmin描述的是极小奇异数;′o 描述的是避障范围;λmax描述的是极大衰减系数。
4 实验分析
实验以国网北京物资公司为例,对本文提出的仓储运输机械臂分拣控制性能进行分析。物资仓储运输任务为将50 套配电箱运输至某配电网施工现场,仓库需进行自动拣货、出库装车、物资发运等工作。
为了验证所提方法对机械臂分拣控制有效性,进行实验。机械臂主要物理参数如表1 所示。
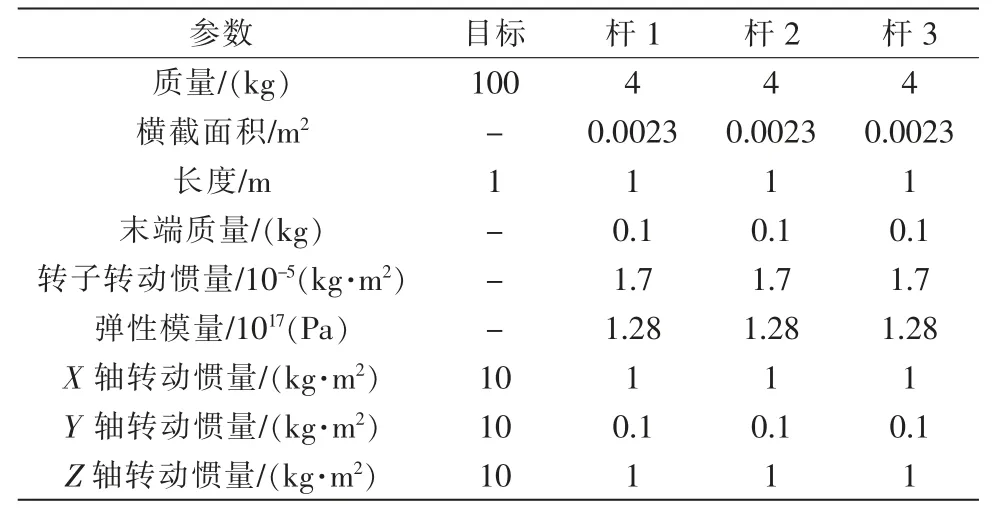
表1 机械臂及目标物理参数Tab.1 Mechanical arm and target physical parameters
4.1 关节位置约束对机械臂动力学特性的影响
验证仓储运输机械臂关节位置在约束和无约束条件下的分拣动态,采用-0.06 m/s 的匀速分拣方案,关节参数:100 N·m/rad、800 N·m/rad;动力学特性参数:接触碰撞刚性系数为103 N/m,接触碰撞衰减为0,关节速度衰减为0.1;初始参数:所有关节角、关节角速度都是0,分拣对象初始速度是0。
不约束与约束的分拣碰撞力曲线,如图2 所示。所谓的碰撞力,就是在惯性作用下,机器手臂末端和目标对象之间的撞击力。比较可以看出,当机器臂的末端抓手与目标对象发生碰撞时,约束的撞击次数比不约束要少,并且总体上的冲撞强度要小。
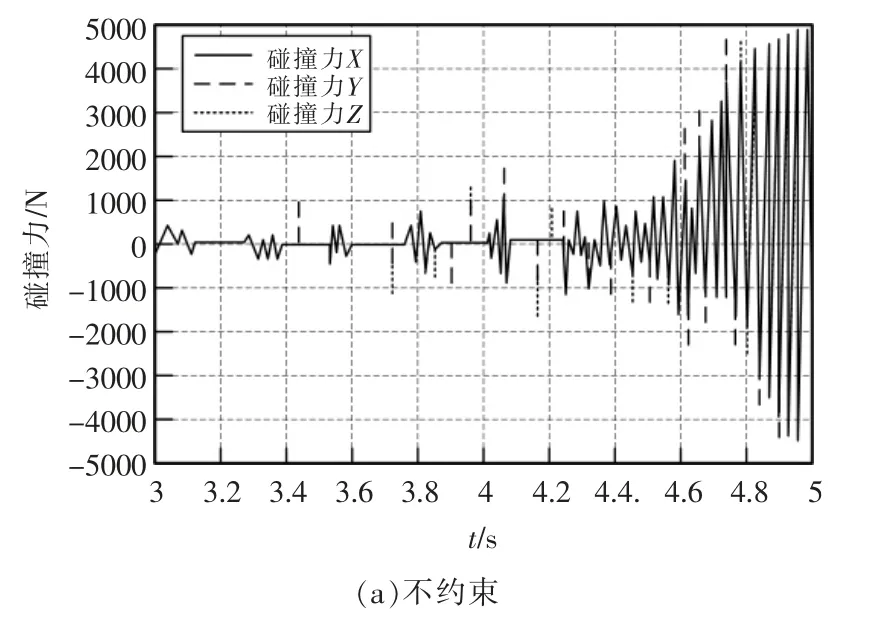
图2 不约束与约束分拣碰撞力Fig.2 Unconstrained and constrained sorting collision forces
分拣时关节角度不受约束和约束的电机角度,如图3 所示。通过比较可以看出,在分拣初期曲线是比较平稳的;在分拣最后,曲线就会出现抖动,这表明不进行关节位置约束分拣终端的振动干扰很大。但总体来看关节位置约束的振动相对较小,控制效果更好。
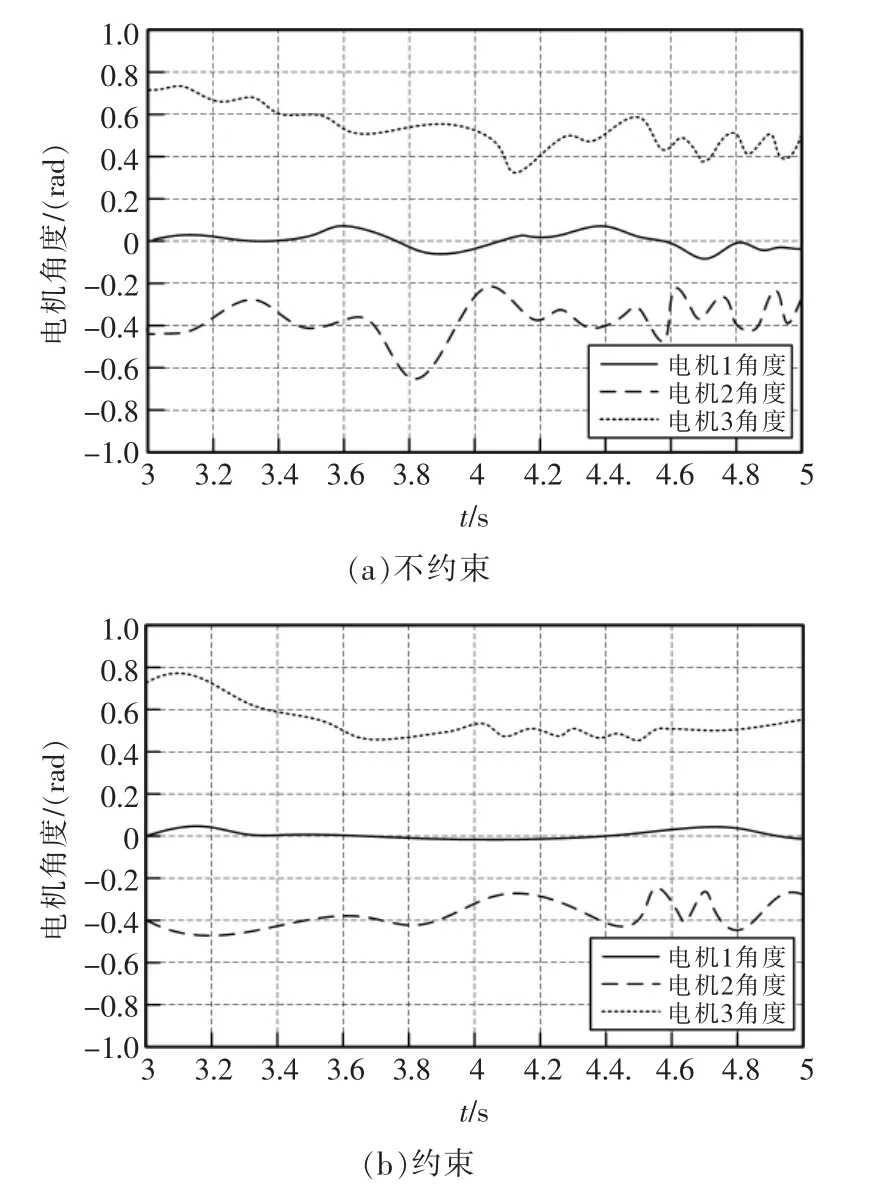
图3 不约束与约束关节角度Fig.3 Unconstrained and constrained joint angles
4.2 不同分拣控制策略影响
在考虑关节位置约束的条件下,对机器臂的分拣动态进行了研究,得到了匀速速率为0.06 m/s 和加速度为-0.024 m/s2,机器臂分拣跟踪曲线变化。
在加速度和匀速度两种分拣控制方案中目标的相对位置,如图4 所示。比较可以看出,两种分拣控制机器手臂的末端抓手都与目标对象发生了多次碰撞,但是,在加速中,第一次碰撞比匀速碰撞的次数和振幅都很小,没有出现过多波动,相对控制较好。

图4 不同分拣速度策略下目标相对位置Fig.4 Relative position of targets under different sorting speed strategies
在加速度分拣控制下的碰撞图,如图5 所示。当机器臂的末端抓与分拣对象发生碰撞时,加速运动的分拣控制会延迟大约0.5 s 的时间,而更大的碰撞力峰值则会降低,但是总体的撞击力会更小。
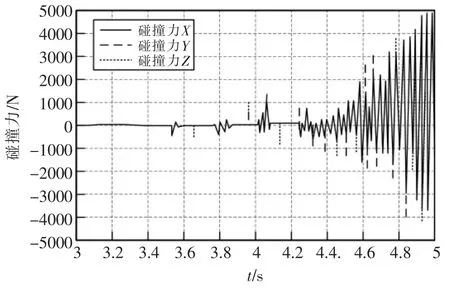
图5 加速分拣控制碰撞图Fig.5 Accelerated sorting control collision diagram
在使用加速度和匀速度分拣的情况下的关节变形角度,如图6 所示。比较可以看出,机械臂的加速分拣控制的关节变形角峰值接近于匀速分拣控制,但总体上来说加速度更小,并且振动频率更低。
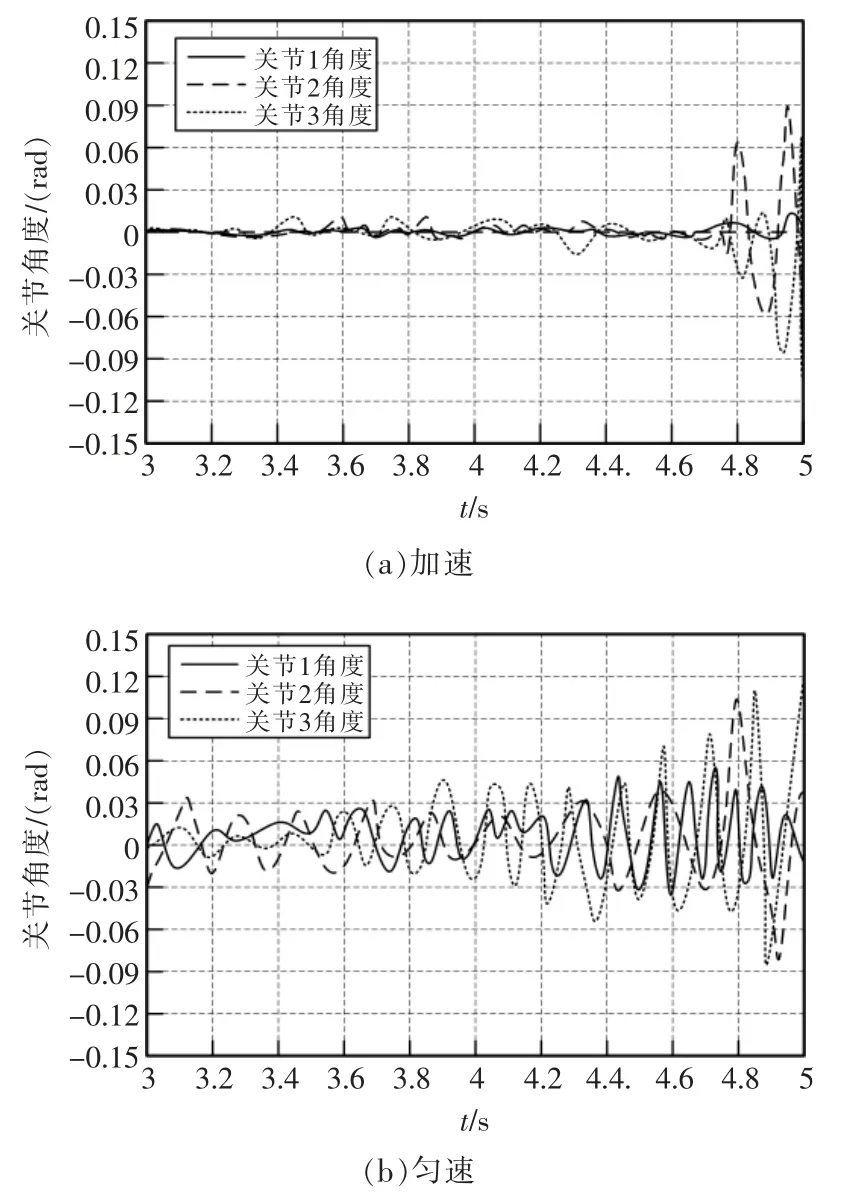
图6 不同分拣速度策略下关节变形角度Fig.6 Joint deformation angle under different sorting speed strategies
5 结语
国网物资公司仓储运输量较大,为减少运输成本,提高运营效率,必须从运输中心的内部分拣入手,因此本文提出了基于关节位置约束的仓储运输机械臂分拣控制。通过仓库分拣机器人手臂建模,对其进行最优控制,将待运输物资设备特性取样识别,并利用关节位置约束对机械臂控制,以确保分拣作业效率。实验结果表明该方法能够较好实现控制分拣,保证分拣的准确性。
猜你喜欢
环球时报(2022-07-13)2022-07-13 17:18:39
环球时报(2022-03-14)2022-03-14 18:19:44
商业2.0-市场与监管(2021年11期)2021-10-14 16:13:46
加油站服务指南(2021年4期)2021-07-21 02:29:22
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
电影(2018年8期)2018-09-21 08:00:06
科技与创新(2016年8期)2016-05-05 10:44:11
小猕猴智力画刊(2015年4期)2015-04-28 23:55:53
人生十六七(2015年6期)2015-02-28 13:08:38
上海理工大学学报(2012年3期)2012-03-20 13:54:43