
基于三维激光点云的电力线杆塔变形监测研究
2023-11-27 10:51王维坤蔡博文
科学技术创新 2023年27期
王维坤,张 乐,张 军,崔 雷,蔡博文
(安徽送变电工程有限公司,安徽 合肥)
前言
处于自然环境下的电力线在应用中很容易受到气象条件以及工况条件的影响,使得导线与地物之间的距离发生动态变化。在这一情况下,需要对与电力线相关的各项运行参数进行实时监测,才能够及时发现电力线运行中可能存在的各种问题,降低其中隐藏的安全风险和隐患,保障和提升电力线的运行安全具有积极的意义。
1 三维激光点云技术原理
将三维激光点云技术应用到电力线杆塔的变形监测当中,主要依赖于从激光点云数据中提取电力线悬挂点。在应用机载激光雷达技术的基础上,通过危险点检测的方式,直接获取测区地物上的大量三维空间坐标点集,这些数据被称为激光点云。现阶段应用的机载激光雷达系统,以获取激光点云数据为主要目标,能够充分发挥计算机和网络技术的作用,以数字化波形的方式来接收激光点云数据。将激光点云应用到电力线中,需要对电力线进行建模,才能够实现对电力线的弧垂模拟以及增容分析。
2 基于三维激光点云的电力线杆塔变形监测系统应用分析
基于保障电力线安全运行的需求,将三维激光点云融入到电力线杆塔变形监测系统的开发设计当中,在充分考虑三维激光点云技术原理的前提下,需要基于图1 所示流程来对电力线杆塔的变形情况进行监测分析。

图1 变形监测分析流程
本文在分析中,着重基于三维激光点云的原理,对电力线杆塔变形监测进行分析,主要选取以下几个方面来实现对于监测系统的规划:
2.1 点云数据预处理
电力线的架设和运行需要依赖铁塔来实现,电力线分布范围内除铁塔外通常不会再有其他地物。以往在对电力线进行巡检时,应用激光设备主要依赖第一次回波的点来获得激光数据,少部分情况下会只有一个回波的点。应用三维激光点云技术,在进行数据预处理时,首先需要剔除第一次回波外的所有多次回波点,用以减少后续处理的数据点和后续需要提取的线特征数量。然后将得到的数据在三维空间中以网格的方式进行划分。
网格的划分大小应不超过该线路电压登记所规定的地物安全距离最小值。例如,在220 kV 线路中,地物安全距离最小值为4 m。考虑电力线在实际运行中会受到重力以及气象条件的影响,在划分网格的过程中,应充分考虑电力线本身可能产生的弧垂状态,明确电力线不同的弧垂程度在网格中的范围。通常情况下,一根电力线在三维网格中占据的范围以9 个或6 个网格为主,网格较小则电力线的弧垂也较小,通常占据6 个网格。为除去点云数据收集中各种噪声点对数据分析的影响,考虑将存在子导线的电力线的点进行标记,在实际统计和分析中,需要将这些标记点去除,就可以达到过滤噪声点和非两维结构物体的目的,从而获得更准确的电力线的点[1]。
在对预处理后的点云数据进行分析时,发现在同一条电力线中,点云即便存在缺失,也能够体现出独特的空间特征,即在三维空间中,同一条电力线上相邻点云之间的高程不会受到相邻点云之间距离大小的影响,高程的整体变化范围较小,因而不会对电力线的表征判断和分析产生影响。如图2 所示,设定同层电力线中相邻点云高差为dz1,不同层电力线间点云高差为dz2,则可以依据P0、P1、P2等电力线的不同点到直线的距离来对电力线的表征进行判定和分析。
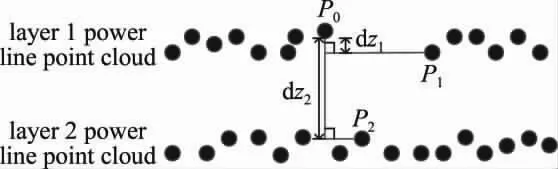
图2 同一条电力线上的表征
在此基础上,考虑同一条电力线中,点云本身能够具备2 个以上的空间特征,就可以基于较小的高差变化来达到分层提取电力线的目的。
2.2 电力线提取与杆塔位置确定
在完成点云数据的预处理后,需要提取三维网格中的电力线和确定杆塔的主要位置。假设三维激光点云的投影面为XY 投影面,为提取投影到二维平面上的直线,先应通过点云数据预处理去除电力线周围的噪声点,然后基于霍夫变换原理,将直线上的点转换为直线来达到提取二维平面上直线的目的。这一过程主要用以下方程来表示:
基于该方程,选取直线上任一确定的点,用(x0,y0)表示,则y0=kx0+b。这样就可以表示在参数平面(k,b)中的一条直线。基于这一原理,图像中的一条直线就可以对应参数平面中的一个点。
以霍夫变换的方式,将应用三维激光扫描获取的图像中的点映射到参数平面上,主要对参数平面中相交直线的个数进行统计。如果相交的直线个数能够达到一定标准,就可以将其视为线段。对相交点较多的直线,则需要按照相交直线最多的标准来进行线段的选择。而由于在这一过程中,难以用y=kx+b代表x=c,因而在实际应用中,考虑以如下方程来对该情况进行表示:
这一方法检测多条直线段,可以在充分考虑电力线特征的情况下筛选出合适的电力线。考虑实际的电力线分支和形式较多,在将其投影到参数平面后,会出现多条相互平行且长度相同的直线。在应用激光扫描设备沿着巡线获取激光点云数据的情况下,激光点云能够呈现出沿着被检测线路分布的特点,在这一情况下,被电测电力线在投影平面上的直线最长。基于此,可以及时剔除由于霍夫变换提取出的非电力线的线段。
完成投影面中电力线的提取后,通过延长这些电力线的方式,可以让不同的电力线相交,得到的交点位置即为杆塔的位置。在同一投影面有多条相交线的情况下,取距离线断电最近的交点为对应的线。应用这一原理,可以直接搜索和标注电力线有转角的杆塔的具体位置[2]。
2.3 电力线分割与建模
在确定XY 投影面上电力线的直线参数后,应考虑误差情况对电力线断面以及杆塔位置产生的影响,在计算电力线所在断面的情况下,应在XY 投影面为断面预留一定的宽度,让其能够包含更多的点云数据。在充分考虑电力线子导线之间距离以及激光扫描设备误差影响的前提下,将预留宽度设置为20 cm,以规划一根电力线抛物线方程的方式,可以应用以下公式来表示:
考虑实际每个断面的电力线数量较多,且每条电力线的4 根子导线有两根在水平方向处于重叠状态,进而产生多条抛物线,可以采取平均分段和从高到低的策略,以同时进行断面电力线的分割和抛物线拟合为主要方法,获取更符合实际情况的电力线。
在此基础上,可以根据断面的左边界到右边界将其平均划分为5 段,取每段中的最高点,则可以得到5个点。然后需要根据最小二乘法拟合的原理,在及时去除可能影响拟合效果的噪声点后再进行处理。在得到的拟合结果中找到符合实际电力线运行情况的抛物线后,需要结合电力线的断面来对电力线与抛物线之间的垂直距离进行计算。为实现对垂直距离的衡量分析,考虑以子导线纵截面的两倍作为衡量距离大小的标准,未达到这一标准距离的点,则可以认为是抛物线的激光点。在此基础上,可以构建抛物线方程,将高于抛物线的点作为噪声点进行过滤处理。而剩下的点,则需要在此进行电力线方程的计算,对划分的五个阶段中缺少激光点的情况,则可以证实该电力线已经完成迭代建模。
2.4 实验过程
基于三维激光点云的原理,在对电力线杆塔进行电力监测的过程中,选择某电力线铁塔进行实验分析。应用Trimble TX8 三维激光扫描仪来对铁塔进行扫描,以拟合抛物线的方式,获取铁塔中心坐标,再分别提取电力线和铁塔关键部分的点云数据,借助特征拟合的方式来获得更准确的几何参数,就可以对铁塔不同位置到铁塔轴线的偏差距离进行计算分析。
基于这一目的,首先需要对应用三维激光扫描仪获得的数据进行点云配准和降噪精简处理。然后截取铁塔不同部位的界面,以圆柱拟合的方式提取机电坐标值,可以获得相应的拟合参数。以铁塔的关键部位中心坐标值为例,如表1 所示。
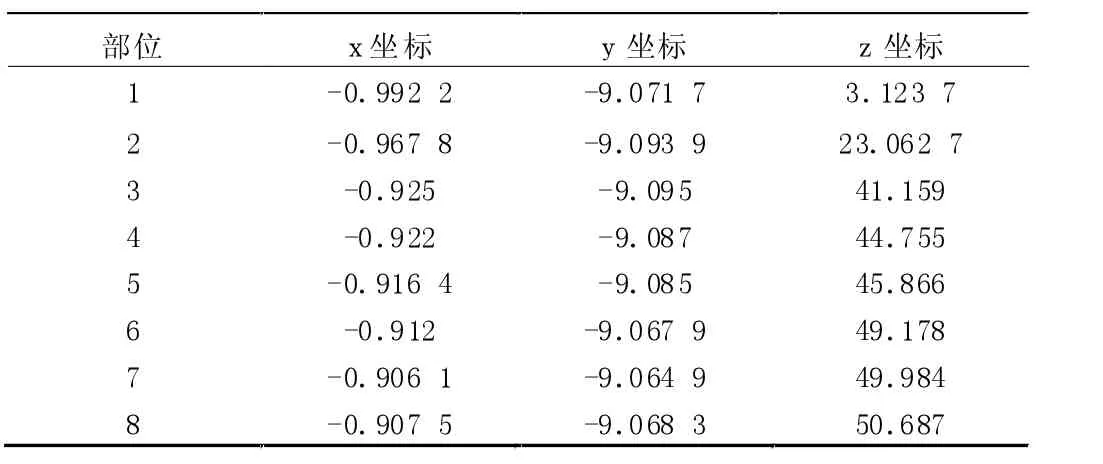
表1 铁塔关键部位中心坐标值(单位:m)
在获得以上中心坐标值后,通过特征拟合的方式,求出不同部位中心作表语铁塔底部中心的坐标偏移量(如表2),就可以对铁塔的倾斜度进行计算(如图3)。

表2 铁塔关键部位中心坐标偏移值(单位:m)
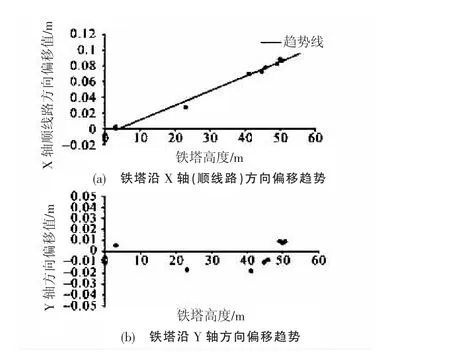
图3 铁塔倾斜度及偏移趋势
在明确该铁塔总高为51 m 的前提下,结合实验监测获得的数据可以发现,该铁塔在Y 轴方向上的偏移值在18 mm 左右,在X 轴方向上的偏移值则能够与铁塔高度之间呈现出较为明显的线性关系,在铁塔结构高度不断增高的情况下,其变化趋势也在不断增大。而在对铁塔的倾斜度进行计算后,发现地线横担处的倾斜度最大,在0.17%左右。这一倾斜度在正常的杆塔倾斜阈值内,因而能够保障铁塔的安全运营。
2.5 基于三维激光点云的监测算法应用
为充分发挥三维激光点云的作用,可以借助算法来实现对悬挂点空间坐标以及倾斜度的计算,也可以实现电力线运行和应用情况的模拟。在对电力线进行运行监测的过程中,借助算法提升计算结果的准确性,及时发现输电通道存在的潜在缺陷和问题,实现对于相关区域的自动化监测,主要可以借助悬挂点来实现对电力线的精确定位。具体而言,在对电力线点云空间特征进行分析的基础上,让其以公式化的方式表达出来,进而提出针对电力线点云空间的约束条件,将其作为生长准则,以空间约束区域生长分割的方式,将单根电力线点云从跨越多档的电力线中分割出来,提升电力线点云分割的准确性和完整性,能够为悬挂点的精准定位提供良好的支持[3]。
3 结论
总之,在实际应用该技术对电力线杆塔的变形情况进行监测时,应充分考虑电力线以及杆塔所在的自然环境条件,对比设计图纸中的悬挂点与实际悬挂点的位置出入情况,借助激光点云数据来获取更准确的电力线和干扰悬挂点坐标。在确定电力线以及杆塔位置后,通过分割和建模的方式,将电力线的运行过程模拟出来,用于对其可能产生的变形情况进行监测和分析。
猜你喜欢
中国化肥信息(2022年3期)2023-01-05
现代职业教育·高职高专(2020年3期)2020-08-16
阅读与作文(小学低年级版)(2020年2期)2020-05-25
成功(2018年11期)2018-12-28
成功(2018年10期)2018-12-26
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
电测与仪表(2015年21期)2015-04-09
时代农机(2014年11期)2014-09-23
电测与仪表(2014年13期)2014-04-04
