
Research on Collision Risk Between Light Unmanned Arial Vehicles and Aircraft Windshield
2023-11-22 09:11,,,,
,,,,
1.School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, P.R.China;
2.College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, P.R.China;
3.Shanghai Aircraft Airworthiness Certification Center, Shanghai 200335, P.R.China
Abstract: With the increasing unmanned aerial vehicles (UAVs) applications, quite a few major aviation incidents and dangerous symptoms have occurred in the vicinity of the airport and the airspace, and air transportation safety is facing a huge potential threat from unorder flight of UAVs.An important aspect regarding the collision risk between a typical UAV and the windshield of a commercial aircraft is investigated.The damage classification and corresponding impact energy range considering the weakest area on the aircraft windshield are obtained via finite element simulation under the most severe condition.According to the simulation results, the damage severity rank can be classified conservatively.In the absence of intervention from air traffic control, Monte Carlo simulation is performed to obtain the collision probability between a UAV and an aircraft with their independent motions by considering the joint constraints of the minimum horizontal safety separation, the minimum lateral safety separation, and the minimum vertical safety separation.In addition, the collision probability levels are also estimated.Based on various combinations of damage severity classifications and collision probability levels, a more conservative qualitative risk matrix is defined regarding collision between a UAV and an aircraft windshield.In general, the results indicate that the collision risk and damage severity are low when the UAV and the aircraft are flying at the height of less than 120 m and a distance of over 3 600 m on the condition of a typical heading angle and a pitch angle, otherwise these factors become serious.This investigation would provide a theoretical basis and practical reference for the normative design and manufacture of UAVs, the policy formulation by authorities on UAV operation control, as well as the risk assessment of UAVs and manned aircraft operating in the same airspace.
Key words:unmanned aerial vehicle(UAV); aircraft windshield; collision probability; damage severity; energy level; risk matrix
0 Introduction
Currently, unmanned aerial vehicles (UAVs)are widely employed in various fields, such as plant protection, electric power inspection, emergency and disaster mitigation, meteorological monitoring,resource surveying, traffic patrolling, ecological mapping, aerial photography, logistics transportation, and municipal administration.With the extensive application of UAVs, new issues have emerged.One of the major hazard is the collision threat on manned aircraft flying in the same airspace because of the unorderly flight of UAVs.Systematic research and empirical studies on the consequences of the collision threat have been conducted in the United States[1-2].Investigating the collision or dangerous approaching incidents of UAVs and aircraft publicly reported worldwide, several collision and scuffing incidents have occurred in the United States, Canada, Mozambique, EU member states,and other countries and regions, which resulted in aircraft damage or casualties[3].Although no collision incident between UAVs and aircraft has ever been reported in China, abnormal events caused by“black flight”, such as delay and cancellation of flights, aircraft route diversion, alternate landing,and even airspace closure[4], may greatly affect the operation safety and economic benefits of air transportation, and are extremely sensitive to the public for aviation safety.According to the provisions in the Interim Regulations on the Flight Management of Unmanned Aerial Vehicles (Draft for Comments) issued by the Civil Aviation Administration of China(CAAC)[5], the light UAVs in this work refer to remotely piloted aircraft with an empty mass of ≤ 4 000 g, a maximum takeoff mass of ≤ 7 000 g, and a maximum flight speed of ≤ 100 km/h (28 m/s).
At the design phase, the aircraft should verify the airworthiness of structural against foreign objects impact (e.g., bird strikes).However, as a emerging scenario with extensive applications, specifications of UAV design and manufacturing are still in the legal “vacuum zone”[6].Moreover, it is tricky to formulate universal airworthiness provisions applicable to test verification practice on the impact resistance of aircraft against UAVs.UAV operation is now supervised via relevant administrative procedures issued by the airworthiness authorities in various countries, which would be hoped to facilitate the continuous development of the UAV industry and to ensure collaborative flight safety of manned aircraft and UAVs in the same airspace simultaneously.However, collision or dangerous approaching incidents between UAVs and aircraft still usually occur, which implies to significantly investigate a risk assessment of collisions between UAVs and aircraft.
As far as the possibility of collision is concerned, several investigations on the collision hazard between UAVs and aircraft in the same airspace have been conducted, for which methods such as numerical calculation simulation and dynamic simulation demonstration have been predominantly adopted.Further, the research focuses on the modeling of aircraft collision hazards based on environmental factors[7-13], optimization of aircraft safety separations based on acceptable risks[14-19], flight conflict avoidance, and track dynamic planning[20-24].However, reliable prediction models cannot be gained to assess the variation in collision risk factors, owing to the lack of comprehensive data in civil aviation regulatory authorities of various countries, such as an accurate quantity of UAV ownership, actual flight frequency, collision accident report, and the avoidance ability of aircraft.Regarding damage severity, different configurations, flight attitudes, relative speeds,impact positions, and other factors of UAVs result in great discrepancies in the severity of structural damage[1,2,25].Therefore, it is impossible to formulate a unified grading standard for UAV/aircraft damage severity.In addition to the dynamic simulation, test verification requires a long period and high cost, resulting in relatively rare achievements on the collision damage between UAVs and aircraft structural components.The main windshield on an aircraft is the largest component of windward side with great probability of being struck by foreign objects.When the load-bearing windshield glass is damaged,severe consequences will occur to the flight crew and operation.Currently, the major research works focuses on the mechanism of the collision between UAVs and aircraft windshields[25-26], model validation[25,27], comparative study with bird-strike results[28-29], and critical condition of collision damage on a windshield for a specific type aircraft[1-2,30-32].According to the existing and closely related research literatures, safety and risk assessments considering both collision probability as well as damage severity of UAVs and aircraft are scarcely conducted.Most studies focuses on the collision hazard between UAVs and aircraft in the same airspace, as well as the damage from collisions between UAVs and aircraft metal structural separately.In the aforementioned cases, due to the space limit of the test apparatus, either most UAVs are simplified or collision conditions of more severity are not considered, leading to distortion to some extent in the results.
Although the hazard analysis of UAVs ingested by aero-engines also constitutes a significant content in safety analysis of UAV crashworthiness, the research here is limited to safety and risk investigations and progress analysis of collisions between UAVs and the main windshield of aircraft.A risk matrix of collisions between UAVs and aircraft windshields is achieved by considering two dimensions including both the probability level and the damage severity rank of the collision with extreme posture of UAVs.Accordingly, the collision risk levels would be subjectively classified, and the conservative critical conditions for supervising UAV operation are determined.
1 Damage Rank of Collision Between UAVs and Aircraft Windshields
1.1 Introduction of UAV structure
The UAV studied here is the Phantom 4 Pro,which currently has the largest share in the market of light UAV applications.This model of UAV is produced by DJI and has been broadly adopted in laboratory investigations on collision safety in the United States, Britain, and other countries.The corresponding UAV configuration and major components are demonstrated in Fig.1, and the constructional materials of the major components are listed in Table 1.Details on UAV modeling are elaborated in Ref.[33].
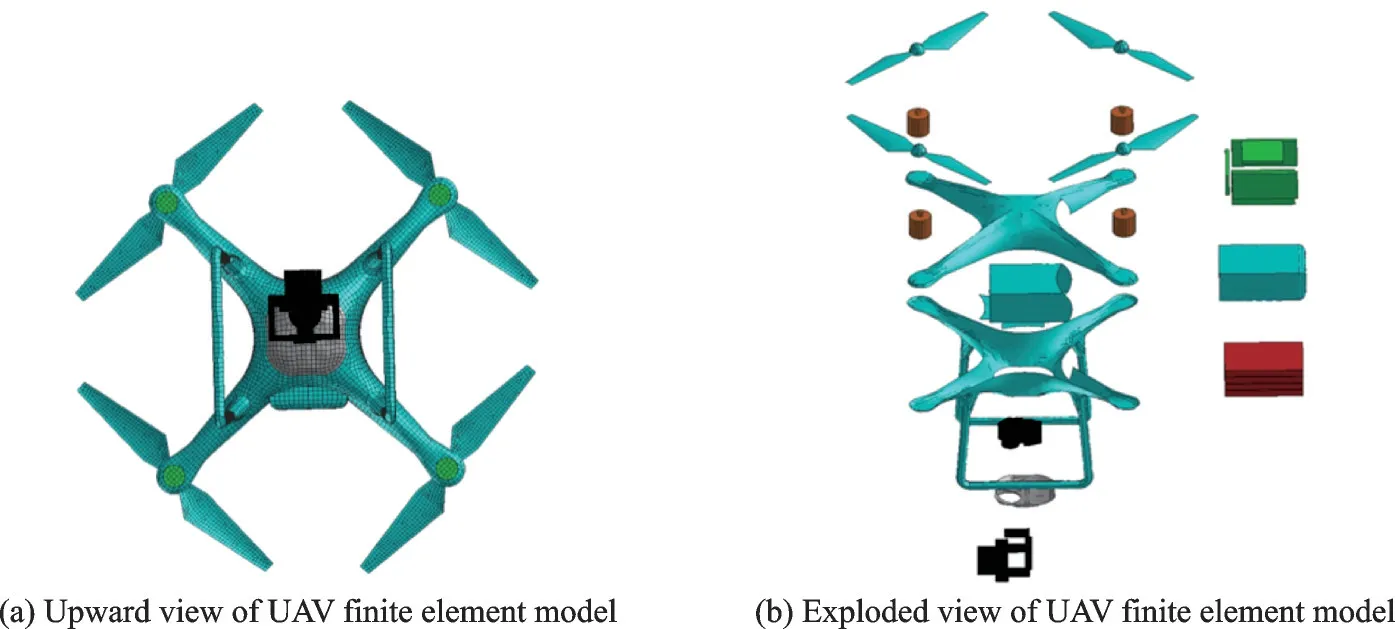
Fig.1 Configuration and major components of UAV
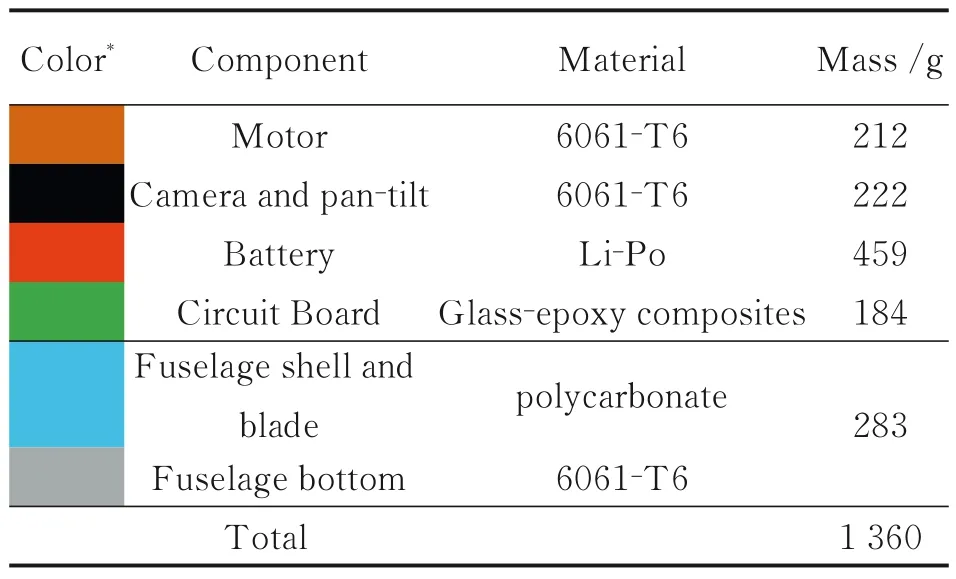
Table 1 Materials of major components of the UAV
1.2 Introduction of aircraft windshield structure
The main windshield of a commercial aircraft consists of three layers of glass and two layers of sandwich films.With edges wrapped by silicone rubber, the three layers of glass are made of inorganic toughened materials, while the two layers of sandwich films of polyurethane (PU) and polyvinyl butyrals(PVB) are constituted of organic materials.As shown in Fig.2, L1 is the outer glass which is the non-load-bearing structure with the thickness of 3 mm.L2 and L3 are the middle and inner glass, which are the load-bearing structure with thicknesses of 8 and 6 mm, respectively.PU and PVB are glue layers with thicknesses of 4 and 1.5 mm, respectively.In order to ensure the integrity of the collision simulation model, the full-size model of the aircraft nose structure including the major windshield components is exhibited in Fig.3.Details on the nose structure modeling, including the windshield, are separately elaborated in Refs.[25,33].
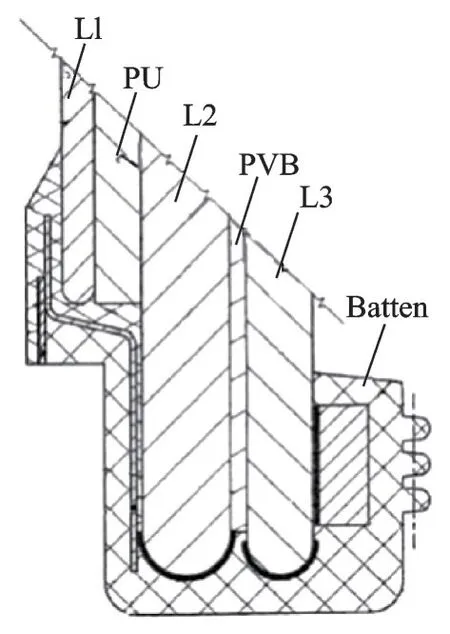
Fig.2 Section view and main components of windshild
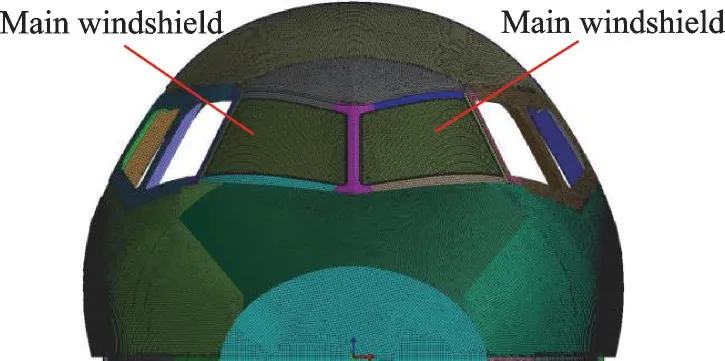
Fig.3 Model of a full-size nose of a commercial aircraft
1.3 Collision damage classification of aircraft windshields
According to the operation standards of aircraft manufacturers, a few cracks are tolerable at the outer glass of the non-load-bearing structure, as long as the vision for flight is not affected.No cracks are allowed at the middle and inner glass of the load-bearing structure.Particularly, a crack on the inner glass would threaten the equipment and personnel.Therefore, the damage rank of windshield can be successively classified into outer-layer glass crack (minor), outer-two-layer glass crack (dangerous), and three-layer glass crack(disastrous).In terms of the results of the high-speed collision between a light UAV and an aircraft windshield (same to here), acquired previously by the research team (see Ref.[25] for details), the most vulnerable position of main windshield and the harshest posture of UAV via dynamatic simulations have been achieved when a UAV with the posture of pitching rearward 45°and a yawing right 24.4° along the heading direction of the aircraft striked the middle region of the windshield.As illustrated in Fig.4, the damage rank of collision between the UAV and the aircraft windshield is conservatively assessed in this case.
Fig.4 Impact posture of UAV and position of windshield impacted
1.4 Critical conditions of damage classification in collision simulations
According to the existing results acquired in Ref.[25], the three layers glass had cracked entirely with the collision velocity of 151 m/s which superimposed the relative velocities of the UAV and the aircraft corresponding to the height of aircraft below 3 000 m mean sea level (MSL) to conform the FAR 91.117(a)[34]and CCAR 91.323(a)[35].Therefore, by gradually decreasing the collision speed with the constant UAV flight speed of 20 m/s, the critical collision velocity corresponding to cracking in each layer glass can be obtained.Based on the aforementioned scheme, the damage of each layer glass on the windshield under typical collision conditions is listed in Table 2.
According to the simulation results in Table 2,as the UAV strikes the most vulnerable region on the windshield along the heading direction of the aircraft with the harshest posture, the conservative critical speeds of cracking of the outer layer glass, two outer layer glasses, and three layer glasses are 72 m/s,85 m/s, and 128 m/s, respectively.
1.5 Energy level of collision between UAVs and aircraft windshields
Based on the simulation results of UAVs colliding with aircraft windshields in Section 1.4, the critical speeds and corresponding energy range of different damage classifications from the collision between a typical light UAV and an aircraft windshield under extreme condition are listed in Table 3.The damage classifications are denoted as EC1,EC2, EC3, and EC4 according to the damage extent from slight to severe.
Table 2 Damage of each layer glass on the windshield under typical collision conditions

Table 3 Damage classification of windshield impacted by UAVs
2 Probability Level of Collision Between UAVs and Aircraft windshields
2.1 Modelling of collision probability
The track of a commercial aircraft flying along its route is regulated in a virtual pipeline (e.g.,Reich model) to eliminate track conflicts or even collisions between aircraft.The regulation involves retaining reasonably longitudinal, lateral, and vertical separations for the aircraft in the three-dimensional (3D) track pipeline.In this work, considering the short dangerous-approaching distance between UAVs and aircraft, uniform linear motion of aircraft without positioning error during the transitorily approaching time is assumed.Meanwhile, in view of the relatively low flying speed of UAVs, it is regarded as a random motion particle.The motion states of the UAV and the aircraft are independent without mutual interference.On this basis, the motion models of the UAV and the aircraft in both orthogonally horizontal and vertical projection planes are established.Factors such as track alteration and conflict avoidance of UAVs and aircraft by air traffic controllers are not considered.The positional relationship between the UAV and the aircraft in the 3D orthogonal coordinate system is depicted in Fig.5.
Fig.5 Space position schematics of a UAV and an aircraft
In the 3D coordinates, pointsAandBindicate the positions of the aircraft and the UAV in flight space, respectively.Vonly indicates the space vector of the aircraft flight velocity and has no meaning of the velocity in a specific plane in Fig.5.In the initial state, the linear distance between the geometric centers of the UAV and the aircraft isDwhose length in horizontal projection plane isd.PointA' is the projection of pointAin the same horizontal plane including pointB, and pointB' is the projection of pointBin the same vertical plane including pointA.The relative heading angle of the aircraft to the UAV in the horizontal projection plane isα∈[-π,π], and the relative pitch angle of the aircraft to the UAV in the vertical projection plane isβ∈[-π/2,π/2].The motion of UAV is simplified as Gaussian distribution in the horizontal and vertical projection planes, and the various uniform horizontal motions of the aircraft in different flight phases and the single uniform vertical motion in multiple flight phases are assumed.Considering the size effects of the UAV and the aircraft, the volume parameters (length ×width × height) of the UAV and the aircraft are assumed asa1×b1×c1anda2×b2×c2, respectively.Therefore, the spacing errors in the horizontal and vertical projection planes resulting from the volume parameters of the UAV the and aircraft are
At timetfrom the initial state, the random dynamatics differential equations of the UAV and the aircraft in the horizontal projection plane are given by
whereL(t) andL(0) are the horizontal distance of aircraft having flown relative to UAV at timetand at the start time, respectively;Vh(t) is the various average velocity of the aircraft in the horizontal projection planes corresponding to different flight phases;Uh(t) is the horizontal velocity of the UAV in standard Gaussian motion withE[Uh(t)]=0 andD[Uh(t)]=σ2h, in which the value ofσ2his determined by the horizontal velocity of the UAV.Therefore, the distanceR1(t) between the UAV and the aircraft in the horizontal projection plane at timetfrom initial state can be expressed as
According to Fig.5, the lateral distanceR2(t)of the UAV relative to the aircraft heading in the horizontal projection plane can be written as
In the horizontal projection plane, if the horizontal distanceR1(t) or the lateral distanceR2(t) is less than the specified minimum safety separation,it is considered that collision has occured between the UAV and the aircraft in the horizontal plane.
At timetfrom the initial state, the random dynamatics differential equations of the UAV and the aircraft in the vertical projection plane are given by
whereH(t) andH(0) are the vertical distance of aircraft having flown relative to the UAV at timetand at the start time, respectively;Vv(t) is the single average velocity of the aircraft in the vertical projection planes in multiple flight phases;Uv(t) is the vertical velocity of UAV in standard Gaussian motion withE[Uv(t)]=0 andD[Uv(t)]=σ2v, in which the value ofσ2vis determined by the vertical velocity of the UAV.Hence, the distanceR3(t) between the UAV and aircraft in the vertical projection plane can be expressed as
whereHis the vertical distance between the UAV and the aircraft at the start time.IfR3(t) is less than the specified minimum safety separation, it is considered that collision has occured between the UAV and the aircraft in the vertical plane.
2.2 Solution of collision probability model
R′1,R′2, andR′3are adopted to represent the horizontal, lateral, and vertical safety separations, respectively.Within the total time oft=k× Δt(wherekis the step number of time increments), the decisive indicators for the collision between the UAV and the aircraft regarding the horizontal, lateral, and vertical distance, i.e.,f1,f2, andf3, are defined as
At timet, when ((f1=0 orf2=0 ) &f3=0)is fulfilled withα∈[- π/2, π/2] or (f1=0 &f3=0) is fulfilled withα∈[-π, -π/2] andα∈[π/2, π], it is considered that collision occurs between the UAV and the aircraft in 3D space.With a total simulation times, the simulation flowchart, presented in Fig.6, is determined according to the schemes in Sections 2.1 and 2.2.
2.3 Simulation results of collision probability
Fig.6 Numerical simulation flowchart of collision probability
According to the introduction in Section 2.1,the related parameters of the UAV and the aircraft used in the simulation of collision probability are listed in Table 4.The UAV can reach the maximum height from the ground of 500 m in terms of the design performance.Now, the permissible flight height of the UAV is 120 m due to flight control.Meanwhile, as the flight speed range of the UAV is small, the UAV can promptly attain a stable speed and be simplified a random particle motion.However, the speed range of the aircraft varies greatly from taxing to cruising with different flight speeds in various flight phases, corresponding to which different average horizontal flight speed in each phase should be definited.The average horizontal velocities of the aircraft in Table 4 are compared with the critical collision speeds in Table 2 that cause cracking on each layer glass in turn, which indicates that the critical collision speed resulting in cracking of all three layers glass of the windshield corresponds to a height range of 120—500 m and climbing stage of aircraft according to its flight performance and speed envelope.Without consideration of flight control, a collision between the UAV and the aircraft would be very likely to happen.Therefore, collision simulation of the aircraft with the speed of 108 m/s (deriving from(128-20) m/s) is considered conservatively here.Likewise, the critical collision speed at which the outer-two layers glass of the windshield cracked corresponds to a height range below 120 m and taking off stage of aircrft, in which the collision risk between the UAV and the aircraft would really exist.Therefore, three critical velocities of the aircraft that cause cracking of each layer glass of the windshield in turn, i.e., 52 m/s, 65 m/s, and 108 m/s,are considered in the simulation.
With reference to relevant technical documents and literatures[36-37], the selected parameters in the simulation for flight safety separation in the aircraft terminal control area are listed in Table 5.
AssumingD= 10 000 m, the collision probabilities with various combinations ofαandβin their ranges and velocity of 128 m/s are displayed in Fig.7.It is clearly showed that the collision probability between the aircraft and the UAV would reach the maximum whenαandβare equal to zero,which is also in conformity with the common sense.

Table 4 Horizontal and vertical speeds of different models
Table 5 Safety separation parameters in the simulation
Based on Fig.7 and previous study[37], the typical scenario ofαandβbeing equal to 30° is considered to conservatively estimate the risks of dangrousapproaching and collision between the aircraft and UAV without considering any avoidance strategies.

Fig.7 Collision probability of combination with various angles

Fig.8 Relationship between spatial distance and collision probability of UAV and aircraft with different speeds
The relationship in the collision probability and the initial space distanceDbetween the aircraft and UAV are displayed in Fig.8.The SAE ARP 4761 standard[38]is cited by the Coordination Working Group on General Structure of Transport Airplanes in FAA Aviation Rulemaking Advisory Committee.Qualitative and quantitative safety indicators including the consequences of different failure modes, the severity classification of failure states, and the acceptable probability of occurrence defined by Federal Aviation Administration (FAA) and Joint Aviation Authorities (JAA) are adopted in the cited standard: (1) The adverse effects, which slightly reduce the safety margin, slightly increase the workload of the flight crew, or render certain inconvenience on the passengers, fall into the category of minor damage or failure conditions with an allowable occurrence frequency as quite likely and an occurrence probability of ≤ 10-3; (2) the adverse effects, which notably reduce the safety margin or functional capability, notably increase the workload of the flight crew, affect the crew efficiency, or render certain discomfort on the passengers, fall into the category of hazardous damage or failure conditions with an allowable occurrence frequency as seldom and an occurrence probability of ≤ 10-5; (3)the adverse effects, which greatly reduce the safety margin or functional capability, impose greater workload and physical pain on the flight crew that cannot execute tasks accurately and completely, or adversely impact the passengers, fall into the category of severe damage or failure conditions with an allowable occurrence frequency as rare and an occurrence probability of ≤ 10-7.According to the aforementioned indicators of damage and safety, the spatial distance and collision probability between the UAV and the aircraft corresponding to the windshield damage classification with different collision conditions listed in Table 3 are depicted by the three solid curves corresponding to different marks in Fig.8, assuming that cases in which the UAV strikes the aircraft windshield accounts for 10% of the total collision incidents between UAVs and aircraft referring to the 30-year statistical results(about 15%) of birds striking the aircraft windshield[39].
To unify the variation relations between spatial distance and collision probability of the UAV and the aircraft with different speeds, the dotted line of collision probability in Fig.8(b) is obtained in view of conservative safety targets.Thereby, the collision probability level is classified to acquire the corresponding probability ranges of collision for the aircraft windshield.The probability classification are denoted as PC1, PC2, PC3, and PC4 according to the probability magnitude from low to high and the range divisions corresponding to each level of collision probability are presented in Table 6.

Table 6 Probability interval corresponding to possible collision level
3 Collision Risk Between UAVs and Aircraft Windshields
Referring to the Guidelines for Risk Assessment of Airworthiness Certification Projects of Civil UAV Systems(Trial)[40], two indicative dimensions, i.e., probability level and damage rank, are selected to express the collision risk of a typical UAV and a commercial aircraft windshield.According to the results shown in Tables 3,6, the collision risk matrix for the UAV and the aircraft flying in the same sub-airspace with both pitch angle and heading angle of 30° is exhibited in Table 7.The yellow zone indicates low risk (R1), the orange zone indicates medium risk (R2), and the red zone indicates high risk (R3).Therefore, in terms of different acceptable risk zones, the corresponding ranges of collision energy and the unregulated spatial distance between the UAV and the aircraft can be determined reversely.

Table 7 Collision risk matrix between typical linght UAV and windshield of an aircraft
4 Conclusions
The collision probability and energy levels corresponding to various damage severity ranks of a typical light UAV and a commercial aircraft windshield during flying in the same sub-airspace at a certain altitude are analyzed.With the lack of further test verifications and sufficient supports from simulation results regarding more actual conditions, the results can provide conservative but rational understandings of collision risks between UAVs and aircraft.The following conclusions can be drawn.
(1) If the distance between the UAV and the aircraft is more than 3 600 m before the aircraft takes off corresponding to the energy level EC1 of impacting, or more than 5 700 m under the flight height of 120 m corresponding to the energy level EC2 of impacting, the collision probability and damage severity are acceptable in general, which means low risk.
(2) If the distance between the UAV and the aircraft is greater than 2 200 m before takeoff corresponding to the energy level EC1 of impacting,more than 3 600 m under the flight height of 120 m corresponding to the energy level EC2 of impacting, or more than 5 700 m above the flight height of 120 m corresponding to the energy level EC3 of impacting, the collision probability and damage severity present great risks, which means moderate risk and that avoidance measures should be taken for the mitigation.
(3) If the distance between the UAV and the aircraft is less than 2 200 m before takeoff corresponding to the energy level EC1 of impacting, less than 3 600 m under the flight height of 120 m corresponding to the energy level EC2 of impacting, or less than 5 700 m above the flight height of 120 m corresponding to the energy level EC3 or EC4 of impacting, the collision probability and damage severity indicate grave risks, which means high risk and measures like electronic fences or conflict alerts should be taken to avoid collision incidents.
(4) It has been studied that the windshield was impacted respectively by the UAV and a four-pound bird with the same kinetic energy in Ref.[25].The results showed that there was no damage to the windshield when the bird impacted the windshield at a speed of 132.7 m/s.Therefore, combined with the achievements in this paper, the windshield of the aircraft is safe after being impacted by a fourpound bird below 500 m.
This work provides a conservative method for risk assessment of mid-air collisions between a typical light UAV and commercial aircraft windshield.Because of the incomplete information on the existing UAV products registered in official website of Civil Aviation Administration of China(CAAC) as well as the lack of statistical information on the collision incidents between UAVs and aircraft, the energy distribution function of collisions with various models of UAV cannot be obtained, and the proposed collision probability model is a little impecfect.Therefore, the accuracy of quantitative analysis and the rationality of the risk assessment matrix for collisions between UAVs and aircraft windshields require further improvement.In general, the results of this study provide a significant insights for engineering practices in the normative design of the light UAV industry.Additionally, these findings can offer open referential effects on the decision-making for the civil aviation regulatory authorities.
 Transactions of Nanjing University of Aeronautics and Astronautics2023年5期
Transactions of Nanjing University of Aeronautics and Astronautics2023年5期
- Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Numerical Study on Flow and Heat Transfer Characteristics Inside Rotating Rib-Roughened Pipe with Axial Throughflow
- Machine Learning-Based Gaze-Tracking and Its Application in Quadrotor Control on Mobile Device
- A Stochastic Modeling Method of Non-equal Diameter Pore with Optimal Distribution Function for Meso-structure of Atmospheric Ice
- A Monte Carlo Lagrangian Droplet Solver with Backpropagation Neural Network for Aircraft Icing Simulation
- Real-Time Optimal Control for Variable-Specific-Impulse Low-Thrust Rendezvous via Deep Neural Networks
- Effect of Broaching Machining Parameters on Low Cycle Fatigue Life of Ni-Based Powder Metallurgy Superalloy at 650 ℃