基于VMD 的智能机器人语音信号特征参数提取方法
2023-11-21 14:12金豪圣
电子设计工程 2023年22期
金豪圣
(国网浙江省电力有限公司信息通信分公司,浙江杭州 310000)
人们对于人工智能已经进行了数十年的研究,在人工智能领域,智能机器人是重要的研究课题之一。智能机器人研发主要包括语音识别、图像识别、语言处理等内容,随着语音搜索的不断普及,语音搜索的重要性也越来越高,因此相关学者针对语音信号特征参数提取这一问题进行了深入研究[1-3]。
对于智能机器人的语音信号特征参数提取的方法,文献[4]采用融合递归求逆滤波识别技术,解决复杂场景识别办法,通过对全场景的准确识别确定语音滤波效果,但是需要频繁使用滤波器。文献[5]采用广义交叉阈值同步压缩小波方法,估计降噪的阈值水平。通过基于峭度测量的预处理和基于自适应硬阈值的后处理,能够精确地提取超声信号特征,但该方法的提取时间较长。
为了解决上述三种方式的缺陷,文中提出了基于VMD 的智能机器人语音信号特征参数提取方法。
1 数学模型建立
为了提取智能机器人语音信号的特征参数,文中提出了智能机器人语音信号特征参数数学模型[6-7]。由于智能机器人大多具有统一性,因此智能机器人的语音信号的脉冲模型G(z)表示如式(1)所示:
其中,z表示分析的数字信号;ℓ 表示脉冲系数。
智能机器人语音信号中的激励信号在实时性系统中进行数据传输,其中的传递函数通常为极点模型,因此,如果智能机器人的语音信号含带噪音,便会用AR-MA 模型进行表述,因此实时性系统频率H(z)的定义如式(2)所示:
其中,A(z)表示滤波器系数,系数的大小由实际运算情况而定。
当智能机器人发出语音信号时,声波频率会发生谐振作用,语音信号调制函数计算公式如(3)所示:
其中,V(z)表示得到的语音信号调制函数;B表示信号声波频率;C表示谐振函数常量。通过以上公式建立智能机器人语音信号特征参数的数学模型,计算智能机器人语音信号的特征参数[8-9]。
2 语音信号特征参数处理
为了确保提取效果,文中在30 Hz 频率下进行采样,从而解决外界干扰这一问题。通过VDM 建立分子程序化模型,将采样数据进行分析[10-12]。在对智能机器人语音信号的采样中,通常为三个不连续的信号为一组,因为在采样过程中,会产生不稳定的振幅,导致智能机器人的语音信号变得离散化,因此不能采样到连续的语音信号,通过离散化的语音信号防止语音信号失真。在对语音信号进行预处理前,文中对智能机器人的语音通道进行采样和量化。采样的点数也会随着采样频率的增加而变得密集,当采样频率降低时,采样点数便变得稀疏散乱,离散信号与原始信号混淆在一起,发生混乱,因此文中在30 Hz 的采样频率下工作,有效防止语音信号出现混乱重叠现象[13]。
特征参数处理过程如图1 所示。

图1 特征参数处理过程
根据图1 可知,语音信号不具备稳定性,因此在识别过程中,经过三次处理,确保处理信号的准确性。在分析智能机器人语音信号时,不稳定性会带来很大的困难,文中采用VDM 技术建立一个分子可视化程序,将不稳定的语音信号拆散开来进行分析处理。
当语音信号处在一定的限制范围内时,智能机器人的语音信号特征参数便不会发生太大的物理量的变化,因此当使用VDM 分子可视化程序将语音信号拆散时,就会给特征提取带来很大的便利。通过利用平稳随机的理论对智能机器人的语音信号进行分析,分帧处理语音信号。将在一个时间段的语音信号进行离散化处理,通过使用连续分帧、交叉重叠分帧等方法,对语音信号进行加窗处理,以此得到处理后的数据,进行提取[14]。
3 语音信号特征参数提取
在经过VMD 分子可视化程序将语音信号处理完后,去除对于语音信号识别无关的杂质信息,获得关键识别语音信号的重点信息数据。从关键信息获取更多的信号特征参数,对数据进行信息压缩,由于智能机器人的语音信号会发生动态变化,因此对于语音信号特征参数的提取必须在一小部分语音信号上进行,称为短时效提取,这一小部分语音信号称为平稳信号区间[15-16]。基于VMD 的智能机器人语音信号特征参数提取如图2 所示。
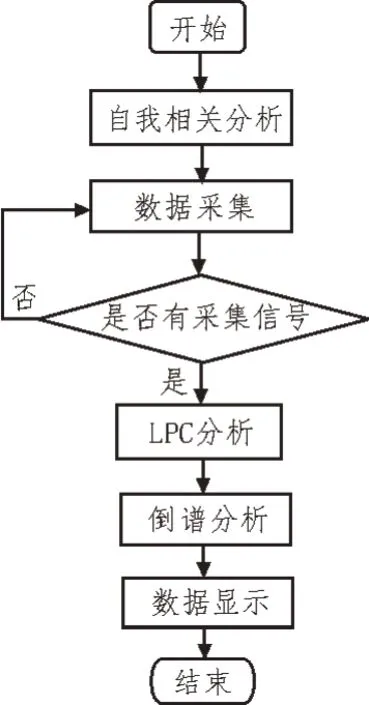
图2 基于VMD的智能机器人语音信号特征参数提取流程
根据图2 可知,文中提出的基于VMD 的智能机器人语音信号特征参数的提取方式主要由三步组成,分别为自我相关分析、LPC 分析以及倒谱分析。抽取的语音信号特征参数数据在VDM 分子可视化程序进行处理后,抽取语音信号特征参数样本进行自我相关分析,利用线性预测倒谱系数对数据确定,是对加窗语音信号频谱的极点模型的近似模型系数[17-18]。文中采用了舒尔递推的方式进行求解,在递推的过程中,所有所求量都小于1,因此非常适用于语音信号特征参数的提取推算。具体公式如下:
根据式(4)设置自我相关方程作一变换,定义变量为Qm;r为归一化系数常数,i为线性预测倒谱系数。同时根据Qm的性质以及正相关定理证明语音信号特征系数Km与Qm的关系为:
在求出系数后,根据倒谱原理求得倒谱特征系数,倒谱特征系数是一种高效的语音信号度量标准,经过VMD 分子可视化进行提取,得到了智能机器人的语音信号特征参数。通过以上步骤完成对智能机器人语音信号特征参数的提取。
4 实验研究
为了验证文中提出的基于VMD 的智能机器人语音信号特征参数提取方法的实际应用效果,设定如下实验。
由于在特征参数提取过程中,很容易受到外界的冲击,因此应用文中提出的基于VMD 的智能机器人语音信号特征参数提取方法对信号进行处理,通过对语音信号进行加帧处理,确保数据提取效果,处理过程如图3 所示。

图3 加帧处理
根据图3 可知,加帧处理出现在第一帧和第二帧中间的位置,加帧处理后,得到的实验结果如图4所示。

图4 加帧处理实验结果
根据图4 可知,加帧处理能够很好地完成数据处理,通过文中提出的方法进行加窗处理,确保通过理想数据窗抵消外界的冲击响应,从而保证提取效果。
特征参数提取时间实验结果如表1 所示。

表1 特征参数提取时间实验结果
根据表1 可知,为了保证实验的准确性,进行了10 次实验,并与文献[3]方法和文献[4]方法进行实验对比。对比结果表明,文中设计的提取方法具有很强的提取能力,能够在短时间内提取出特征参数。对于智能机器人语音信号的提取,必须满足三个要求:提取的语音信号特征参数数据真实有效,能够代表智能机器人的语音特征、提取的语音信号特征具有明显的区分性、语音信号参数之间具有独立性,计算方便。基于VMD 分子可视化程序所用的智能机器人语音信号特征参数主要有两种系数:倒谱系数以及线性预测系数。这两种系数主要为了模仿智能机器人的发声装置,不考虑智能机器人的听觉系统,对于语音信号有较好的识别能力,计算量小、易于实现。
提取准确率实验结果如图5 所示。

图5 提取准确率实验结果
根据图5 可知,在最初提取过程中,文中提取方法和文献[3]方法、文献[4]方法都存在提取准确率较低的问题,但是随着提取时间的增加,文中提取方法提取能力显著增加,在短时间内,文中设计的提取方法就能够完成数据提取。
综上所述,文中通过建立智能机器人语音信号数学模型来计算智能机器人语音信号的特征参数,再通过VMD 建立分子可视化程序,对智能机器人语音信号的特征参数进行处理,并结合自我相关模块、LPC 模块以及倒谱系数,对智能机器人的语音信号特征参数进行提取,解决了文献[3]方法和文献[4]方法中误差率大、提取速度慢、提取参数不精确等问题。
5 结束语
智能机器人语音信号特征参数的提取一直是智能机器人领域和语音信号领域的重点问题,现有方法都有着各种缺陷,例如误差率高、提取速度慢、提取的参数不准确等。文中提出的基于VMD 的智能机器人语音信号特征参数提取方法可以有效提高检测准确率,缩短特征参数提取时间,并为后续对于智能机器人领域以及语音信号领域的研究提供参考。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
云南化工(2021年8期)2021-12-21
中国特种设备安全(2021年5期)2021-11-06
装备制造技术(2021年4期)2021-08-05
海洋信息技术与应用(2020年1期)2020-06-11
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
传媒评论(2019年4期)2019-07-13
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26