随机加权渐消UKF 在导向钻井姿态测量中的应用
2023-11-19 08:06:24毛艳慧高朝晖
中国惯性技术学报 2023年10期
高 怡,李 飞,毛艳慧,高朝晖
(1.西安石油大学陕西省油气井测控技术重点实验室,西安 710065;2.西安石油大学 电子工程学院,西安 710065)
随着石油工业的飞速发展和油气勘探开发难度不断增大[1],亟需提高钻井效率。旋转导向钻井系统是提高钻井效率的核心技术,而实现实时精确测量井下姿态参数又是导向钻井工具的关键问题。在钻进过程中,由于钻头高速旋转并切削岩石产生强振动和冲击,导致钻具姿态测量参数不准确,限制了实时导向钻井技术的进一步发展[2,3]。
无迹卡尔曼滤波(Unscented Kalman Filter,UKF)是 Juliter 等根据无迹变换(Unscented Transformation,UT)提出的一种非线性滤波算法[4,5]。通过UT 采样,选取一定数量与系统状态分布具有相同样本均值和协方差的Sigma 采样点,经过非线性变换后逼近系统的后验均值和协方差。在更新过程中,采样点随着系统的状态方程传播,并根据量测方程不断变换,以保证状态估计的精度。相较于扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法,UKF 具有计算简单、精度高、收敛性好等优点,广泛应用于非线性系统的滤波计算中。然而,该算法要求精确已知系统噪声的先验统计特性,当系统噪声的先验统计未知或不准确,导致UKF 的滤波精度明显下降甚至发散[6,7]。因此,专家学者们在研究UKF 的基础上,提出一系列改进的UKF 算法。
为了解决近钻头钻具动态姿态测量精度的问题,杨全进等提出了一种改进的UKF 算法滤除姿态传感器中的干扰噪声,提高姿态测量的准确性[8],然而该算法限制条件较多,且仅对钻具轴向的振动信号进行了分析。文献[9]研究了具有强烈振动和未知项的旋转导向钻井工具的容错估计,构建新型多项式非线性故障估计器。然而该方法限制性条件过多。文献[10]采用多加速度计配置测量角速度和角加速度,但是,该方法在井下强振动的环境下难以工作。文献[11]提出一种融合单轴陀螺仪和双三轴加速度计测量数据的组合滤波,采用EKF 算法估计出工具面角和陀螺仪漂移,然而EKF 算法由于忽略了高阶项,易导致滤波发散。汪跃龙等[12]采用多传感器最小二乘加权融合方法,利用磁通门和角速率陀螺仪对振动信号不敏感,以及井斜角变化缓慢的特点,通过反解得到对应的加速度信号参考值,再依据最小二乘原理确定权系数,使融合后的系统方差达到最小,该方法计算复杂,且只验证了振动强度的模拟测试。杨海等提出一种基于UKF 与互补滤波的随钻IMU 井斜动态测量方法,提高井斜角整体测量精度,实现了精准随钻测斜[13]。然而,该方法只考虑了井斜角,并未顾及其他姿态参数。文献[14]提出一种衰减记忆平方根UKF的方法,应用到多传感器信息融合的随钻姿态测量技术中,但是,该方法并未考虑井下振动干扰对测量参数的影响。
在上述研究的基础上,以旋转导向钻井工具姿态参数测量为研究对象,以提高导向钻井姿态测量参数的精确度为目的,利用UKF 的特点和随机加权估计的优势,提出一种随机加权渐消UKF 算法(Random Weighting Fading Unscented Kalman Filtering,RWFUKF)。该算法通过Sigma 点获取状态估值和协方差矩阵,采用随机加权因子调整每个窗口的权值,实现动态调整不同时刻残差向量的权值。然后,利用渐消因子实时调节滤波增益,限制滤波器的记忆长度,有效利用最新量测信息对状态更新的影响,对当前量测预测的方差阵进行调整;利用量测数据中的信息对噪声统计特性不断修正,降低滤波误差提高估计精度。将该算法应用于旋转导向钻井姿态测量系统中对姿态参数进行误差估计,经验证,所提算法明显优于EKF 和UKF,可有效提高导向钻井工具姿态的解算精度。
1 随机加权因子
假设k-j(j= 1,2 …M)时刻系统的状态估计值和预测值分别为。令状态预测值的残差向量为 ΔXk-j,则有:
令量测的残差向量为 ΔZk-j,则有:
为进一步获得系统噪声的变化,随机加权因子应满足:
采用协方差匹配判据的方法对滤波发散趋势进行判断,以消除异常量测对滤波解的影响,异常量测通过式(4)进行检测。
若不等式(4)不成立,随机加权因子在满足式(5)的条件下,通过随机加权因子以减小异常量测中的第k-j个残差的权值,从而修正状态预测协方差矩阵,加大当前量测量的作用,抑制滤波发散。因为:
其中,j= 1,2 …M。正则化wj后,可得随机加权因子。
其中,v1,v2…vM服从Dirichlet 分布D(1,1 …1)。
2 随机加权渐消UKF 算法
UKF 是一种以UT 为基础,采用确定性采样的近似线性最小方差估计方法。将随机加权渐消因子引入到UKF 算法的计算过程中,提出一种随机加权渐消UKF(Random Weighted Fading Unscented Kalman Filter,RWFUKF)算法。建立非线性系统的状态方程和量测方程如下。
其中,Wk-1∊Rn和Vk-1∊Rm分别为过程噪声与量测噪声,Xk∊Rn为系统状态变量;Zk∊Rm为量测向量,f(∙)和h(∙)分别为描述过程与量测模型的非线性函数。
过程噪声Wk与量测噪声Vk为不相关的时变高斯白噪声,其统计特性有:
其中,Qk为非负定矩阵,Rk为正定矩阵,δkj为Kronecker-δ函数。
针对式(9)描述的非线性系统,RWFUKF 算法的计算步骤如下:
(1) 初始化,选定滤波初值为:
对k= 1,2,3,…执行下面步骤。
(2) 计算k-1时刻的(2n+1)个Sigma 点
这里ξ,β和α均为常系数。
(4) 发散判断
由式(4)检测异常点并判断是否发散,如发散则通过随机加权因子以减小异常量测中的第k-j个残差的权值,从而修正状态预测协方差矩阵,若不发散则进入下一步。
(5) 量测更新过程
(6) 计算渐消因子
渐消因子[15]决定历史量测信息对系统偏差估计的影响。由于量测噪声统计量随时间积累,引入渐消因子使系统参数随着时间变化时,最新的量测数据能够反应参数变化情况,调整预测与量测值间的权重。根据一步算法,可得渐消因子:
其中,Ak和Bk的迹的比值为先验状态协方差矩阵分别在量测和预测时的比值。
式(16)(17)(19)(20)中的随机加权噪声统计估计值分别为
其中,v1,v2,…,vM为服从Dirichlet 分布D(1,1,…,1)的随机加权因子。
式(18)(23)中的随机加权噪声统计估计值分别为:
从以上计算过程可以看出,RWFUKF 算法通过随机加权因子自适应的调整每个窗口的权值,实现动态调整不同时刻残差向量的权值,抑制滤波发散。利用渐消因子限定历史量测信息的长度,有效地利用最新量测值,实时调整当前量测的预测方差阵,实现滤波修正。
3 实验及分析
3.1 数值计算仿真及分析
旋转导向钻井工具姿态测量系统数学模型见参考文献[2]。实验室的地理条件为北纬34 °1 2′,东经108 °5 5′,地球自转角速度为15 °/ h,地球重力加速度为 9.8 m/s2,磁倾角为52.9 °,磁场强度为52.72μT。设定初始参数为井斜角I=45 °,方位角A=45 °,工具面角TF=45 °,温度Temp=25℃以及转速2π rad/s 旋转状态,搭建室内实验平台对传感器信号进行采集和姿态解算,采样点数为300 个。实验平台选用TX-3S 型测斜仪调校装置、DSP 数据采集处理系统、便携式工控机、虚拟传感器(含三轴加速度计、三轴磁通门和一个角速率陀螺仪)、示波器、试验台、冲击振动台以及上位机等搭建而成,钻具姿态测量系统框图如图1 所示。
钻具的振动信号一般都具有频率高、频带宽、随机性强等特征,且幅值约为6g,最大为30g。在实验室条件下,利用虚拟传感器模拟井下振动干扰环境,模拟加速度振幅峰值为 6g,且频率在30~500 Hz 之间的随机振动信号作为虚拟传感器振动的原始信号,输入到虚拟随钻传感器中。井下振动主要对加速度传感器的信号测量造成干扰,模拟近钻头的随机振动加速度信号如图2 所示。

图2 近钻头随机振动加速度信号Fig.2 Random vibration acceleration signal of near bit
图3 为采用提出的随机加权渐消UKF 算法对三轴加速度计信号Gx、Gy 和Gz 滤波前后得到的曲线,蓝色为原始测量三轴加速度信号,红色为滤波后三轴加速度信号。从滤波前后对比曲线可以看出,振动干扰可以通过RWFUKF 滤波器有效滤除,幅值明显改善,降低了振动干扰对测量信号的影响,能实现准确测量,为姿态解算精度的提升提供了保障。
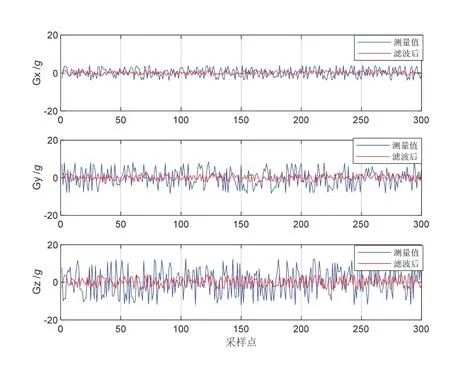
图3 滤波前后的三轴加速度信号Fig.3 Comparison of accelerometer signal along three axes before and after filtering
由于井下振动对磁通门信号影响较小,因此滤波器的滤波效果主要针对由加速度传感器解算得到的井斜角和工具面角进行验证。分别选取全姿态下井斜角和工具面角解算,设定虚拟传感器的输出方位角为45 °。
图4-5 分别为采用UKF 和RWFUKF 得到井斜角和工具面角滤波前后对比曲线,其中,黑色为测量值,蓝色为采用UKF 算法,红色为采用RWFUKF算法。表1 分别给出了测量值、UKF 以及RWUKF算法对应的井斜角和工具面角的均方根误差(Root Mean Square Error,RMSE)对比值。
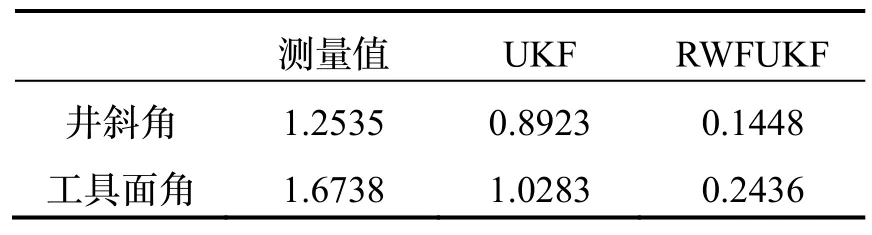
表1 算法RMSE 对比(单位:度)Tab.1 Comparison of RMSE for different approaches(Unit: °)
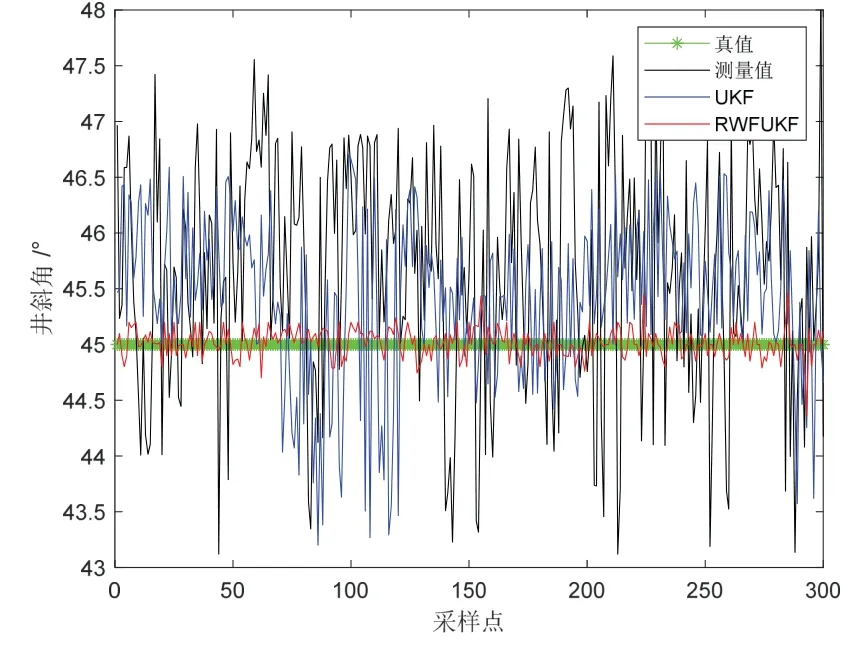
图4 井斜角滤波前后对比曲线Fig.4 Comparison of inclination angles before and after filtering
从图4 中可以看出,加入振动噪声的测量值计算出的井斜角误差大,精度低。采用UKF 算法滤波后的井斜角控制在10 °左右,但是仍有许多采样点的误差较大。而采用提出的RWFUKF 算法滤波后的井斜角控制在6 °左右,精度明显优于UKF,能够滤除量测噪声。图5 给出了工具面角滤波前后对比结果,由于强振动信号的量值计算工具面角得到的结果稳定性较差,误差大。采用UKF 算法滤波后的工具面角略好。而采用RWFUKF 算法滤波后的工具面角曲线光滑,稳定性好,效果明显优于UKF 算法。
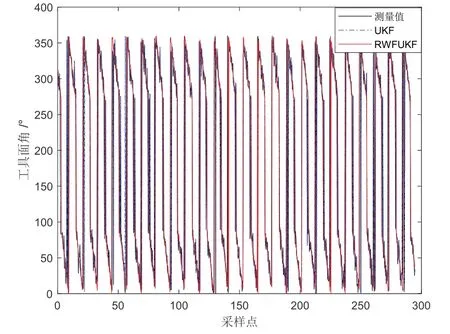
图5 工具面角滤波前后对比曲线Fig.5 Comparison of tool face angles before and after filtering
3.2 实钻井结果分析
实验数据来源于甘肃某井,钻进过程如图6 所示。钻进井段 1104 m~1579 m 的深度,钻压为40 KN,钻速为螺杆+40 r/min,排量为34 L/s,泥浆密度1.34 g/cm3,泵压为18 Mpa,扭矩为300 N·m,井下温度为48 ℃,振动量级为4 grms。要求井斜≤ 3°,单点测斜每钻进30 m 测一点,采用PDC 钻头和螺杆钻具相组合,惯性传感器为三轴加速度计、三轴磁通门和角速率陀螺仪。三轴加速度计量程为±20g,分辨率小于0.01g;三轴磁通门测量磁场范围±0.8 Gauss,分辨率为8 nT;角速率陀螺仪量程为±100 °/s,零偏为±0.2 V。

图6 钻井过程Fig.6 Drilling processing
根据钻井数据,将提出的RWFUKF 算法分别与EKF 和UKF 比较进一步验证和分析,经过解算后得到的井斜角和工具面角解算误差对比结果如图7-8 所示。

图7 EKF、UKF 和RWFUKF 对井斜角的解算误差Fig.7 Comparison of the errors of inclination angle by EKF、UKF and RWFUKF

图8 EKF、UKF 和RWFUKF 对工具面角的解算误差Fig.8 Comparison of the errors of tool face angle by EKF、UKF and RWFUKF
根据图7-8 和表2,由EKF 和UKF 滤波后解算得到的井斜角和工具面角的辨识度较低,由所提的RWFUKF 算法得到的井斜角和工具面角的辨识度高。采用EKF 算法解算得到的井斜角误差控制在[ -1 .70 °,1.70 ° ],工具面角误差控制在[ -4 °,4 ° ],采用 UKF 算法解算得到的井斜角误差控制在[ -0 .90 °,0.90 °],工具面角误差控制在[ -2 °,2 °],采用 RWFUKF 算法得到的井斜角误差则控制在[ -0 .25 °,0.25 °],工具面角误差控制在[ -1 °,1 °] 。结果表明,提出的RWFUKF 算法,滤波效果明显,与实际钻具姿态基本吻合,能够抑制干扰噪声对旋转导向钻井工具动态姿态参数测量的影响。
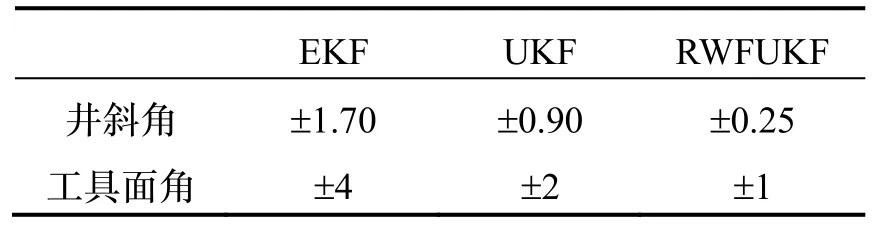
表2 算法对姿态参数的解算误差对比(单位:度)Tab.2 Comparison of the errors of attitude parameters for different approaches(Unit: °)
4 结论
为解决旋转导向钻井工具的姿态参数在钻进过程中易受井下环境的影响,测量传感器输出信号中混杂了大量干扰信号,使得钻具姿态测量参数误差较大等问题,提出一种随机加权渐消UKF 算法,仿真和实钻井结果验证了该算法的有效性。主要结论如下:
1)获得了一种精确测量姿态参数的随机加权渐消UKF 算法,可有效滤除井下干扰及未知因素对钻具姿态参数的影响,井斜角解算误差控制在±0.25 °,工具面角误差控制在±1 °,与传统EKF、UKF 算法相比,井斜角误差和工具面角误差均降低了50%以上,能提高钻具姿态参数的测量精度。
2)利用随机加权因子调整每个窗口的权值,控制模型噪声异常对状态参数估值的影响。
3)采用渐消因子实时调节滤波增益,限制滤波器的记忆长度,能有效利用最新的量测信息对状态更新的影响,对当前量测预测的方差阵进行调整。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26 14:05:02
云南化工(2021年10期)2021-12-21 07:33:32
广东教育·高中(2021年11期)2021-12-01 11:58:56
云南化工(2020年11期)2021-01-14 00:51:02
河北理科教学研究(2020年2期)2020-09-11 06:15:56
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
数学学习与研究(2016年1期)2016-07-04 14:54:19
试题与研究·教学论坛(2016年16期)2016-07-02 08:38:22