面向OODA 过程的飞机类目标行为建模方法∗
2023-11-15 06:51郭小威
舰船电子工程 2023年8期
郭小威 于 畅
(92941部队 葫芦岛 125001)
1 引言
作战仿真已成为新型武器装备试验的重要手段,为体现参试兵力的对抗性,逼真的作战对手不可或缺。当前,在舰空导弹武器系统试验任务中,飞机类目标模拟方面尚无完备的作战对手模型支撑,大多是通过简单的运动公式推算或外测数据回放模拟点目标,没有反映强敌飞机类目标的作战行为特征,攻防对抗过程不明显。为此,建设具备行为决策能力的飞机类目标仿真实体十分必要[1~5]。
在描述飞机作战过程方面,美国空军军官John Boyd 在总结飞行经验和空战数据的基础上,抽象提出了OODA(Observe,Orient,Decide,Act)环理论,为优化作战流程提供了模块化、流程化分析手段,并随着装备智能化水平的不断提升,逐步应用于攻防对抗机理分析中。本文根据舰空导弹作战仿真试验需求,通过研究分析典型作战对手飞机类目标的装备性能、作战思想和战术原则等,面向OODA 过程构造作战实体CGF(计算机生成兵力)行为数学模型,实现任务规划、通信探测、推理决策和规避对抗等行为能力模拟[6~10],为舰空导弹作战仿真试验构建包含目标战术行动的复杂多变战场态势,有效考核其作战能力。
2 舰机对抗过程分析
舰机对抗是现代海空战中的典型博弈对抗场景。一般而言,作为防御方的红方舰艇,以保存自我为基本作战需求,实现对敌方飞机类目标的探测、跟踪与杀伤;作为进攻方的蓝方飞机,追求达成隐蔽接敌、执行打击与安全退出的作战目的。双方在对抗过程接续体现高强度的探测与突防、跟踪与干扰、拦截与规避等行为对抗要素。
1)舰艇防空作战装备及流程
舰艇防空作战装备一般包括舰载探测制导雷达、武器控制系统、中远程舰空导弹和信息支援系统等组成,顺次完成对空搜索、目标探测、识别跟踪、武器发射、制导、目标毁伤等,舰艇防空作战详细OODA环路这里不再赘述。
2)飞机反舰作战装备及流程
蓝方飞机类目标反舰作战装备一般包括雷达、导弹、告警器、干扰弹等,攻击过程中一般会有己方预警机、侦察飞机的信息支援,依次完成任务领受、信息支援、航线规划、反舰武器发射、规避探测跟踪、躲避舰空导弹拦截等行为,其反舰作战OODA过程后文中会详细介绍。
3)舰机对抗过程
结合攻防过程和双方主要装备运用,分析对抗关系如图1所示。
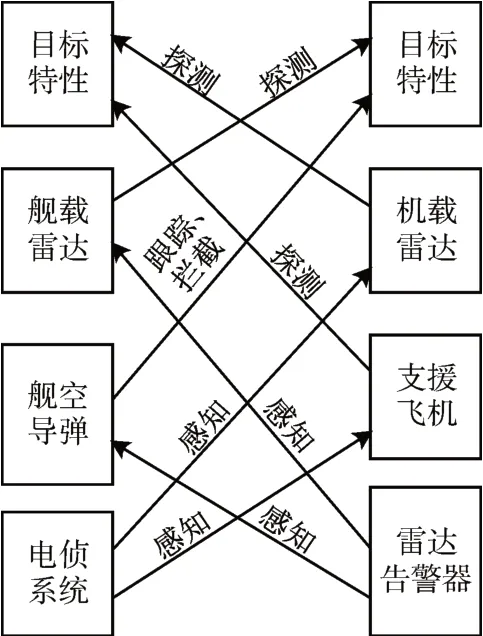
图1 舰机装备对抗关系
3 飞机类目标建模
3.1 OODA过程
Observe 为目标与威胁探测过程。该环节中,飞机类目标主要包含三类行为:一是探测敌方舰艇目标,主要通过机载主动雷达探测;二是探测敌方拦截导弹,主要通过己方预警机、告警雷达探测;三是通过机载数据链获取友机、支援飞机等推送的战场态势。
Orient 为信息融合过程。主要将探测到的信息传输到综合信息系统中,融合后传输给飞机CGF,通过现有的战场信息(敌方目标信息、来袭导弹信息、飞机信息等)不断更新,对任务执行需求和敌方防空系统威胁程度做出判断,为下步决策提供依据。
Decision 为行为决策过程。主要由飞机CGF根据现有的战场信息,遍历行为模型库中的各种预设方案,筛选出前进机动、返航回避、释放干扰等动作方案。最后根据整体战术思路(攻击目标优先级、飞机安全优先级等),找到最适合处理当前态势的行动方案。
Act为行为执行及反馈过程。根据已选择的行动方案进行仿真模拟,并根据执行的结果(被跟踪、成功规避探测、成功规避导弹锁定、成功干扰拦截导弹、成功击中敌方目标等)反馈给飞机CGF,并进入下一个OODA循环过程。
3.2 行为规则库
1)规则库
按阶段划分飞机类目标的行为规则库,描述如下:
(1)无威胁飞行接敌阶段:一般选用合适航线,以经济飞行速度接近目标区域,过程中接收己方预警机等支援兵力的信息引导和态势推送;
(2)有威胁飞行接敌阶段1:在接近敌舰载方雷达探测区域时,视情选用低空/超低空飞行、岛礁/地形掩护、己方干扰机电磁压制支援等手段,选择合理的航路规划,突入敌方防空区域;
(3)有威胁飞行接敌阶段2:在接近敌方舰空导弹拦截区时,参照上一阶段执行,另需通过机载雷达、告警系统、支援兵力等链路时刻掌握敌方舰空导弹发射状态,威胁程度较高时则放弃任务返航等;
(4)中距防区突防阶段:接近敌方反舰导弹发射区域时,需要改变低空/超低空突防状态,拉升飞行高度达到反舰导弹发射条件,此时极有可能被敌方雷达锁定,需要以告警系统提示信息开展行为决策;
(5)舰空雷达锁定阶段:告警系统给出初期预警信息时,飞机根据战场态势开展机动规避行为决策;
(6)舰空导弹发射后:探测到敌方舰空导弹发射后,根据探测到的或预警机推送的威胁态势,开展机动规避行为决策;
(7)末制导导引头锁定后:机载告警系统给出被锁定威胁信息后,根据敌方舰空导弹来袭方位等信息,开展机动规避行为决策。
2)知识库
主要包括战场环境信息和先验敌情信息,描述如下:
(1)气象环境信息方面:温度、风向/风速、云雨等影响飞机机动行为的气象环境要素;
(2)地形/海情方面:航路沿途的岛礁分布、高度、大小,以及海况等级等影响低空飞行和机动的要素;
(3)敌方雷达性能参数:雷达探测远界、扫描周期、能量/功率、角度等与机载告警系统交互耦合的要素;
(4)中远程舰空导弹性能参数:拦截远界、制导方式、机动过载等要素;
(5)攻防对抗态势信息:敌方舰船运动信息、己方电磁压制态势信息等。
3.3 目标机动模型
以六自由度运动学模型表示飞机类目标机动模型,在轨迹水平坐标系(h系)下描述基本机动动作实现过程,并可根据需要转换为大地系和机体系下的状态信息。战术机动动作则是基本机动动作的复合[11~12],其中,匀速/匀加(减)速运动,实现较为简单,下面重点说明爬升/俯冲与转弯动作的操作过程。
1)爬升与俯冲
爬升过程与俯冲过程互为逆过程,故仅对爬升过程的轨迹方程进行描述。飞机的爬升分为进入段、直线段和改出段,其中T为爬升或俯冲总时间。
(1)进入段
轨迹方程设计如下:
式中,V0为爬升前的平飞速度,T为爬升总时间。
此时俯仰角表示为
(2)直线段
在该阶段,飞机以恒定的俯仰角爬升到需要的高度,机体角速率ωbx=0。则有
(3)改出段
改出段轨迹方程中铅锤方向目标加速度与进入段轨迹方程方向相反,即
此时俯仰角表示为
2)飞机转弯
设飞机为协调转弯,转弯过程无侧滑,飞行轨迹在水平面内。设转弯过程中飞机速度为,转弯半径为R,转弯角速度为,转弯所需向心力由重力倾斜产生的水平分量来提供,其加速度为。则有:
飞机的转弯分为三段:由平飞改变滚转角γ进入转弯段、保持滚转角以等角速度转弯段和转完后的改平段。设转弯开始时,倾斜角变换线性增加,角速率ωhz近似认为是线性增加,结束时,γ和ωhz线性减少。
(1)进入转弯段
飞机在该段以等角速度将滚转角调整到所需的值,其与飞机性能相关,这里设定此阶段过渡时间为2s,滚转角度为π/6,转弯总时间为T,计算公式如下:
(2)等角速度转弯段
式中,ψ=ω∙(t-1)。
(3)改平段
式中,ψ=ω∙(t-1)-
在转弯阶段,飞机产生的机体加速度和机体角速度分别为
3.4 行为决策模型
主要是在战术机动模型库基础上,选择下一阶段机动行为集合,通过改变飞行控制参数,最大可能的不被雷达跟踪和不被舰空导弹攻击。战术机动模型主要是根据基础机动模型库和3.3节运动学建模方法,实现飞机类目标在不同感知态势下的一系列战术行为,体现的是“飞行员”应该决策执行的对抗行为。在机动模型库基础上可组合成多类战术机动动作,要求方位、速度、加速度、高度、爬升率、转弯半径、转弯角度等限制参数在一定范围内随机,主要包括:1)定常平飞;2)大加速度平飞;3)大减速度平飞;4)大载荷爬升;5)大载荷俯冲;6)大载荷左转;7)大载荷右转;8)左转爬升;9)左转俯冲;10)右转爬升;11)右转俯冲;12)盘旋(近似圆周机动);13)S形/蛇形机动(部分圆周机动组合)。
在行为选择逻辑控制下生成连续的机动行为集合,不停地在直线飞行、加速/减速、爬升/俯冲、转弯、改平等状态下变换,做到真实模拟战术机动行为。本文选择基于有限状态机(Finite State Machine,FSM)的CGF 行为决策模型实现选择逻辑控制,根据对抗态势和当前飞行状态信息,用于确定可执行的下一步战术机动动作集合,简要表述如下:
给定一组状态集S和输入集X的前提下,一旦输入x(t)和状态s(t)确定,在映射和的作用下可确定有限状态机的下一状态x(t+1)和输出y(t)。在CGF行为决策模型中,有限状态机用于描述CGF行为的状态变化,通过不同的态势输入,经过有限步的状态转移计算,获得其输出。
定义飞机类目标有限状态机模型为一个四元组G:
式中,S为状态空间的非空有限集,X为输入空间的非空有限集,Y为输出空间的有限集,f为状态转移函数。
从时序理解转移函数f为:在第k次状态转移阶段,当前状态s(k-1)∊S,输入x(k)∊X,则系统转移为下一个状态s(k)并产生输出y(k),即:
并有s(0)为系统初始状态。
其中,f状态转移函数为程序设定的逻辑程序,但需要考虑优先权问题。优先权评估方面,下一步机动战术动作优先权高的节点被执行概率,大于优先权低的节点。多个行为可供决策选择时,第i个节点被选择执行的概率pi正比于它的优先权,即:
式中,wi代表第i个行为的优先权,k为一调整正实数。
3.5 CGF模型
飞机类目标模型设计在仿真系统中以CGF 形式实现,是指通过计算机在一个虚拟战场环境中生成一系列仿真实体,可对其进行控制,也可自主地对虚拟战场环境中的事件和状态做出相应的合理反应。该模型主要由三部分组成:感知器、控制器和执行器。感知器负责对虚拟战场环境中地形、气候、敌情等各元素的感知,完成对战场信息的收集和分析过程,感知结果将对仿真实体的决策产生影响。控制器一般包括学习、决策、规划等几个要素,是行为模型的核心;决策是从相互冲突的一组行动中选择一个执行;规划是在现有的信息基础上,完成一系列行动方案制定。执行器用来模拟实体执行的动作。
基于OODA过程建立CGF行为模型框架,如图2 所示。框架中感知器部分,由飞机上的雷达模型、数据链模型、告警器模型等通过探测/接收实现;控制器作为核心,包含了飞机模型实体的信息状态、执行的战术行为库以及实现决策的作战逻辑规则库等;执行器完成战术行为在运动学模型的解算,作为仿真推进的结果反馈到战场信息中。
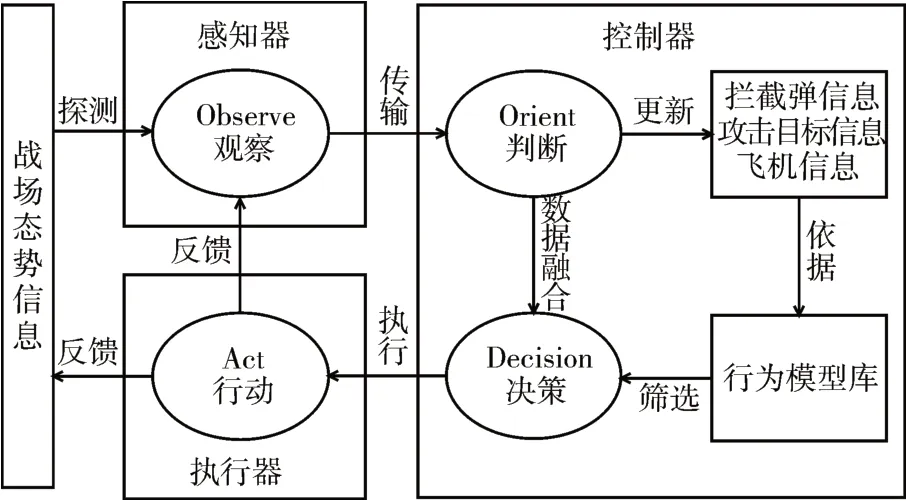
图2 CGF行为模型框架
这里将典型飞机类目标CGF 的3 类装备模块,划分为通信探测、推理决策、指令解析、执行机构和飞行状态5 个仿真功能模块具体实现,如图3 所示。各模块主要功能及交互信息见表1。
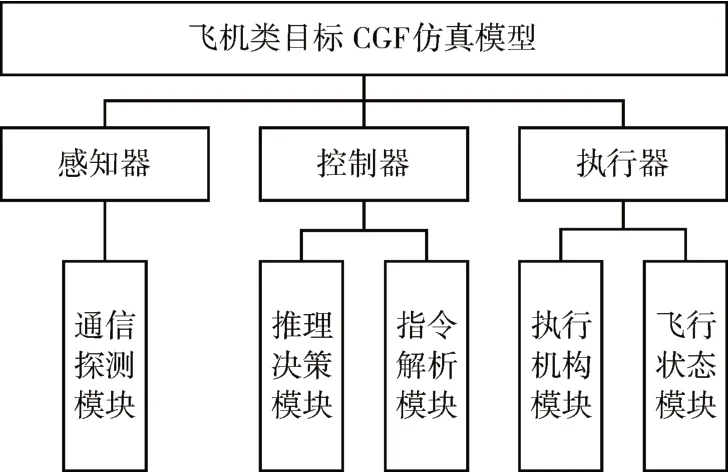
图3 功能模块组成
4 实例验证
在某仿真试验平台基础上,开发仿真代理、通信组件、飞机类CGF 状态监控等辅助工具,构建舰空导弹拦截飞机类目标仿真验证系统。以蓝方舰载机攻击红方驱逐舰为作战场景,检验验证飞机类目标行为模型执行状态,以及对红方拦截效果的影响,红蓝方主要装备结构如图4和图5所示。

图4 红方舰空导弹武器系统仿真模型结构

图5 蓝方舰载机仿真模型结构
主要根据3.5 节各功能模块输入输出信息内容,定义红方、蓝方以及仿真试验平台之间的信息交互关系,如图6所示。

图6 仿真验证系统主要信息交互关系
验证想定描述如下:
1)作战背景:某作战海域,蓝军意图运用舰载机通过空袭形式攻击红方巡航值班舰艇,红方判明敌方意图后开展防御作战,重点运用舰空导弹防空作战。
2)红方作战意图:在蓝方舰载机可能攻击的方位上进行侦察探测与拦截,运用舰载雷达远程探测优势和中远程舰空导弹远程拦截优势,阻敌前突,将其拒止在可发射对海打击武器发射区域外。
3)蓝方作战意图:运用舰载机挂载反舰导弹作为主攻兵力,空中预警机和电子战飞机为保障支援兵力,隐蔽突防,抵达红方舰艇一定范围时发射反舰导弹。进攻过程中,时刻防备红方水面舰艇探测和拦截;在受威胁较大时可放弃进攻任务,以求安全返航,支援兵力提供相应的红方装备作战状态等战场态势信息。
某次攻防对抗实例验证中,蓝方飞行接敌航线设置为低空出航-低空进入-中高空返航模式,当在红方舰载雷达探测范围之外时,基本不受威胁,没有对抗剧烈的行为决策,这里不做详细分析;蓝方飞机进入阶段,舰载机CGF模型不断收到红方雷达开机、锁定、导弹发射、末制导雷达开机告警等战场态势信息推送和感知,据此作出相应行为决策。对抗过程中顺次执行了1000m 平飞-降高至200m-平飞保持-爬升至500m-平飞保持-武器发射-右转向至10°-平飞-降高至200m-平飞-右转向至90°-加速至415m/s-平飞保持20s-减速至300m/s-爬升至3000m-返航等机动动作。在红方探测坐标系下蓝方飞机模型飞行轨迹和速度变化曲线如图7 和图8所示。

图7 蓝方舰载机模型飞行轨迹
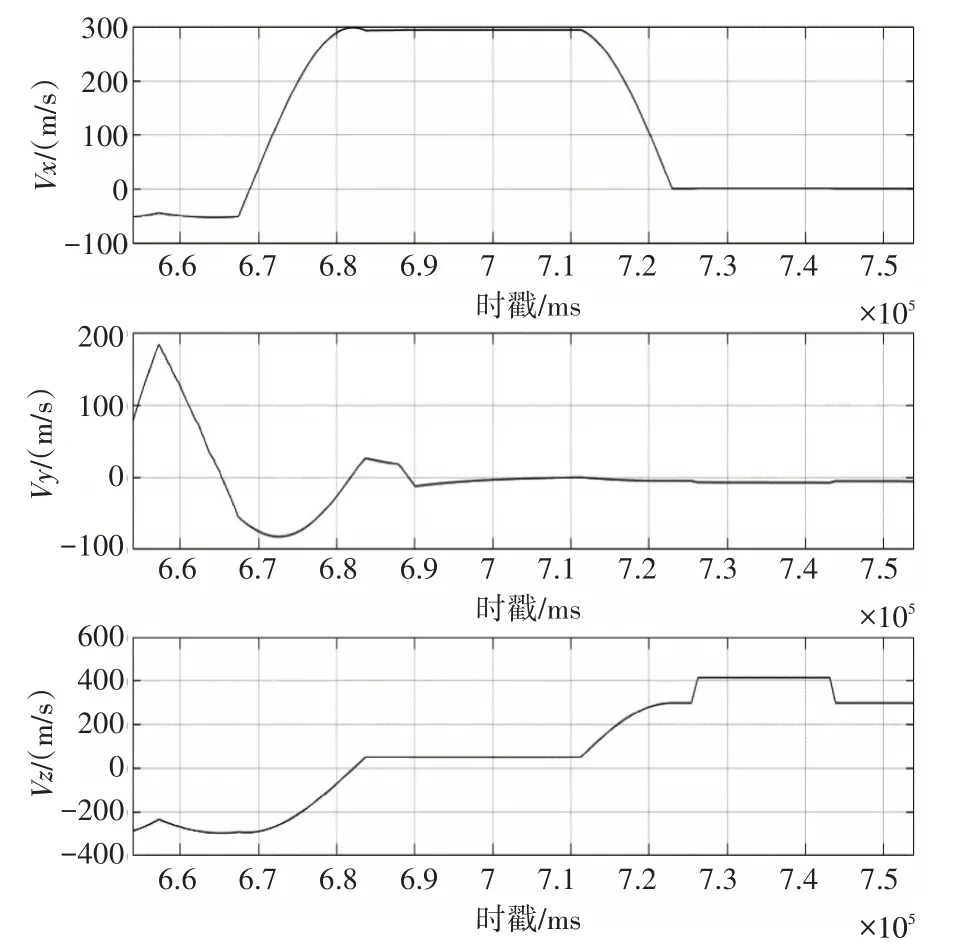
图8 对抗过程速度变化曲线
多次测试验证,以往采用航路规划的蓝方飞机类目标,只要进入红方舰空导弹杀伤区,基本都会被有效拦截;本文研究中具备行为决策能力的飞机类目标,相同攻击任务下,受到拦截时在有效探测信息保障下,执行了多个战术机动动作,大幅影响红方导弹命中结果。
5 结语
本文根据舰空导弹作战仿真试验实际需求,通过分析典型作战对手飞机类目标的装备性能、作战思想和战术原则等,面向OODA 过程构造飞机类目标行为数学模型,实现其任务规划、通信探测、规避对抗和推理决策等行为能力的模拟,模拟了真实攻击作战过程,为舰空导弹作战仿真试验构建复杂多变的战场对抗态势,并进行了实例验证。验证结果表明:飞机类目标行为建模方法有效可行,可支撑装备作战能力评估。下一步将重点考虑多机协同作战模式下行为建模方法,完善体系化作战模型。
猜你喜欢
舰船电子工程(2023年7期)2023-12-04
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
现代防御技术(2016年1期)2016-06-01
棋艺(2014年4期)2014-09-17
棋艺(2014年3期)2014-05-29
现代防御技术(2014年5期)2014-02-28
棋艺(2009年8期)2009-04-29
中国青年(1983年2期)1983-08-21