高超声速导弹攻防对抗及其试验数字化仿真研究∗
2023-11-15 06:50张政超张德欣于卫刚马亚涛
舰船电子工程 2023年8期
张政超 张德欣 于卫刚 马亚涛
(63891部队 洛阳 471000)
1 引言
俄乌战争自2022 年2 月24 日爆发以来,至今还在持续。在这场战争中,俄罗斯航空航天部队至少3 次使用了“匕首”高超声速导弹,对乌克兰的大型军工厂、燃料库、弹药库等高价值目标实施了多次打击,其打击效果令人叹为观止。这是人类历史上首次在实战中使用高超声速导弹,其重要意义不容忽视,如普京总统所言:“它们能够改变世界战争力量格局”。超高声速导弹武器由于其极高的速度和蛇形规避的机动能力,不但能够突破导弹防御系统,还有倍增的武器动能,使得其穿透力、毁伤效能成指数级增加。
正是由于高超声速导弹优越的突防性能和良好的毁伤效果,世界各国对其研究方兴未艾,一方面致力于研制出性能更为先进的高超声速导弹,另一方面,也着力于研制能防御对抗高超声速导弹的措施和导弹防御系统。
2 国内高超声速导弹研究技术现状
高超声速导弹指以高超声速飞行技术为基础、飞行速度超过5 倍音速的导弹。高超声速导弹具有航程远、速度快、结构简单、性能优良等优点,能够准确快速地打击目标,被誉为航空史上继螺旋桨、喷气推进其后的第3 次革命。高超声速导弹主要包括制导炮弹、巡航导弹、钻地导弹等。
在总体技术及目标关键技术等方面,张斌等[1]从气动特性、气动防热、操稳特性、结构性能等构建了高超声速导弹的总体性能指标体系,并在此基础上提出了面对高超声速挑战的指挥信息系统发展架构,包括联合指挥架构、预警探测体系、动态任务规划和拦截防御手段等四个方面。郭玥[2]则从基于结构方程模型(SEM)的方法,构建了反映高超声速飞行器使用能力指标与技术指标关系的结构方程模型,并进行了验证分析。也有学者对雷达探测临近空间高超声速目标关键技术[3]进行了研究,主要从临空高超目标轨道特性、运动特性、电磁散射特性对雷达探测带来的技术挑战出发,分析雷达探测临空高超目标需解决的关键技术问题,提出了在临空高超声速导弹的高速、大机动、等离子鞘套带来的目标检测、跟踪、鞘套目标识别等问题的技术解决路径。
在高超声速飞行器结构技术方面,马征以第六代战斗机、高超声速飞机等航空装备为重点,分析了国外先进飞机在速度性能、续航能力、处理任务方面、隐身性能、生命稳定性、经济成本等典型技术特征,并针对技术特征提出了先进飞机结构技术的发展需求,梳理了先进复合材料结构、变体结构、多功能结构、热防护结构等关键技术的发展现状[4]。
在导航技术方面,文献[5]对比临近空间高超声速导弹的发展历程,梳理了高超声速导弹采用的惯性导航、GNSS、天文导航等技术方案;对各种导航技术运行的特性和局限性进行了探讨,分析了高超声速导弹面向复杂环境进行自主导航应用的难点问题,给出了高超声速导弹自主导航技术的发展方向,即为改善抗干扰性能和保证系统的性能稳定和优越,从而对现有的导航技术进行合理拼接和有效复用。胥涯杰则针对目前惯性导航系统误差补偿模型对静态误差和动态误差处理能力不足的问题,为适应高超声速导弹长航时、高精度的惯性导航要求,提出了一种基于神经网络的加速度拟合模型[6]。陈凯等认为导航坐标系直接受到发射坐标系的限制和影响,但无论是原理还是实际运用的效果,不同的导航坐标系实质上都是对目标时空信息的度量,同时介绍了一种二子样发射系捷联惯导离散化算法,并且分析了发射坐标系导航的特点[7]。
在制导技术方面,主要有协同制导方法的研究[8],鲁棒轨迹优化、变体制导、智能制导研究[9],基于刚体/弹性模型的控制技术[10]。在弹道技术方面,孟夏莹针对临近空间中高超声速导弹的飞行弹道的规划和难以预估等现实问题,对高超声速导弹进行了纵平面运动轨迹建模、气动参数估计及攻角模型设计[11]。刘滔则从运动特性分析、机动目标跟踪和目标轨迹预测三个方面提出应重点加强的研究方向[12]。张君彪等人选取了气动加速度作为预测参数,提出了一种基于集合经验模态分解和注意力长短时记忆网络的HGV轨迹智能预测方法[13]。
3 国外高超声速导弹系统
区别于常规弹道导弹,助推滑翔导弹、空射弹道导弹、吸气巡航导弹构成了目前各国发展的高超声速导弹类武器,由于其具有远射程、高速度以及强机动性的优良特性,所以具有重要的战略意义。国外的高超声速飞行器,特别是导弹武器系统,主要集中在俄罗斯[14~15]、美国[16~18]、韩国、朝鲜、日本[19~21]等国家。
其中,助推滑翔式高超声速导弹主要以弹道导弹或助推火箭作为加速器,其弹头可以在大气层内高速滑翔一段时间,并且这个滑翔过程是可控的,弹道也是可变的。其弹头为乘波体结构高超声速飞行器,但其滑翔弹头是无动力的,或者具有小动力。俄罗斯“先锋”和美国AGM-183A 高超声速导弹都是助推滑翔导弹的典型代表。
3.1 俄罗斯
俄罗斯已成功地研制出“先锋”(陆基)、“匕首”(空基)、“锆石”(海基)高超声速导弹。
“先锋”是超高声速滑翔导弹,其作战目标包括美国导弹发射井、指挥中心等坚固目标,目前已成功完成最少5 次试验,2019 年12 月已装备俄罗斯战略火箭兵部队。其最高速度可达20Ma,试验最大射程6000km,可携带常规或核弹头,核当量150kt。
“匕首”是超高声速空射弹道导弹,2017 年已装备部队,其作战目标包括敌方的陆基、舰载平台等反导系统。其最高速度可达10Ma,试验最大射程2000km,可携带常规或核弹头,核当量10kt~50kt,“匕首”导弹可由米格-31K 载机携带发射,采用较强的助推加速能力实现作战性能的跨越式发展。
“锆石”是超高声速巡航导弹,其在脱离前半段传统的火箭助推的弹道后进入后半段,导弹主体通过超燃冲压发动机获得相对持久的动力,从而实现大幅度提速。这种两阶段的持续动力来源使得“锆石”高超声速巡航导弹“技高一筹”。此外,超燃冲压发动机使用的是吸气式发动机,无需携带氧化剂,因此从体积和重量层面提高了其适装性。“锆石”用于反舰作战,其最高速度可达9Ma,试验最大射程1000km,可携带常规弹头,采用Decilin-M 高能燃料,增加导弹射程,并研制出一种新型金属合金,能承受高超声速飞行产生的高温。
俄罗斯研制的典型高超声速导弹如图1~图4所示。

图1 “先锋”高超声速导弹试射

图2 米格-31K机载Kh-47M2“匕首”高超声速导弹
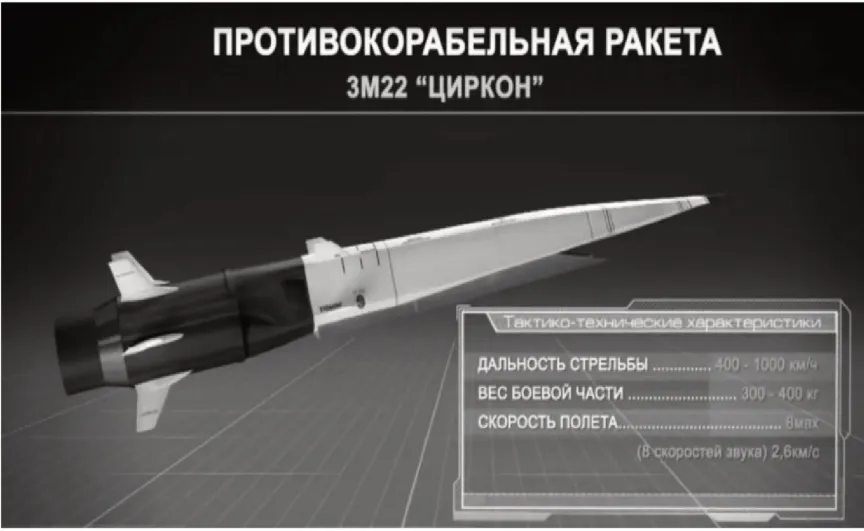
图3 3M22“锆石”高超声速巡航导弹

图4 “锆石”巡航导弹试射场景
3.2 美国
美国目前正要研究或开发的高超声速武器主要有8 种。5 种助推滑翔式导弹和3 种吸气式巡航导弹,其主要特性如表1所示。

表1 美国高超声速导弹一览表
美国研制的典型高超声速导弹如图5~图10所示。

图5 可多平台发射的CPS

图6 AGM-183A 高超声速导弹

图7 陆基发射的LRHW
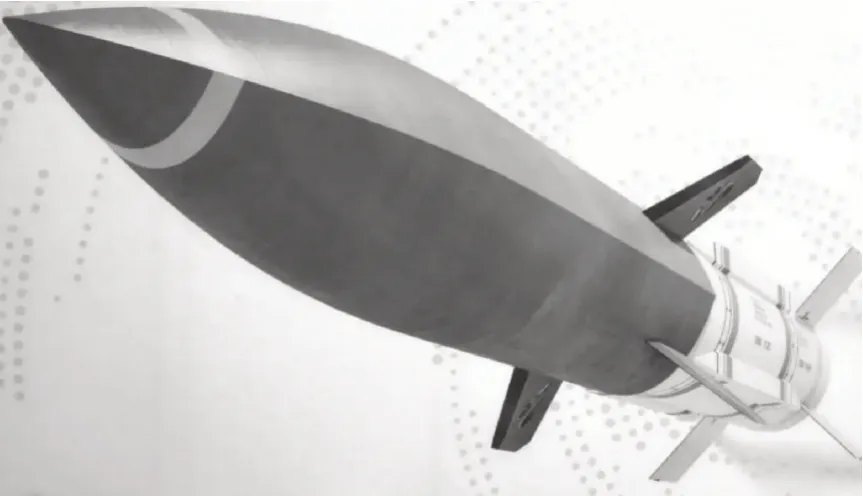
图8 高超声速吸气式巡航导弹HAWC

图9 高超声速吸气式巡航导弹TBG

图10 陆基车载型OpFires
3.3 韩国
2021年9月,韩国国防发展局和韩华集团公布“Hycore”陆基高超声速巡航导弹原型,该项目计划于2022 年开展原型机试飞,2024 年完成预研。其概念模型如图11 所示。当高度约19.8km 时,助推器分离后,超燃冲压发动机工作,使其以至少5Ma的速度巡航飞行,最终完成打击任务,最大射程500km~1000km,可执行对地或对海打击任务。
3.4 朝鲜
朝鲜国防科学院分别于2021 年9 月28 日、2022 年1 月5 日、11 日共3 次试射了“火星-8”型高超声速导弹。试射中检验了高超声速飞行战斗部在多次滑翔跳跃飞行和强横向机动相结合下的操纵性和稳定性等性能。该导弹射高60km,最大飞行速度10Ma,射程超过700km。
3.5 日本
2022年8月,日本宇宙航空研究开发机构在鹿儿岛成功试射了一枚装备了超燃冲压的高超声速发动机火箭,完成了技术验证,这款发动机主要用途就是研制速度5Ma~6Ma 以上的高超声速飞行器。这枚“S-520-RD1号”小型火箭在起飞3min30s飞至168km 的高空,释放出了9.15km 的试验装置。然后,该装置以5.5Ma 的速度降落,进行了长约6s 的燃烧试验。日本高超声速反舰巡航导弹模型如图12所示。

图12 日本高超声速反舰巡航导弹模型
4 国外高超声速导弹攻防对抗技术、发展趋势
4.1 高超声速导弹防御
目前针对包括高超声速导弹在内的导弹防御,美国、俄罗斯等国家构建了完整的反导防御体系。但也面临着预警探测困难、难以持续跟踪、拦截难度大的困难[20]。构建多平台预警探测网、构建完善火力拦截网、加强网络化指挥控制技术研究等已成防御高超声武器的着力选项[21]。
美国典型的反导防御系统主要有“宙斯盾”反导系统、“爱国者”反导系统、“THAAD”反导系统等,俄罗斯的反导防御系统主要有第二代莫斯科反导系统(A135)、战役战术导弹防御系统(含国土、陆军和海上等3个防空反导分系统)等[22]。
4.2 高超声速导弹突防
高超声武器具有速度快、机动性强、部署灵活的优势,但也存在红外特性明显、过载约束、探测有限等不足。由于飞行原理的不同,滑翔式飞行的机动性、速度比吸气式飞行略高一筹,但在弹道特性方面则逊于后者[22]。
4.3 高超声速导弹发展趋势
高超声速滑翔飞行器成为高超声速领域优先发展重点[23],优于其轨迹的不可预测性,高超声速飞行器目前正成为各国争先研究的对象;同时,高超声速导弹的通用化、实战化也是各国考虑的重点。
另外,在制导与弹道规划方面,高超声速导弹武器既可根据自身状态选择打击目标,也可预定打击目标。前者不受速度、射程等控制,可增加机动范围和提高突防概率[22]。
多高超飞行器协同与自主决策的策略[24](包括协同信息获取、协同网络通信、协同自主决策、协同自主制导、协同飞行控制等)能够提高信息的准确度、网络传输的健壮性、弹群作战效果和突防概率等。
5 高超声导弹试验数字化仿真
超声速导弹从研制到列装一般都有较长的周期,需经多次试飞打靶后才能定型。为了进一步提高高超声速导弹的试验效率和展示试验效果,对高超声速导弹试验进行了数字化仿真分析,主要包括规划和想定、试验设计和试验过程仿真、试验数据录取与分析评估等。
5.1 高超声速武器试验的规划与想定
与其它装备试验一样,高超速声速导弹武器的试验也需进行规划和想定,主要是根据任务的性质和特点,对任务的相关情况进行界定和约束。主要的规划内容有创建试验任务、团队配置、试验规划和任务发布等规划和管理内容。
5.2 试验设计与试验过程仿真
5.2.1 滑翔式高超声速导弹
按照“5.1 高超声速武器试验的规划与想定”的内容,滑翔式高超声速飞行器的试验设计主要包括被试装备的选择和状态设计、试验飞行区域的划分、电磁环境的构建和分析、电子对抗装备的选取及飞行航线的确定等,一个典型的滑翔式高超声速导弹的飞行仿真效果如图13所示。

图13 滑翔式高超声速导弹飞行效果图
5.2.2 吸气式高超声速导弹
与滑翔式高超声速导弹相类似的是,在其试验设计及仿真过程中,需要考虑其飞行弹道的巡航特性,其飞行效果如图14所示。

图14 吸气式高超声速导弹飞行效果仿真图
5.3 试验数据录取与分析评估
在高超声速导弹试验数字化仿真过程中,除了重点对试验区域的界定和导弹飞行航线的规划外,还要考虑导弹在突防过程中其弹载电子干扰机与导弹防御雷达的电子对抗过程中,录取电子干扰机的功率、雷达的探测数据等。根据录取的数据,及时评估导弹突防效果。
经过数字化的仿真试验,可以在地图上作业并规划飞行轨迹,观察弹载电子信息装备等的工作状态,收集相关数据后分析突防效果,为飞行试验提供参考,节约试验时间。
6 结语
高超声速导弹以其优越的性能(速度快速、机动性强)成为世界各国争先研究的对象,成为高技术条件下打胜的利器。俄罗斯、美国等军事强国花费大量精力开发和研制,并逐步部署用于实战。一方面,高超声速武器发挥了巨大的军事效益,一方面导弹防御系统面临着转型升级的窗口和机遇。通过对高超声武器的技战术研究,可以牵动新型武器的研制和作战理论的丰富创新,为打赢现代化高科技战争打下坚实基础。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2020年3期)2021-01-14
军事文摘(2020年14期)2020-12-17
兵器知识(2019年1期)2019-01-23
小哥白尼(趣味科学)(2018年5期)2018-06-21
小哥白尼(趣味科学)(2018年5期)2018-06-21
小学时代(2017年16期)2017-06-19
军营文化天地(2017年12期)2017-03-01