一种星载多路输出电源控制环路设计
2023-11-14 02:57张呈象阳晓彬刘少鹏陈伟伟
空间电子技术 2023年5期
罗 聃,张呈象,阳晓彬,刘少鹏,陈伟伟
(中国空间技术研究院西安分院,西安 710000)
0 引言
性能优异的电源变换器需要同时兼顾可靠性、电源稳压精度等技术指标,这就需要电源变换器的闭环反馈控制环路具备非常优异的性能。目前,业界对反馈控制环路的研究已经比较充分,但大多数研究为了降低研究难度,都将研究对象简化为单路输出模型进行,无法真实有效地反映多路输出模式下的性能。而在卫星有效载荷系统的实际应用中,大部分用电设备(比如固态放大器[1])都需要工作在多路供电工况下。因此如何保证这类电源在多路输出模式下的供电稳定性和精度,是电源变换器在实际应用中必须解决的问题。文章提出了一种星载多路输出电源控制环路的设计,确定了BUCK+半桥多路输出变换器环路方案,并对该方案进行了建模和闭环参数设计仿真分析。重点开展了多路输出电路环路参数设计、控制反馈环路设计等工作,结果表明,提出的电源控制环路设计非常适用于卫星二次电源系统。
1 星载供电直流-直流变换器拓扑结构
出于可靠性的考虑,卫星有效载荷设备往往采用分布式供电方案,也就是每台设备单独配备一个专用电源。同时,由于卫星一次电源太阳能阵提供的能源有限,所以对供电电源的转换效率要求往往比较苛刻。并且,卫星的多种有效载荷设备往往需要在多路供电电压工况下工作,例如典型的固态放大器一般就需要3路供电电压。
为同时兼顾高效率和多路输出的供电需求,目前,星载固态放大器的100 V母线供电电源变换器大多采用BUCK+半桥式变换拓扑实现[2],文章重点对该拓扑进行了建模和闭环参数设计仿真分析。当卫星母线电压大范围变化导致电源PWM占空比随之调整时,拓扑中的储能电感设置在功率变压器初级BUCK电路的输出端,而变压器输出端则无需再设置储能电感[3]。该方案可有效克服多路输出电源输出端储能电感的设计难点,因此文章提出的星载多路输出电源控制环路也采用BUCK+半桥式变换拓扑实现,以确保电源多路输出的稳定性。
2 BUCK+半桥电源反馈环实现方式
为满足星载功率部件负载的工作特性,为其供电的电源需具有良好的环路动态性能。但同时满足如此多的电源输出,采用卫星一次供电直接提供是不现实的[4],且会导致负载异常,进而导致整星供配电系统故障,造成不可挽回的损失。采用BUCK+半桥多路变换器的两级拓扑设计,能在满足多路输出的使用要求下,可与整星一次电源有效实现隔离,同时选取的开关管相比其他拓扑电路的耐压值可降低一半,且多路输出端只需要很小的滤波电感和电容便能提供非常稳定的输出电压,因此具有明显的优势[5]。
BUCK+半桥的环路控制电路的拓扑结构如图1所示[6]。该电路拓扑结构是一个单环电压控制型的自动调节系统。该调节系统主要包含主电路(BUCK+半桥变换器)和控制电路两大部分,两种电路相互配合共同工作,通过负反馈的方式构成了闭环调节系统[7]。

图1 具有反馈环的BUCK+半桥多路输出变换器
主电路主要分为前级BUCK变换器和后级半桥变换器两大部分。Vin、VoB、Vo1、Vo2、Vo3分别表示电路的输入电压、前级BUCK的输出电压、电路的第一路输出电压、电路的第二路输出电压与第三路输出电压与电路。其中BUCK的输出电压VoB作为半桥的输入电压。后级半桥变换器的占空比为固定的50%,以期望半桥可等效为一个直流变压器[8]。其副边有三路输出,输出整流电路均采用全波整流方式。其中第一路输出电压Vo1为+28 V,其输出功率较大。第二路输出电压Vo2为+7 V,600 mA,第三路输出电压Vo3为+12 V,其负载为控制芯片与驱动电路,输出功率较小,采用RC滤波方式[9]。表1给出了主电路的输入输出性能指标。

表1 BUCK+半桥多路输出变换器主要性能指标
图1中,Vref、Vc、d分别表示调节系统的参考电压信号、控制器的输出电压信号以及PWM比较器的输出信号(占空比)。通常误差放大器、补偿器用一个集成运放与其外围的阻容元件实现,称之为控制器或补偿网络。采样网络使用无隔离型电压采样网络,从图1中可以看到,Rs1和Rs2组成的分压网络即为电压采样网络,控制电路和主电路输出端没有电气隔离,同时Rs2也是补偿网络的一部分,因此这里控制器包含了采样网络和补偿网络两部分。控制电路的基本工作原理即为输出电压Vo3经过电压采样网络分压后与参考电压信号Vref比较,其误差信号通过补偿网络的调节与补偿作用输出控制信号Vc,控制信号输入到PWM比较器,产生占空比信号,通过开关管驱动器驱动开关管的导通或关断。整个系统的调节原理是:在某个瞬间,当输出电压高于额定值时,补偿网络输出的控制信号Vc降低,使PWM比较器产生占空比信号下降,减小主电路从输入电源汲取能量的时间,使得输出电压的平均值维持不变[10]。
在闭环调节系统中,该电路通过反馈半桥副边第三路输出电压Vo3,对前级BUCK变换器的占空比d进行调节,从而控制第三路输出电压稳定。
3 BUCK+半桥多路输出电路反馈环路机理
电路拓扑后级半桥有三路输出。对于每一路输出,可以看到其开关网络均是相同的。如果采用开关网络平均模型法对电路反馈环路建模,只需对从原变换器中分离出来的开关网络单独进行分析,得到开关网络平均变量等效电路。再利用开关网络平均变量等效电路即可直接得到半桥每一路输出的等效电路,以进行动态特性分析。
根据图1电路,可以得到整个BUCK+半桥电路的交流小信号电路模型[11],如图2所示。

图2 BUCK+半桥变换器的交流小信号等效电路
定义BUCK输出滤波器的传递函数He与输入阻抗Zf。
(1)
(2)
(3)
后级半桥有三路输出,对于每一路输出,可以看到其开关网络均是相同的。定义半桥三路输出滤波的输入阻抗Zf1、Zf2与Zf3:
(4)
(5)
(6)
同时定义半桥第三路输出滤波器的传递函数He1(s):
(7)
(8)
考虑漏感后半桥变换器的输入阻抗ZinHBlk(s)如下:
(9)


(10)
Gvd(s)是用于环路动态分析与控制参数设计的关键传递函数[12]。将PWM环节的数学模型GPWM(s)考虑进去,根据建立的主电路小信号模型Gvd(s)与GPWM(s)可以绘制主电路控制对象Gvdm(s)相应的波特图。用于绘制Gvdm(s)波特图的电路参数如表2所列。

表2 BUCK+半桥多路输出变换器电路参数
为了验证电路环路模型理论计算结果的准确性,用仿真软件对BUCK+半桥主电路环路进行仿真扫频测量,仿真电路的参数按表2进行取值,将仿真测量得到开环的频率特性Gvdm(s)与理论结果进行对比,如图3所示。从图3(a)中可以知道,当漏感为0 μH的理想条件下,理论计算结果与仿真扫频结果在fs/2前都是相当吻合的。这说明了电路采用该环路模型的理论可以进行电路特性分析,当考虑漏感Llk=2.5 μH的时候,理论计算结果与仿真结果也是基本吻合的,只是在较高频段之后存在些许差异。这是因为考虑漏感的时候半桥中第3路输出电压Vo3对输入电压VoB的传函GvgHB(s)的计算仍然是按照理想结果下的公式(8)近似计算,这种近似计算方式忽略了漏感引起的占空比丢失对第3路输出电压的影响[13]。从仿真理论对比结果来看,这种近似引起的模型差异非常小。若考虑环路设计的频段在10 kHz以前,则这种近似方式在高频段引起的模型差异不会影响环路设计,仍然可以采用该电路模型理论进行电路特性分析。

图3 主电路Gvdm(s)的仿真结果与理论计算结果
上述仿真分析结果与电路模型分析结果基本证明了所建立的线性平均模型的正确性。但是上述理论分析与仿真分析是在较为理想的电路条件下得到的,而实际工程电路中往往含有许多寄生参数,比如电容ESR,开关器件的导通电阻等,如图4所示。这些寄生参数其中一些会显著影响电路的动态特性并改变电路模型,使理论仿真模型与实际电路模型出现差异。为了消除这些差异,尽量保证仿真准确度,应该在仿真与理论建模中考虑到这些寄生参数的影响。

图4 考虑寄生参数的BUCK+半桥多路输出变换器电路图
实际工程电路中由于寄生参数影响,具有更大阻尼特性[14],在各个谐振频率点没有明显的谐振峰,相位平缓下降,没有剧烈的变化发生。
而仿真与理论计算的结果由于没有考虑到寄生参数的阻尼作用,在各个谐振频率点有较明显的谐振峰和剧烈变化的相位[15]。
如表3所列,寄生参数主要包含开关器件的等效导通电阻与电容的ESR这两大类参数。其中开关器件的等效导通电阻根据电路稳态时流过开关器件的电流与器件Datasheet提供的伏安特性曲线近似计算得到,注意由于开关器件的非线性特性,这些导通电阻的值不是固定不变的,一般随着流过器件的电流(器件两端的电压差)增加而减小。对于电容ESR,根据电容型号对应的Datasheet可以得到其ESR取值范围,不过一般这些Datasheet给出的ESR都是最大值,其值达到几欧姆,所以这里根据不同类型的电容通常ESR值得到这里的各电容ESR值。

表3 BUCK+半桥多路输出变换器的寄生参数
然后,在仿真与建模中考虑了相关寄生参数后,可以让仿真与理论建模的结果非常的接近工程实际电路的实测结果,考虑寄生参数后的BUCK+半桥电路仿真与理论建模如图5所示。

图5 主电路Gvd的实际测量结果与考虑寄生参数的仿真与理论结果
4 电源主要技术指标
本文研制的BUCK+半桥电源的主要技术指标,经测试结果如下:
输出功率:≤168 W
满载效率:≥91%
相位裕度:45°
热真空试验数据如表4所列。
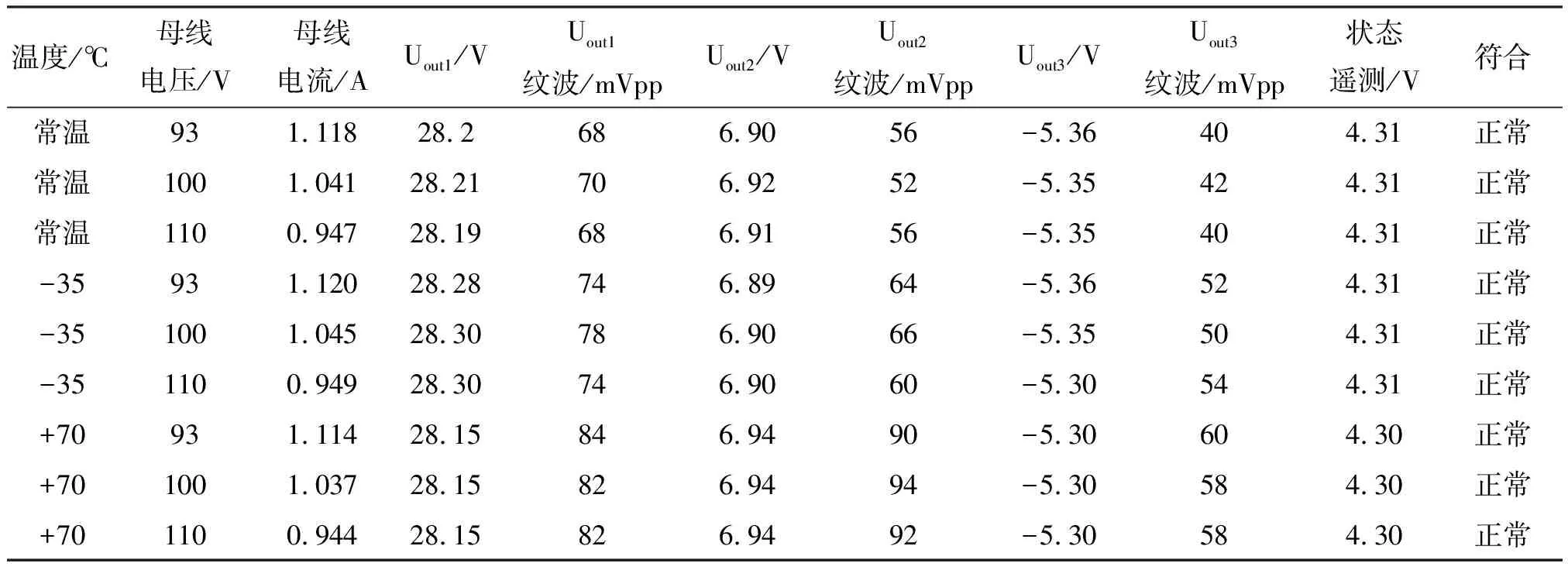
表4 热真空试验数据
产品进行1×10-3Pa热真空试验,温度范围为-35 ℃~+70 ℃,循环次数为3.5个循环,通过拉偏输入电压对母线电流、输出电压、输出电压、母线电流以及相关遥测测试数据判断产品环路稳定。
产品基于UC1825L运放构建的PID控制器与理论PID模型差异太大,所以会使得理论设计的控制器参数失效。这里选择外接运放构建PID控制器,实现电路的闭环调节。UC1825L自身的运放作为跟随器,将外接运放的输出控制信号传递到UC1825L内部的PWM比较器之中。外接运放选择LM124(增益带宽积1MHz)作为误差放大器配置PID补偿网络。
根据建立的主电路控制对象模型设计的一组控制器参数如表5所列,注意其中的极点从设计的23 kHz移动到68 kHz处。

表5 设计的PID控制器零极点参数取值
这里采样网络仍然采用产品的采样网络参数值。则根据其余补偿网络的阻容值并进行选型得到各元件最终的参数如表6所列。

表6 补偿网络无源器件的参数值
根据上述设计流程,设计的一组参数理论补偿效果如图6(a)所示,截止频率约为5.36 kHZ,相位裕度46.76°。在产品上验证的结果如图6(b)所示,截止频率约为4.54 kHz,相位裕度约为43.5°。可以看到理论设计的补偿效果与仿真以及实际得到的补偿效果基本相近。
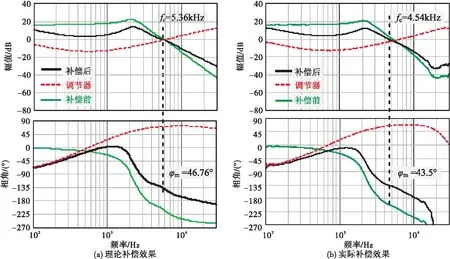
图6 设计控制器的理论补偿效果与实际补偿效果
5 总结
文章对BUCK+半桥多路输出电源的环路建模与优化进行了研究,采用开关网络平均建模法分别建立前级BUCK电路和后级半桥电路的平均开关模型,将理论计算模型与仿真和实验测量模型进行对比,通过分析理论模型与实际模型存在的差异,在理论模型中进一步考虑寄生参数的影响,最终可以建立与电路实际模型基本一致的理论模型。并依据该设计方法对项目电路设计了一组调节器参数使用外接运放作为控制器对参数设计进行验证,最后通过实验验证了控制参数设计的合理性,可以有效降低星载电源系统的不稳定性,更加可靠的适用于星载条件的工作场合。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化·中考版(2019年10期)2019-11-25
阅读(快乐英语高年级)(2019年2期)2019-09-10
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
上海公路(2018年4期)2018-03-21
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28