蛇形机器人的研究进展
2023-11-13 11:47:40商锦萍
机械制造 2023年10期
□ 商锦萍 □ 易 飞
1.武汉生物工程学院 武汉 430415 2.湖北亿纬动力有限公司 湖北荆门 448124
1 蛇形机器人概述
随着时间的推移,现代生物拥有出色的行走、自我调节及环境适应的能力,令许多研究者惊叹。仿生技术的飞速发展,则使许多新型仿真机器人问世。其中,蛇类具有灵巧身形、灵敏的反应速度,成为机械设备制造业仿生的一个新宠。蛇形机器人拥有巨大潜力,有望成为未来的重要发展方向。
科学家们发现,蛇是一种非常活跃的动物,能够在各种复杂的环境中移动。蛇的骨骼结构能够轻松地进行弯曲、摇摆、直线和侧向移动,无论是对于障碍物、泥沙、沙土、墙壁,还是在深水中。蛇形机器人具有出色的多功能性,拥有多种灵活的结构,因此被广泛应用于各个领域,如海洋、陆地、矿山、农林、水产、建筑、交叉作业、消防、救援、抢险救灾等[1]。蛇形机器人的灵活度高,操控范围广,可以穿梭于各种管线之间,完成各种搜索任务,甚至可以帮助人类从灾难现场拯救出幸存者。
随着科学的不断进步,蛇形机器人已经变得越来越先进。笔者介绍蛇形机器人的最新发展,揭示其核心技术。
2 蛇形机器人研究现状
2.1 功能特性
当前新研发的蛇形机器人拥有出色的环境感知能力。采用多种传感器,如压力、视觉、距离、角度、速度,可以实时监测周围环境,并且利用数据融合技术,调节蛇形机器人的运动参数,从而满足不同环境下的需求。以上技术的出现,使蛇形机器人可以更加灵活地应对外部环境,并且可以实现协同运动,甚至满足自主运动的需求[2]。
尽管蛇形机器人可以完美地完成各种任务,但是仍面临着一些棘手的技术难题。第一,因为密封部分经历频繁的拉伸、收缩,以及长时间操作,可能会导致表面的粘合剂受损,从而导致在水中运动时发生内部渗漏,进而影响到控制系统的正常运行。因此,针对容易遭遇外部冲击的接触部位,需要选取合适的结构,并使用高强度材料,同时设置专门针对这类部位的防护装置。第二,在芯片设计过程中,除了将众多传感器纳入其中,还必须采用高效的散热技术,以及配备更加紧凑、高容量的电池,来保证系统的可靠性。
2.2 运动环境
文献[3]设计的蛇形机器人具有出色的模拟生物蛇的特征,但只可以在二维环境,即平坦的水平面中实现正常运动。文献[4]设计的蛇形机器人可以实现准三维环境,即若干规则平面相交组成的地面环境中的运动,但是在三维复杂环境,包括山地、丘陵等凹凸不平的地面环境中的运动能力显得捉襟见肘。因此,需要开发出更加灵活的三维空间操控系统。
随着技术的进步,蛇形机器人的运动环境也在不断变化,从二维平面环境转变为三维复杂环境。在这一情况下,蛇形机器人的理论研究更多地集中在复杂的三维环境中,如山地、丘陵、丛林、草原、戈壁、地震废墟等。因此,未来蛇形机器人的研究应该将重点放在三维复杂环境上,以期获得更好的效果。
3 蛇形机器人常用单元连接结构
生物蛇的身体结构是经过多次竞争、选择及演变而形成的,具有一定的合理性。
文献[4]经过试验研究总结出蜿蜒曲线后,产生了多种满足该曲线的仿生蛇形机器人结构,常用单元连接结构主要有三类[5-6]。
第一,关节间平行方式连接。蛇形机器人的两个关节只能围绕一个平行的轴旋转,关节间以平行方式连接,如图1所示。优点是结构简单,可靠性高,缺点是功能比较单一。
▲图1 关节间平行方式连接
第二,相邻关节间正交连接。蛇形机器人可以通过多个关节的组合实现复杂的三维运动,从而达到翻转的效果,并且相邻关节间的旋转轴是正交的,如图2所示。这一单元连接结构使相邻关节间不仅能够绕着单轴旋转,而且能够实现复杂的生物蛇脊框架。

▲图2 相邻关节间正交连接
第三,单关节内万向节连接。万向节结构是目前广泛应用的蛇形机器人两个单元之间的连接方式。单关节内万向节连接如图3所示,与文献[4]的设计类似,但更像生物蛇,因此更加复杂。

▲图3 单关节内万向节连接
在蛇形机器人的结构设计中,应尽量保持高效性和简洁性,同时也要考虑体积和质量。为了达到上述目标,需合理选择蛇形机器人的各项参数。
在蛇形机器人的结构设计中,除了要求具备良好的刚度和耐腐蚀性外,还应尽可能减小质量,以减小蛇形机器人在运行过程中所需的动力。因此,选择合适的材料显得尤为重要,需要综合考虑机械性能、物理性能、价格等因素。
此外,舵机的选择至关重要,舵机尺寸、功率、扭矩、操纵速度都会直接影响蛇形机器人的性能。所以,为了达到最佳效果,蛇形机器人的舵机必须综合考量质量、速度、空间占比等因素[7-8]。
4 控制系统设计
蛇形机器人的动作较为复杂,因此精准的控制至关重要。为了达到这一目标,需要对每个关节进行精准调整,利用舵机的旋转,实现对各关节的精准操作。蛇形机器人的控制系统由上位机、下位机及相关的调试软件三方面构成。
蛇形机器人的控制系统主要有集中控制和分布式控制两种形式。集中控制简单易行,易于实现,但容易因控制系统局部故障而使整个蛇形机器人系统失去运动能力,可靠性不稳定。分布式控制中,蛇形机器人的运动由多个控制器协同控制,且各为主从关系,所以在分布式控制下,各控制器的工作负荷小,具有较高的实时性和系统可靠性[9-10]。
某蛇形机器人控制系统结构如图4所示。蛇形机器人前端安装的摄像头实时捕获图像,然后通过图像传输模块将图像传输至遥控器中的接收模块,并在屏幕上实时显示画面。无线通信模块接收到信号后,将控制信号传送至主控制器。主控制器再通过串行外设接口总线将相应的控制信号发送给从控制器,从控制器生成相应的脉冲宽度调制信号,操控舵机运转,实现蛇形机器人的前进后退、左右转弯等动作。
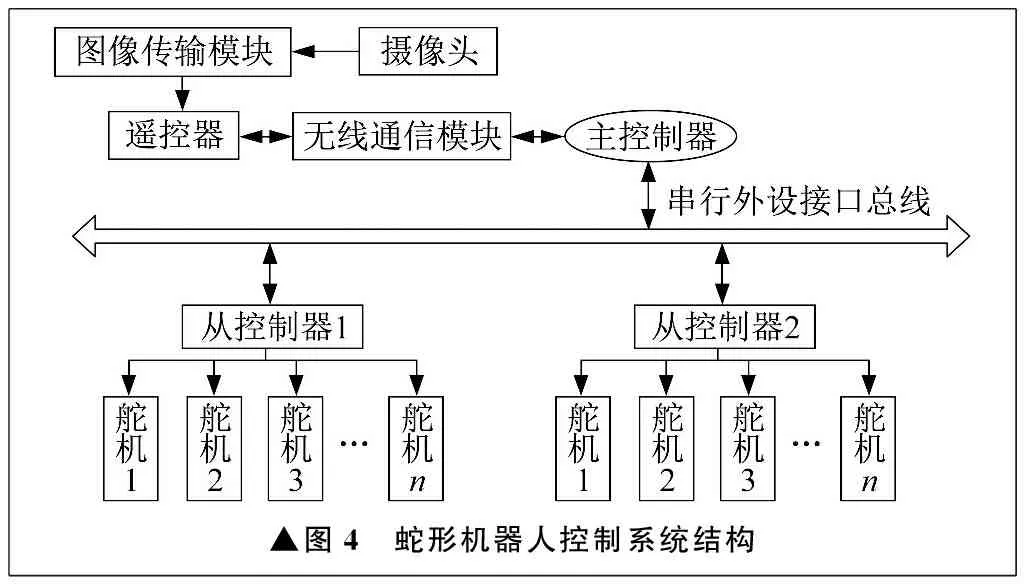
▲图4 蛇形机器人控制系统结构
5 结束语
随着现代科技的飞跃发展,智能机器人已经普遍存在,蛇形机器人因广泛的应用前景倍受关注。然而,目前研发的蛇形机器人仍然存在一些问题,如关节驱动方式过于复杂、爬行速度较慢、三维复杂环境运动能力不足,这些都会降低工作效率,并且控制效果也不尽如人意。随着技术的进步、研究的不断深入,如何提升蛇形机器人的灵活性、能源利用率、精确度,以及更好地适应复杂环境,显得尤为重要,这也是目前技术人员面临的一大挑战。
猜你喜欢
军事文摘(2021年18期)2021-12-02 01:27:58
自动化学报(2019年6期)2019-07-23 01:18:36
中国特种设备安全(2018年10期)2018-12-18 02:17:18
精密制造与自动化(2018年1期)2018-04-12 07:42:48
电子制作(2018年1期)2018-04-04 01:48:14
电站辅机(2017年3期)2018-01-31 01:46:38
金色年华(2017年13期)2017-04-04 02:55:52
制造业自动化(2017年2期)2017-03-20 14:26:08
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:45
汽车实用技术(2015年8期)2015-12-26 09:01:02