
变体飞行器视场约束协同制导方法
2023-11-13 12:35:14黄晓阳
兵器装备工程学报 2023年10期
黄晓阳,赵 斌,周 军
(西北工业大学 精确制导与控制研究所, 西安 710072)
0 引言
随着航空航天技术的发展以及攻防对抗技术的不断升级,现代作战环境日益复杂,精确制导技术正不断向低成本和高性能方向发展,由此衍生出2个技术热点:多弹协同制导技术与巡航导弹变体技术。
现代军事行动中,空中目标具有一定的隐身特性以及机动性,这导致单枚导弹完成任务的难度增加,因此使用多枚普通导弹对目标进行协同围捕作战是一种更为有效的攻击策略。多弹协同制导能够建立信息共享机制,在此基础上实现对目标(群)的配合作战,在提升武器系统探测感知能力、智能化水平、作战效能和效费比方面更具潜力。
作为目前研究的另一热点,变体巡航导弹在不同的飞行环境下和执行不同的飞行任务时可以通过改变外形条件,以获得相适应的气动性能和飞行状态[1]。可变后掠翼巡航导弹能够将机翼置于小后掠角位置,此时导弹过载能力较强,但阻力较大,飞行速度较小;而机翼置于大后掠角位置时,能够在保持一定过载能力下降低其飞行阻力,增加飞行速度,该特性能够较好地平衡飞行过载与飞行速度之间的需求,适用于异构条件下的弹群协同作战场景。将多弹协同制导技术与导弹变体特性相结合,对于实现对高价值飞行器目标(群)的精确拦截[1],降低作战成本、提高作战效能、实现低成本非对称作战具有重要的意义。
弹群的协同制导存在2种可行方式,分别是隐式协同模式与显式协同模式。隐式协同模式下,弹群中每一枚导弹都跟踪既定的约束目标从而实现弹群的协同效果。文献[2]最早考虑弹群的协同问题,并引入了齐射攻击的概念,文献提出的ITCG(impact time control guidance law)方法通过使弹群跟踪相同的终端时间约束以保证弹群同时命中目标,但该方法对剩余时间的估计并非十分准确,因此协同效果有限。文献[3]在文献[2]的基础上增加了对导弹攻击角度的约束,降低了目标的逃逸概率。文献[5]提出了一种非奇异的滑膜制导律对导弹攻击时间进行控制,从而实现弹群的齐射攻击。文献[6-7]解决了对到达时间估计不准确的问题。文献[6]基于纯比例制导律提出了到达时间的解析形式,相比于传统估计方法提高了对剩余时间估计的精度。文献[7]通过构造视线角的多项式函数,避免了对到达时间的估计。文献[8]提出线性二次最优控制律以及基于微分方程的制导律,保证弹群中每一枚导弹都能够按照预设的攻击角度命中目标。文献[9]在文献[8]的基础上,考虑时变的加速度约束,保证在满足加速度约束下实现对机动目标的协同攻击。
相较于隐式协同模式,显式协同模式下的弹群可以利用弹间通讯对协调量的期望值进行实时的调整。文献[10]提出导弹间通讯的方式进行弹群的协同设计,利用相邻导弹节点提供的状态信息并基于多智能体的一致性理论设计了分布式的协同制导律,实现了弹群到达时间的一致性。文献[11]在文献[10]的基础上考虑了攻击角度的约束,在利用弹间通讯保证弹群齐射攻击的同时,每一枚导弹将按照预设的攻击角度命中目标。文献[12]进一步考虑了导弹之间的相互联系,相邻导弹之间保持相对的攻击角度对目标进行围捕攻击。文献[13]基于“领弹-从弹”架构,采用了高阶滑膜控制器并设计了弹群齐射攻击制导律。文献[14]将弹群的三维空间运动模型解耦为侧向平面运动模型和纵向平面运动模型,针对两个平面分别设计协同制导律实现三维空间内弹群的协同制导。文献[15]在文献[14]的基础上增加弹群攻击角度约束,实现了三维场景下弹群对目标攻击角度散布和到达时间的一致,但需要速度可控条件。文献[16]研究了三维空间中弹群通讯过程中存在时滞的情况,给出了在通讯时延下三维空间内弹群齐射攻击的制导律设计方法。文献[17]针对多枚再入式导弹进行了三维空间内的协同制导律方法设计,考虑了速度不受控、大小时变带来的影响。文献[14-17]虽然在一定程度上实现了三维空间内对目标的协同攻击,但没有考虑导弹的视场约束。而在弹群中,若一枚导弹丢失目标,不仅无法保证该导弹完成既定的打击目标,还将会通过弹间通讯影响其余导弹对目标的攻击效果。
现有文献中还没有考虑变体特性的弹群协同制导相关研究。因此本文中提出一种在末制导阶段带有视场约束的变体弹群协同制导方法。该方法采用“领弹-从弹”架构,其中,领弹跟踪恒定的速度前置角指令,而从弹则利用弹群间的数据通讯,实现对多个相对的速度前置角的跟踪,从而使多枚导弹沿不同曲率的轨迹和方向对目标实施攻击。领弹跟踪的速度前置角指令不会发生改变,过载需求较小,但其弹道曲率较大、路程较长,因此需要采用大后掠角飞行,以降低飞行阻力,提高飞行速度实现弹群到达时间一致;从弹需要根据相邻导弹速度前置角信息,实现调整速度前置角指令,需要较大过载实现快速稳定控制,从弹跟踪较小速度前置角飞向目标,弹道较平直,因此更适用于后掠翼置于较小后掠角的情况。
综上所述,本文中所提制导律基于领弹-从弹架构与多智能体一致性理论,适用于由多枚具有变体特性的导弹构成的弹群,能够实现具有变体特性的导弹对运动目标的协同围捕攻击。
1 数学建模
将导弹与目标均视作质点,给出纵向平面内的弹群中第i枚导弹与目标相对运动关系如图1所示。

图1 弹群中第i枚导弹与目标相对运动模型
在图1中,XOY为惯性坐标系;Mi和T分别代表弹群中第i枚导弹和目标(脚标i表示该属性属于弹群中第i枚导弹);aMi和aT表示导弹和目标的加速度,方向分别与导弹和目标的速度vMi和vT方向垂直;ri表示导弹和目标间距离的大小;qi为目标相对于导弹在惯性系下的视线角;θMi和θT分别表示导弹和目标的航迹角;ηMi表示导弹的速度前置角,以此表征导弹视场。
1.1 相关假设
为不失一般性,在进行全捷联弹群协同制导控制一体化建模与协同算法设计过程中引入以下假设:
假设1导弹在末制导阶段无动力飞行,弹群与目标的速度大小保持不变。
假设2假设弹群中所有从弹的速度vMf均相同,假设弹群中所有领弹的速度vMl均相同。
假设3假设弹群间通讯拓扑结构可变,且满足弹群中导弹间可相互通讯。


假设6弹群采用双向通讯,并且弹群通讯拓扑结构总是包含至少一棵有向生成树。
假设6保证了领弹能够有效影响从弹,即在设定通讯拓扑结构下,从弹弹群跟踪指令能够趋向于由通讯拓扑结构与领弹状态决定的稳定状态。
1.2 变体导弹与目标运动建模
弹群设计模型主要由导弹与目标相对运动模型、导弹运动学模型、目标运动学模型3部分构成。
结合文献[20]并结合图1,直接给出惯性系下的导弹与目标相对运动模型:
(1)
导弹运动学方程如下

(2)
式(2)中:(xM,yM)表示导弹在惯性坐标系下的坐标。
目标运动模型建模与导弹运动模型建模方法相同,如下所示

(3)
式(3)中:(xT,yT)表示目标在惯性坐标系下的坐标。
1.3 “领弹-从弹”通讯拓扑结构
假设弹群由N枚导弹构成,其中包括m枚领弹与n枚从弹,第1枚到第m枚导弹为领弹,第m+1枚到第N枚导弹为从弹,用G=(V,ε)表示弹群的通讯拓扑图,其中V={1,2,…,N}表示由导弹作为图节点构成的集合,ε⊆V×V表示导弹之间通讯链路构成的集合。
记A=[aij]∈RN×N,i,j∈[1,N]表示弹群通讯拓扑图的邻接矩阵,若弹群中的第i枚导弹可以收到第j枚导弹的讯息,则aij=1否则aij=0。记B∈RN×N为对角矩阵,其对角线上的元素bi表示弹群中第i枚导弹可以接收到讯息的导弹的数量。最后记L=B-A表示弹群通讯拓扑图的Laplace矩阵,L可以做如下分解

(4)
式(4)中:Ll∈Rm×N,Lf∈Rn×N,可进一步分解为
(5)


图2 弹群通讯结构示意图
1.4 变体弹群被控对象模型
基于2.2节与2.3节所述模型以及假设5,可以直接给出变体弹群的模型,弹群中领弹与从弹的模型如式(6)所示。
(6)
式(6)中:第i枚导弹的加速度aMi与速度vMi满足式(7)所示条件。
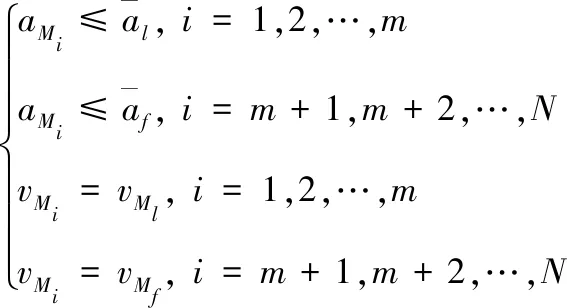
(7)
2 弹群协同制导律设计
2.1 引理及定义
引理1[19]定义积分型障碍Lyapunov函数,
(8)
式(8)中:z=x-xd表示跟踪误差;|x| 若状态满足|x| (9) 函数对时间t的偏导数可以表示如下: (10) 基于式(6)所示弹群中的领弹与从弹模型,给出领弹-从弹制导架构下关于弹群达到一致性协同围捕的定义。 针对1.4节所示模型及定义1,构造弹群的误差变量如下: (11) 弹群的误差变量的导数可表示如下: (12) 基于1.4节所示模型(6)、定义的误差变量(11),直接给出领弹与从弹的控制加速度分别如式(13)与式(14)所示: (13) (14) 其中:e为自然常数;kl为领弹弹群制导律设计参数;kf为从弹弹群的制导律设计参数。 为便于稳定性分析,给出式(13)与式(14)的向量表示: (15) (16) 由式(13)、式(14)可知,所设计制导律在假设3条件下,只需要弹群中每一枚导弹将自身速度前置角ηMi作为通讯变量进行广播,即能够满足制导律要求。 定理1对于1.4节所示领弹-从弹模型,采用式(15)所示控制器,若弹群初始视线角满足|ηMi| 1) 领弹弹群与从弹弹群定义的误差变量最终稳定收敛至有界集合内。 2) 受限状态ηMi,i=1,…,N始终满足视线角约束|ηMi| 3) 在“领弹-从弹”架构下构成了对目标的协同围捕态势。 证明为确保弹群的受限状态满足视线角约束|ηMi| (17) 式(17)所示积分型障碍Lyapunov函数由于其结构简单,适用于对固定指令跟踪时变量受约束的情况。然而,从弹跟踪指令是通过通讯拓扑结构实时计算获得,该值随时间变化,其微分较复杂,式(17)所示积分型障碍Lyapunov函数将不再适用,因此为从弹设计对数型障碍Lyapunov函数如下: (18) 当从弹弹群中导弹i的前置角ηMi逐渐增加并趋向于kc时,Vi趋向于无穷,而当状态ηMi逐渐收敛至稳定状态时,si=0使得Vi=0。上述障碍Lyapunov函数利用对数的形式,在保证函数非负的前提下构成了对速度前置角的限定条件,从而保证了视场受限。 根据式(17)与式(18),综合设计给出弹群的Lyapunov函数如下: (19) 对式(19)求导可得: 将式(12)代入式(20),并利用向量形式简化可得: (21) 将式(15)所示弹群控制加速度代入式(21)可得: (22) 由式(22)可知,所设计Lyapunov函数导数小于等于0,Lyapunov函数将趋向于0,结合Lyapunov含义可知,误差变量最终稳定收敛至有界集合内系统稳定且受限状态ηMi,i=1,…,N始终满足视线角约束|ηMi| 根据假设3,设置5枚导弹组成弹群对运动目标进行协同攻击,弹群中共包含2枚领弹与3枚从弹,通讯拓扑结构如图3所示。弹群制导律控制参数以及弹群初始场景设置见表1与表2。 表1 制导律参数 表2 初始仿真场景参数 图3 弹群间通讯拓扑结构 场景1:At=10sin(πt/4)m/s2,视场角约束为23°,2枚领弹速度前置角的跟踪指令分别为17°与-17°,仿真结果见图4。 图4 场景一弹群飞行状态 场景2:目标方波机动,机动加速度幅值为10 m/s2,角频率π/4,视场角约束为23°,2枚领弹速度前置角的跟踪指令分别为17°与-17°,得到仿真结果见图5。 图5 场景二弹群飞行状态 为避免弹目距离趋向于0时弹群飞行的末段奇异,当弹群中最小弹目距离小于50 m时,弹群采用独立比例导引律进行制导,如式(23)所示。 (23) 式(23)中,导引系数k取为5。 由图4(a)与图5(a)可知,所设计误差变量能够较快的收敛到0点附近;由图4(b)与图5(b)可知,在所设计制导律下从弹加速度在-160~160 m/s2,由图4(c)与图5(c)可知,领弹加速度在-100~100 m/s2,弹群加速度曲线变化合理,同时可知领弹控制过载小于从弹控制过载,因此领弹更适用于采用大后掠角飞行,而从弹更适用于小后掠角飞行;由图4(d)与图5(d)可知,2个场景下的速度前置角能够实现在领弹设定跟踪前置角间的平均散布,并结合图4(e)与图5(e)可知,弹群能够对目标实现侧向平面内的围捕攻击态势。2种场景下的脱靶量如表3所示,由此可知,两个仿真场景下弹群能够对目标实现有效的攻击。 表3 2种仿真场景下的脱靶量 针对弹群在相对攻击角度下的协同围捕攻击问题,利用变体飞行器状态可变特性,提出一种基于“领弹-从弹”架构并考虑视场约束的弹群协同围捕制导设计方法,该方法通过对数型Lyapunov函数与积分型Lyapunov函数进行制导律的设计,能够在李雅普诺夫意义下实现稳定。仿真结果表明,所设计制导律能够在视场约束下实现变体弹群以相对攻击角度对目标进行有效的协同攻击。

2.2 弹群协同围捕制导律设计







2.3 稳定性分析


3 仿真验证




4 结论
猜你喜欢
茶叶通讯(2022年2期)2022-11-15 08:53:56茶叶通讯(2022年3期)2022-11-11 08:43:50机械研究与应用(2022年4期)2022-09-15 02:17:04中国生殖健康(2020年5期)2021-01-18 02:59:52教书育人(2020年11期)2020-11-26 06:00:32当代陕西(2020年13期)2020-08-24 08:22:02中国生殖健康(2018年5期)2018-11-06 07:15:42北京航空航天大学学报(2016年9期)2016-11-16 02:02:36北京航空航天大学学报(2016年7期)2016-11-16 01:51:00中国科技信息(2016年19期)2016-10-25 08:17:29
