更换电铲钢丝绳专用机械臂架的结构及动力学分析
2023-11-10 06:32:52陈洪月蔡明航杨辛未戴忠桓
工程设计学报 2023年5期
陈洪月, 蔡明航, 杨辛未, 戴忠桓
(辽宁工程技术大学 机械工程学院, 辽宁 阜新 123000)
矿用电铲广泛应用于大型露天矿。其待提升构件采用钢丝绳连接,钢丝绳是主要受力部件[1-3],这就导致钢丝绳须定期维修、更换。通常采用一种大行程、多自由度专用机械臂架对电铲钢丝绳进行更换。为了保证更换效率及工作稳定性,对机械臂架进行动力学分析并了解其运动特性是十分必要的。
随着机械臂架在工程领域的广泛应用,国内外学者对机械臂的力学特性进行了深入研究。如:赵斌等[4-7]利用Lagrange定理和虚功原理对机械臂的臂杆进行柔性处理,建立其非线性动力学方程,并通过仿真获得了在机械臂工作过程中各杆件的动态特性,但忽略了关节变形对机械臂运动的影响;张玉玲等[8]提出了臂杆刚度主动控制方法,减小了臂杆柔性变形带来的位移变化,提高了机械臂末端的定位精度和运动稳定性,但未对关节的刚度进行控制;王海等[9-11]为了避免在实际操作中影响机械臂的运动精度,建立了柔性机械臂关节的数值模型,利用MATLAB软件分析了机械臂运动轨迹,但未考虑臂杆变形对机械臂运动轨迹的影响;梁明轩等[12]基于“转子-扭簧”柔性关节模型,分析了不同关节刚度对机械臂固有频率的影响;Bilal等[13]建立了单连杆柔性关节机械臂的动力学模型,研究了具有参数不确定性的旋转柔性关节位置的确定方法;Kumar等[14]基于欧拉-伯努利梁和弹簧惯性系统描述了机械臂的运动轨迹,分析了关节运动和惯性耦合引起的机械臂的动态特性。
综上所述,现有对机械臂力学特性的研究中,大多只单独分析臂杆柔性或者关节柔性,很少同时考虑两者。为了使研究更加贴近实际工况,笔者以大行程、多自由度专用机械臂架为研究对象,以其末端执行器提取的钢丝绳重力为主要作用载荷,采用有限元分析方法和动力学分析方法对臂杆和主要铰接关节进行刚柔耦合分析,研究机械臂架更换钢丝绳时机械臂铰接关节的刚度对末端执行器位移的影响,及有/无钢丝绳作用对关节角位移和末端执行器位移的影响。
1 机械臂架结构
机械臂架作为更换电铲钢丝绳的关键设备,其结构是否合理将直接影响钢丝绳更换效率。机械臂架的结构如图1所示,其主要由回转机构、伸缩机构和更换机构等组成。通过各机构的相互配合完成回转、变幅、提升、抓取等动作,实现对电铲钢丝绳的更换。

图1 机械臂架结构Fig.1 Structure of manipulator frame
伸缩机构从内向外依次套接节臂,由5节伸缩大臂组成。其截面形状如图2所示,图中H为截面高度,W为截面宽度,T为板厚,H1为腹板高度。臂与臂之间通过滑块实现滑动。滑块分布如图3所示。采用“单缸插销+绳排”的驱动方式实现伸缩大臂的运动。伸缩机构末端与更换机构连接。
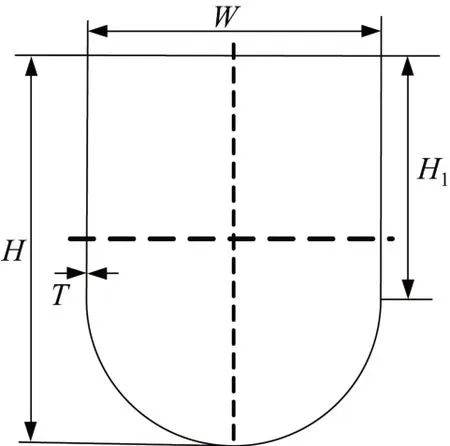
图2 机械臂架伸缩大臂截面Fig.2 Section of telescopic boom of manipulator frame

图3 滑块分布Fig.3 Distribution of sliders
更换机构是抓取和更换钢丝绳的主要构件。更换机构的结构如图4所示,其主要由连接臂、一级变幅液压缸、二级变幅液压缸、弧形臂、伸缩小臂和末端执行器等组成,其中伸缩小臂由4节构成。当伸缩机构调整到合适位置后,一级变幅液压缸推动弧形臂搭扣天轮;二级变幅液压缸推动伸缩小臂变幅到合适位置;4节伸缩小臂由多级液压缸推动,完成伸展和缩回动作;伸缩小臂末端装有末端执行器,用于牵引钢丝绳,同时,小臂末端还装有摄像头,用于操控者观测。
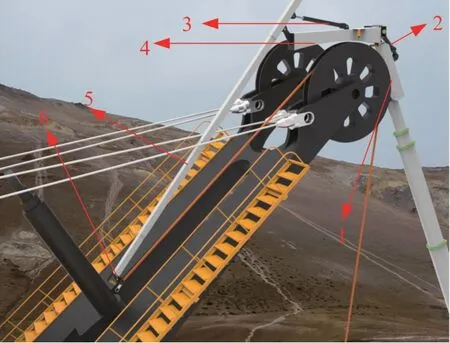
图4 更换机构结构Fig.4 Structure of replacement mechanism
2 机械臂架运动仿真
机械臂架更换钢丝绳时,变幅液压缸推动铰接于回转台的伸缩机构。伸缩机构经变幅下落到电铲吊耳附近抓取钢丝绳,抓取完成后再经变幅上升到电铲天轮附近,其至合适位置后更换机构的弧形臂搭扣天轮,4节伸缩小臂经二级变幅液压缸推动至合适位置后依次伸缩,使钢丝绳沿天轮的绳槽方向被输送到电铲内部而完成钢丝绳一端的输送,然后重复此动作完成钢丝绳另一端的操作。在钢丝绳更换仿真时,对整个机械臂架的杆件进行柔性化,同时对伸缩机构与转台的铰接关节A、连接臂与连接板的铰接关节B、伸缩小臂与弧形臂的铰接关节C进行柔性化,分析不同关节刚度对末端执行器位移的影响及有/无钢丝绳作用对关节角位移和末端执行器位移的影响。
2.1 机械臂架运动约束的建立
根据多体动力学建模理论,采用Pro/E软件创建机械臂架三维实体模型,将它保存为X T格式并导入ADAMS软件生成刚性体机构,添加运动副约束,建立刚体动力学模型。为了与通过APDL(ANSYS parametric design language,ANSYS参数化设计语言)生成的柔性部件的各单位保持一致,须将ADAMS中的默认单位改为M-KG-S-N。机械臂架运动副约束描述如表1所示。
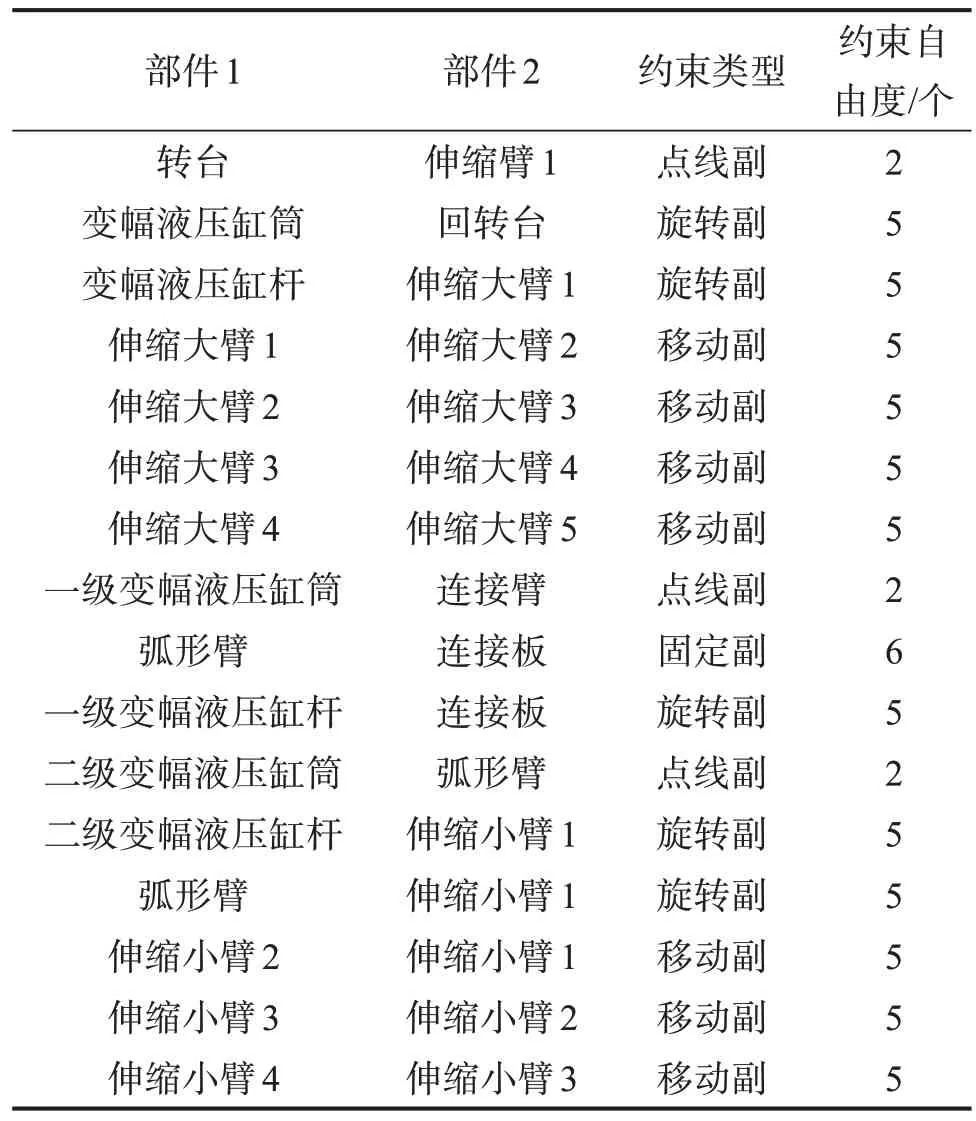
表1 机械臂架运动副约束描述Table 1 Description of constraints for kinematic pair of manipulator frame
根据表1对机械臂架各部件进行运动约束。全刚体无钢丝绳状态下末端执行器的位移如图5所示。机械臂架作空载运动时,在0 —70 s内伸缩小臂在变幅液压缸作用下从最低点缓慢上升,在弧形臂搭扣天轮时末端执行器的位移达到最大值39.245 9 m,之后随着伸缩小臂沿天轮绳槽伸展直至电铲外部边缘,末端执行器的位移缓慢减小。此状态下关节A、B、C的角位移如图6所示。
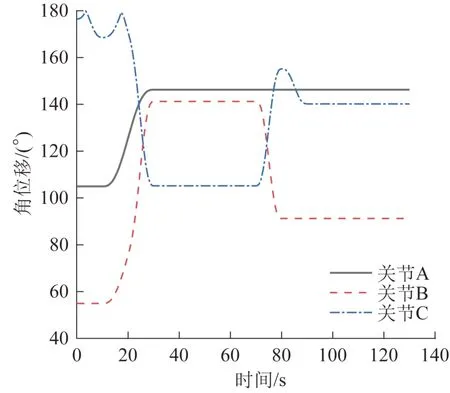
图6 全刚体无钢丝绳状态下关节角位移Fig.6 Joint angular displacement in the state of full rigid body without wire rope
2.2 钢丝绳运动仿真
电铲的工作环境比较复杂,机械臂架会受到多种载荷同时作用。在机械臂架更换钢丝绳时以其末端执行器提取的钢丝绳重力为主要载荷,因此对钢丝绳运动进行仿真是十分必要的。
ADAMS/cable模块把ADAMS二次开发的宏命令集成到cable模块中,可以对柔索类问题进行快速建模和精确求解[15-17]。本设计运用cable模块中的有限元离散化绳索建模方法,将离散化的小球用轴套力进行柔性连接来仿真钢丝绳在起升、输送等环节产生的振动。小球受力模型如图7所示。图中Fx、Fy、Fz和Tx、Ty、Tz分别为小球受到的x、y、z向的力和力矩。
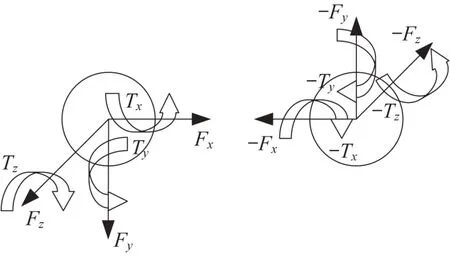
图7 小球受力模型Fig.7 Force model of small ball
绳索离散化时考虑了绳索的质量、惯性等特性,其与天轮的接触是通过球面及适当的横向引导完成的。钢丝绳与天轮的接触参数如表2所示,钢丝绳参数如表3所示。
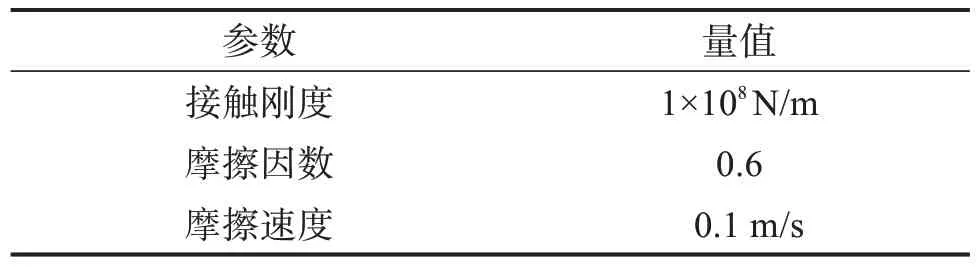
表2 钢丝绳与天轮的接触参数Table 2 Contact parameters between wire rope and wheel

表3 钢丝绳参数Table 3 Parameters of wire rope
在钢丝绳运动仿真过程中,用滑轮代替天轮,用天轮的性能参数表示滑轮的属性,同时在末端执行器质心设立一锚点,以此实现对钢丝绳的抓取。钢丝绳搭扣天轮和输送分别如图8和图9所示。

图8 钢丝绳搭扣天轮Fig.8 Wire rope buckling wheel

图9 钢丝绳输送Fig.9 Wire rope conveying
在更换过程中钢丝绳的张力变化如图10所示。在0 —70 s内被提取的钢丝绳上升至电铲天轮附近,随着所提取钢丝绳长度的增大,钢丝绳之间的张力逐渐变大,在与天轮接触前达到最大值17.483 472 5 kN。由于机械臂与天轮接触,钢丝绳发生抖动,此时其张力发生剧烈突变;钢丝绳完成搭扣后,张力逐渐缓慢变小,但由于抓取绳的长度继续增大,张力值仍大于提起钢丝绳的阶段。
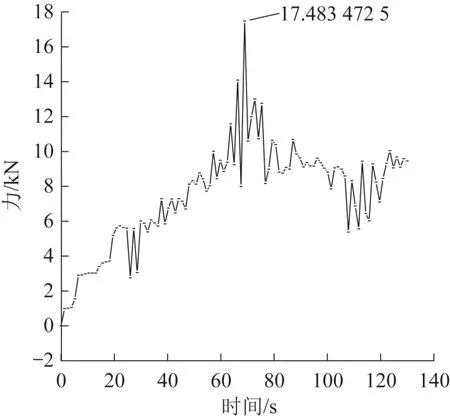
图10 钢丝绳张力变化Fig.10 Tension change of wire rope
2.3 刚柔耦合模型的建立
为了更好地对机械臂架的运动进行实时、有效的预测和控制,利用ANSYS APDL软件生成机械臂架模态中性文件,并将其导入ADAMS进行刚柔耦合分析[18]。具体步骤如下:
1)创建模态中性文件。将在Pro/E中生成的X_T文件导入ANSYS APDL经典界面进行前处理,即进行单元类型选定、材料添加、网格划分、刚性区域和外连接点建立,并对伸缩机构、更换机构逐一柔化,每个部件建立2处刚性区域。采用智能划分的方法划分网格,网格密度定义为2。以伸缩小臂1为例,其刚性区域连接如图11所示。
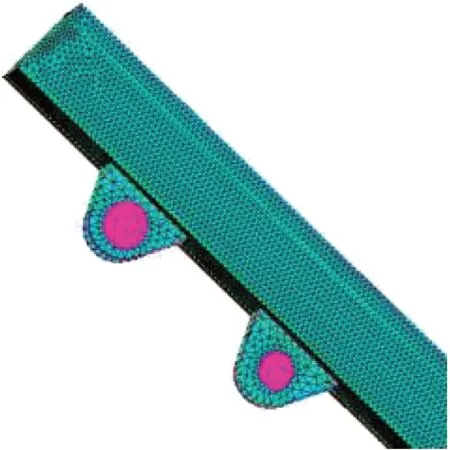
图11 伸缩小臂1刚性区域连接Fig.11 Rigid area connection of telescopic forearm 1
2)替换刚性模型。生成的模态中性文件mnf包含节点号、节点自由度和节点质量等信息。利用ADAMS软件打开创建的机械臂架刚体动力学bin文件,通过make flexible导入模态中性文件,替换原有的刚性部件。为了保证模型替换的准确性,在进行柔性化处理时须将模型整体导入。为了保证替换后的部件正常运动,柔性化后的部件须重新添加约束。
伸缩小臂柔化后末端执行器的位移如图12所示。比较图5与图12可知,伸缩小臂柔化后末端执行器的位移明显小于全刚体无钢丝绳状态,最大值相差0.180 1 m。其位移偏差如图13所示。由图13可知,臂杆柔性处理后,由于小臂的变形量远大于其他臂杆,在70 s后末端执行器的位移偏差发生显著变化。

图12 伸缩小臂柔化后末端执行器的位移Fig.12 End effector displacement after flexing the telescopic forearm
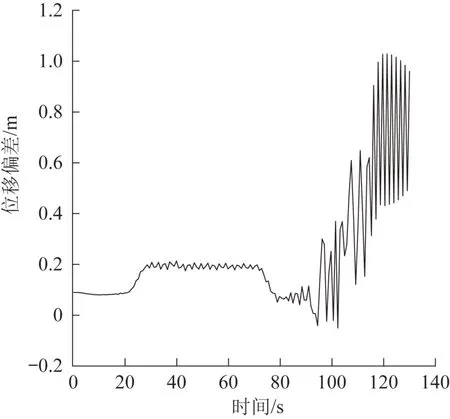
图13 末端执行器位移偏差Fig.13 Displacement deviation of end effector
2.4 机械臂架动力学模型的建立
为了精准地控制在钢丝绳更换过程中机械臂架的运动,采用Lagrange方程对机械臂架运动过程进行动力学建模[19-20]。建模时作如下处理:对臂杆进行柔化;将伸缩机构和更换机构的伸缩小臂简化为长度可变的臂杆1和臂杆3,弧形臂简化为臂杆2;伸缩机构、弧形臂、伸缩小臂的质量分别用m1、m2、m3表示,其长度分别用l1、l2、l3表示;忽略末端执行器及工程车底盘支撑的弹性变形的影响。建立机械臂架坐标系,如图14所示。图中:O-x0y0为整体坐标系,O1-x1y1为随动坐标系,原点O、O1重合。
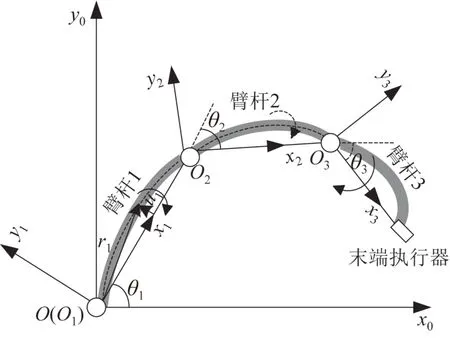
图14 机械臂架坐标系示意Fig.14 Schematic diagram of manipulator frame coordinate system
式中:ro1为臂杆1上任一点在整体坐标系中的位置向量;r1为臂杆1上任一点变形前在随动坐标系中的位置向量;μ1为臂杆1在随动坐标系中y向变形量;v1为臂杆1在随动坐标系中x向变形量;R1为随动坐标系到整体坐标系的变换矩阵,
式中:θ1为随动坐标相对于整体坐标的转角,也就是臂杆1的变幅角度。
臂杆l的速度为:
反对称矩阵A为:
则臂杆1的速度也可以表示为:
臂杆1的动能T1为:
式中:ρ1为臂杆1的线密度。
式中:r2为臂杆2上任一点变形前在随动坐标系O2-x2y2中的位置向量;R2为随动坐标系O1-x1y1到随动坐标系O2-x2y2的变换矩阵;θ2为臂杆2相对于臂杆1的变幅角度。
臂杆3的速度为:
式中:r3为臂杆3上任一点变形前在坐标系O3-x3y3中的位置向量;R3为坐标系O2-x2y2到坐标系O3-x3y3的变换矩阵;θ3为臂杆3相对于臂杆2的变幅角度。
则机械臂架的总动能为:
机械臂架工作时产生的势能主要包括臂杆弯曲变形引起的应变能、臂杆变形引起的重力势能变化量和臂杆运动所产生的重力势能变化量,所以其势能U为:
式中:E为材料弹性模型;I为臂杆截面惯性矩。
将式(11)代入第二类拉格朗日方程:
式中:L为系统用各广义坐标qj和各广义速度qj表示的动能;Tj为对应于qj的力矩;j为完整约束方程个数。
将第二类拉格朗日方程表示成动力学方程:
式中:M为广义质量矩阵;为离心力和哥式惯性力的变量矩阵;k为刚度矩阵;q为位置矢量;T为驱动力矩。
在驱动力已知的条件下,利用MATLAB软件求解关节A、B、C的角位移,并与通过ADAMS软件求解得到的角位移进行对比,结果如图15所示。
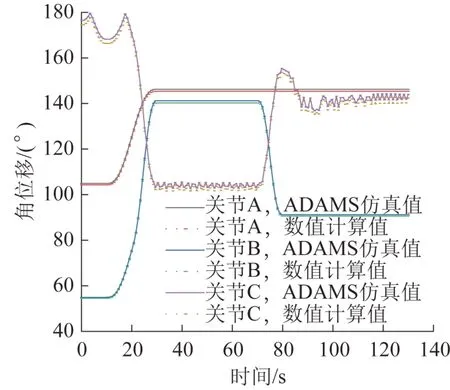
图15 柔性杆关节角位移Fig.15 Angular displacement of flexible rod joints
由图15可知,通过数值计算与模型仿真得到的关节角位移之间的偏差较小,两者基本重合。产生偏差的原因是不同软件的计算精度不同,由此验证了所建机械臂架动力学模型的正确性。
2.5 关节耦合
由于机械臂架是一个大行程、多自由度的串联连杆机构,除了对机械臂进行柔性处理外,还须对铰接部位的关节A、B、C进行柔性处理。用扭转弹簧等效替代柔性关节,在关节A、B、C处添加虚拟圆盘,在原刚体约束中进行替换,实现关节的柔性处理。关节约束如表4所示,关节柔性处理流程如图16所示。

表4 关节约束Table 4 Joint constraints

图16 关节柔性处理流程Fig.16 Flow of joint flexible treatment
3 结果分析
3.1 不同关节刚度下末端执行器运动特性分析
为了研究关节刚度对钢丝绳更换稳定性的影响,运用控制变量法,在臂杆进行了柔性处理的前提下,分别对其中一个关节进行柔性处理,而其余两个关节为刚性连接,来分析末端执行器的位移变化。
根据关节结构的工作特性,定义关节A的刚度系数分别为1.5×106,6.0×106,1.5×107N·mm/(°),对关节A进行柔性处理。关节A刚度对末端执行器位移的影响如图17所示。
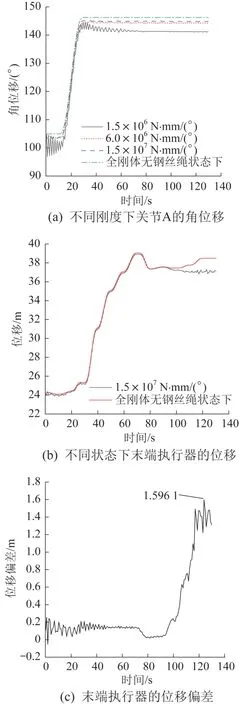
图17 关节A刚度对末端执行器位移的影响Fig.17 Influence of joint A stiffness on end effector displacement
不同刚度下关节A的角位移如图17(a)所示。由图可知,当关节A的刚度系数为1.5×107N·mm/(°)时,机械臂架更换钢丝绳的过程较稳定,晃动程度较低,关节A的角位移与全刚体无钢丝绳状态较接近。
选取关节A的刚度系数为1.5×107N·mm/(°),分析末端执行器的位移变化,并与全刚体无钢丝绳状态进行比较,结果如图17(b)所示,位移偏差如图17(c)所示。由图可知:当关节A的刚度系数为1.5×107N·mm/(°)时,末端执行器的位移变化基本小于全刚体无钢丝绳状态;在100 s以后,位移偏差显著增大,这是因为此时伸缩小臂抓取钢丝绳并输送到电铲内部,对伸缩小臂进行柔性处理后,伸缩小臂的柔性变形远大于伸缩大臂,所以此阶段末端执行器位移偏差显著增大,最大偏差达1.596 1 m。
定义关节B的刚度系数分别6×104,1.5×105,1.0×106N·mm/(°),对关节B进行柔性处理。关节B刚度对末端执行器位移的影响如图18所示。
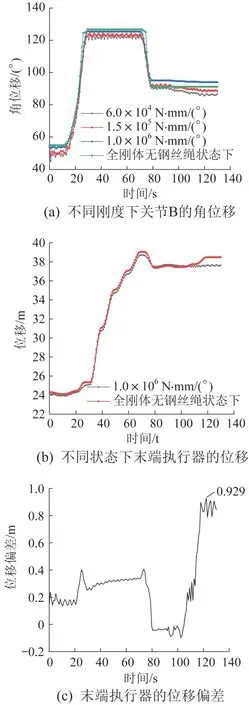
图18 关节B刚度对末端执行器位移的影响Fig.18 Influence of joint B stiffness on end effector displacement
不同刚度下关节B的角位移如图18(a)所示。由图可知:当关节B的刚度系数为1.0×106N·mm/(°)时,机械臂架的运动振幅较小,比较接近全刚体无钢丝绳状态;在20 —30 s和70 —80 s内进行了2次运动,分别实现了钢丝绳的提取和搭扣天轮。
由图18(b)、18(c)可知:对关节B进行柔性处理后,柔性部件的变形导致末端执行器的位移变化小于全刚体无钢丝绳状态;在80 —100 s内位移偏差几乎为0,这时由于此时机械臂架的弧形臂搭扣天轮,缓解了臂和关节的柔性变形。同时比较图17(c)与图18(c)可知,关节A的柔性处理对机械臂架的运动影响大于关节B。
定义关节C的刚度系数分别1.5×104,6.8×104,1.8×105N·mm/(°),对关节C进行柔性处理。关节C刚度对末端执行器位移的影响如图19所示。
由图19可知,当关节C的刚度系数为1.8×105N·mm/(°)时,机械臂架的运动与全刚体无钢丝绳状态较接近。比较图17至图19可知:关节A刚度对末端执行器位移的影响与关节C相似;在80 —100 s内,由于弧形臂搭扣天轮,3个关节对末端执行器位移的影响都较小,此时末端执行器的位移偏差趋近为0;在100 s以后,由于伸缩小臂的变形程度远大于伸缩大臂,末端执行器的位移偏差显著增大,最大位移偏差为在关节C影响下的1.788 9 m,此时为了避免钢丝绳与部件发生碰撞,应缓慢输送钢丝绳。
3.2 有/无钢丝绳作用对关节角位移和末端执行器位移的影响
由上述分析可知,当关节A的刚度系数为1.5×107N·mm/(°)、关节B的刚度系数为1.0×106N·mm/(°)、关节C的刚度系数为1.8×105N·mm/(°)时,机械臂架运动最接近于全刚体无钢丝绳状态。选取关节A、B、C的刚度为取优刚度,分析有/无钢丝绳作用对关节角位移及末端执行器位移的影响,结果如图20和图21所示。

图20 有/无钢丝绳作用对关节角位移的影响Fig.20 Influence on joint angular displacement with/without wire rope action
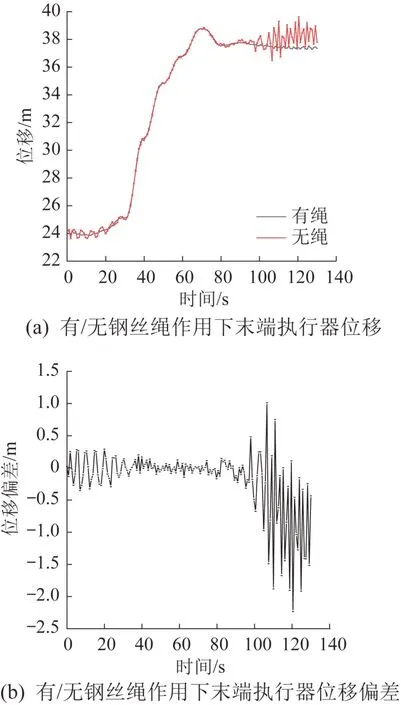
图21 有/无钢丝绳作用对末端执行器位移的影响Fig.21 Influence on end effector displacement deviation with/without wire rope action
由图20可知,当未抓取钢丝绳时,机械臂架的关节位移偏差较大,并且关节C的振幅远大于关节A和B,关节C的最大角位移偏差为18.501 6°,关节A、B的最大角位移偏差分别为0.590 2°和5.689 7°,这是由于关节C连接伸缩小臂,而伸缩小臂的变形程度大于伸缩大臂,并且装在其前端的末端执行器是抓取钢丝绳的直接部件。由图21可知,末端执行器的位置偏差在100 s以前呈周期性变化,在伸缩小臂开始输送钢丝绳到电铲内部时,由于伸缩小臂和关节C的柔性程度大于其他部位,导致100 s后末端执行器的位移偏差出现剧烈波动。
4 结 论
1)采用有限元分析方法和动力学分析方法对机械臂架的臂杆和主要铰接关节进行柔性处理,并建立机械臂架动力学模型,以末端执行器提取的钢丝绳重力为主要作用载荷,来分析末端执行器的运动特性。
2)通过仿真发现,在较大的关节刚度系数下,机械臂架的运动状态趋近于全刚体无钢丝绳状态,关节C的刚度对末端执行器位移的影响最大,产生的关节位移偏差也最大。
3)当关节A的刚度系数为1.5×107N·mm/(°)、关节B的刚度系数为1.0×106N·mm/(°)、关节C的刚度系数为1.8×105N·mm/(°)时,机械臂架空载运行时产生的关节角位移偏差及末端执行器位移偏差明显,而抓取钢丝绳时移偏差均较小,关节A角位移偏差最小,偏差最小值为0.590 2°。
4)本文为进一步研究机械臂架的工作稳定性及运动精度控制提供了参考。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06 11:40:14
机械管理开发(2021年10期)2021-10-21 12:30:02
能源与环保(2021年8期)2021-08-27 07:29:24
机电信息(2021年17期)2021-07-01 05:14:00
机械管理开发(2021年4期)2021-06-05 09:13:36
机械管理开发(2020年12期)2020-04-12 15:12:40
制造技术与机床(2019年12期)2020-01-06 03:17:44
组合机床与自动化加工技术(2019年5期)2019-05-24 03:48:50
课程教育研究·学法教法研究(2018年14期)2018-08-11 09:09:46
光学仪器(2016年5期)2017-01-12 14:28:05