
密闭舱内氧传感器自动标定方法研究
2023-11-10 01:40:34潘点飞刘力涛葛江亚郑为阁
上海航天 2023年5期
潘点飞,刘力涛,唐 斌,葛江亚,王 魁,郑为阁
(中国航天员科研训练中心,北京 100094)
0 引言
氧是维持人与动植物生存必不可少的元素,氧浓度传感器和氧化锆传感器常用于测量气体中氧浓度或氧分压。氧浓度传感器和氧化锆传感器(文中统称为氧传感器),均采用电化学反应原理,将氧气成分转化为电信号,具有测量精度高、响应快、稳定性好等特点[1],是检测密闭舱内氧气浓度的重要方法,被广泛应用于载人航天、潜艇、工业控制、医疗科研等领域。氧传感器均属于消耗性传感器,如氧化锆传感器,其使用寿命取决于电极的消耗,氧化锆传感器的性能由其核心材料陶瓷结构决定[2-8]。随着电极消耗、电解液蒸发和陶瓷结构稳定性降低,其测量精度、稳定性逐渐丧失,需采用定期标定的方法,保证其测量确定性[9-12]。常规环境下,可采用已知浓度的标气瓶进行校准,而在载人航天器、潜艇等特殊密闭环境下,常规标定方法不易实施,且成本高、风险大。
密闭舱内一般同时采用多组、多只氧浓度传感器和氧化锆传感器测量氧气成分,由于传感器分布位置不同、工作模式不同,其测量值的变化特性也不同[13]。当部分传感器性能下降时,其测量结果出现精度误差及漂移特性,导致各传感器之间的测量值表现出不一致性。为适用密闭舱内长期测量的需求,研究氧传感器自主高效的标定方法,是保证氧气成分测量精度、稳定性和可靠性的有效手段。
根据传感器测量数据,对数据分析处理,提取数据变化特征,采用基于数据融合技术的自动标定方案。监测到氧气成分测量数据超出额定阈值时,实施系统自动标定,既提高传感器定期标定的效率,又保证密闭内氧气成分测量准确性与稳定性,进而延长氧传感器的使用寿命。
1 多传感器数据融合技术
多传感器数据融合,利用多种类型、多只数量传感器的信息与数据,在一定的准则下进行综合分析处理,以获得更加有效的数据信息。与单一传感器数据相比,多传感器数据融合技术提高了测量信息的可靠性与健壮性,增强数据的可信度,提高信息的利用率。传感器数据融合与概率统计、神经网络、模式识别、人工智能等技术后相结合,在信息化、智能化、全局化等方面提供广阔的应用空间[14]。
多传感器数据融合的形式常分为3 类:数据级融合、特征级融合和决策级融合。数据融合的方法有加权法、滤波法、神经网络法等[15]。不论采用何种方法,传感器测量偏差值(甚至失效数据)均会影响到最终的测量结果,导致对环境信息错误判断。分析并处理传感器采集的数据,识别异常数据,筛选出最优基准值,对增强密闭舱氧传感器标定的可靠性及鲁棒性具有重要意义。
检测测量数据异常值的方法较多,常用的方法有罗曼诺夫斯基准则、狄克松准则、格拉布斯准则以及拉依达准则等[16]。格拉布斯准则在数据量不大的情况下,可靠性能较好,本文在该准则的基础上,提出基于多传感器数据融合技术的自主氧传感器标定方法。
利用格拉布斯准则对传感器测量数据进行残差值分析判断,如测量值超过格拉布斯临界值,则认为该测量值为不可靠数据,不能参与传感器标定的基准值计算。将传感器测量数据按从小到大排序为yi,其中y1<y2,...,yn,n为样本数,yˉ为平均值,σ为标准差,g0(n,a)为统计临界数值,可得g1、gn分别为
如g1≥gn且g1>g0,则认为g1为异常值;如g1<gn且gn>g0,则认为gn为异常值;如g1<g0且gn<g0,则样本数据中不存在异常值。统计临界数值g0(n,a)见表1[17],其中n为样本数,a为显著水平,0.050 和0.010 为错输概率,对应置信概率分别为95%和99%。

表1 临界值表Tab.1 Critical value table
多只传感器同时测量舱内氧分压,测量数据之间的相互关联性反映传感器变化的一致性,确定一致性及稳定性较好的传感器测量值作为基准值,是氧分压传感器自主标定的基础。
假设某一时刻,氧传感器i、j测量结果分别为Ti和Tj,引入dij表示测量值Ti与Tj之间的融合度,dij越大表示传感器i与j的测量值相差越大,反之则两者偏差越小。
式中:Qi为Ti的方差。
其表达式为
如舱内同时存在m个传感器测量当前氧分压,各传感器之间的融合度dij(i,j=1,2,…,m)构成融合度矩阵Dm。其表达式为
依据相容矩阵及相容性阈值,将相容矩阵进行归一化处理,得到标准化相容矩阵Rm。其表达式为
rij表达式为
式中:pij为传感器相容性阈值。
如果rij=0,表明传感器i与j的相容性差,相互不关联。如果rij=1,表明传感器i与j的相容性强,两者相互关联[18]。如某一传感器测量值仅被少数传感器测量值关联,则认为其测量结果不可靠,不适合作为标定基准值。反之,如某一传感器的测量值与多数传感器测量值相关性强,则其为强关联数据。据此可得到强关联数据融合集,有利于确定可靠的标定基准值。
2 传感器测量数据变化特性分析
以氧化锆传感器为例,在氧化锆传感器寿命末期,传感器的陶瓷结构稳定性及气体扩散孔稳定性逐渐降低,氧传感器敏感探头中的电解液缓慢挥发,电化学反应活性变弱[19],导致其测量精度和稳定性变差。处于寿命末期氧化锆传感器a、b、c 的测量值漂移特性曲线如图1 所示。

图1 氧化锆传感器测量曲线Fig.1 Measured curves of the zirconia oxygen sensors
由图1 可知,密闭舱内氧浓度维持在约22 kPa的情况下,传感器a 呈缓慢上升趋势,传感器b 呈下漂降趋势,传感器c 呈先上漂后快速下漂的趋势。在实际应用中,为提高测量可靠性,在同一位置往往布置多只传感器,每组传感器通过特定取平均算法,获得最终测量的物理值。当同组氧化锆传感器相互测量偏差超过额定阈值,将导致该组传感器无法得到有效的测量结果,甚至引起传感器多只超差报警提示。
上述传感器a、b、c 相对基准值测量偏差如图2所示。如3 只传感器属于同组配置,将出现异常结果。因此,通常采用传感器系数重新标定的方法,消除漂移影响,延长传感器使用寿命。

图2 氧化锆传感器测漂移量曲线Fig.2 Drift curves of the zirconia oxygen sensors
氧浓度传感器、氧化锆传感器的物理值计算公式为
式中:x为传感器测量电压值,V;P为环境总压,kPa;A、B为公式系数;y为氧气成分物理值;e为常数,取2.718 3。
修正计算公式中的系数A、B均可达到消除漂移的目的。其中,氧浓度传感器为线性公式,可直接通过修正系数获得标定后的新系数。本文主要分析氧化锆传感器的自标定方法,其基准值确定策略及系数修正流程同样适用于氧浓度传感器,不再赘述。上述方法需先确定校准基准值,再根据经验公式反算出校准后的系数,最后由控制器软件实施系数更新。
地面环境中,可通过校准气瓶确定待标定的基准值,但不易确定在轨航天器的校准基准值。系统软件更新维护流程繁多复杂、风险点多、不易控制。从待标定的传感器系数确定,到系数更新真正实施需要一定周期,存在滞后性,导致传感器更新后的系数时效性较差。
3 多k 值标定方法实现与验证
3.1 传感器标定基准值确定
以地面长寿命验证试验中的氧传感器a~h 为例,采用前文所述多传感器数据融合技术,筛选稳定性和一致性较好的传感器测量值作为标定基准值。
选择2 个不同时间氧传感器测量数据,分别设为Ti和Tj,各传感器测量值见表2。
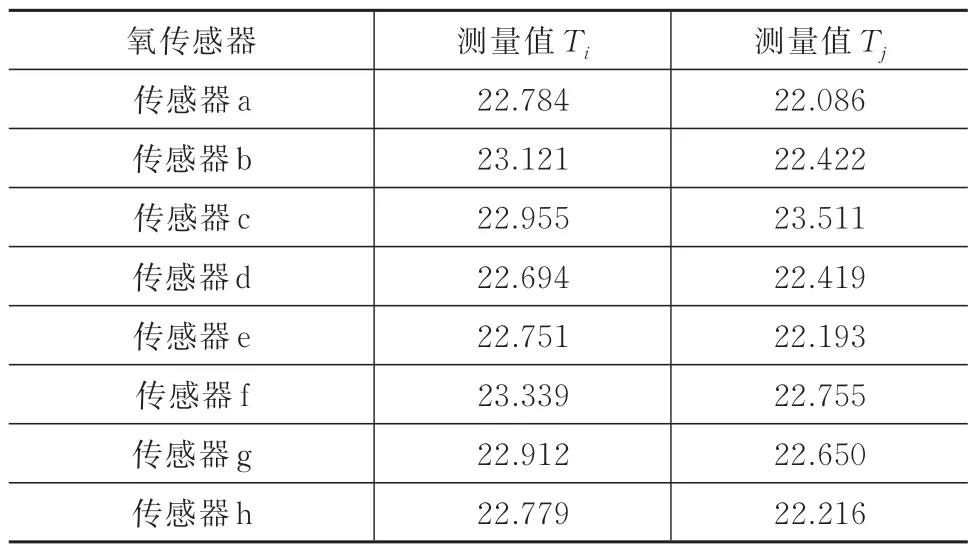
表2 氧传感器测量结果Tab.2 Measured results of the zirconia oxygen sensors
由表2 可知,Ti=[22.784 00,23.121 27,22.955 00,22.694 00,22.751 00,23.339 00,22.912 00,22.779 00],将传感器测量结果由小到大排序为[22.694 00,22.751 00,22.779 00,22.784 00,22.912 00,22.955 00,23.121 27,23.339 00],其均值为22.531 4,标准差0.427 3,测量值残差矩阵为g=[1.042 8,0.791 9,0.738 1,0.263 1,0.257 0,0.277 5,0.523 2,2.292 3],n=8,依据格拉布斯表取g0=2.032,g1<gn且gn>g0,认为gn为异常值,其对应的测量值不可靠,将其剔除后传感器测量均值为22.856 6。
同理,计算氧传感器数据Tj均值为22.391 5,剔除异常值后,不同时刻传感器测量平均差值为0.465 1,并将其设为相容性阈值,其中T1为:Tj=[22.085 8,22.421 6,23.511 0,22.419 0,22.193 0,22.755 0,22.650 0,22.216 0]。因此,不同时刻各传感器测量数据之间融合度矩阵Dm为
根据相容性阈值0.465 1,对相容性矩阵进行归一化处理,得到标准化相容矩阵Rm为
据此可得各传感器测量结果的关联性,序号为1、5、8 的3 只传感器测量结果与其他传感器测量值强关联,可将其作为传感器标定的基准值。
3.2 单点k 值标定方法
密闭舱内氧化锆传感器系数标定主要采用单点k 值标定方法,即选择标定时刻t1氧化锆传感器测量结果与舱内氧分压基准值的修正系数k,通过五点曲线拟合方法,得出当前待修正传感器系数。具体步骤如下。
1)根据专家知识库,选择稳定性及一致性较好的氧浓度传感器测量值作为标定基准值Y0。
2)通过氧化锆传感器输出Y1与基准值之间的偏差,得到修正系数k=Y0/Y1。
3)假设总压P为100,氧浓度T为10~30 kPa的氧化锆传感器与氧传感器一致性好,此时对应未修正的氧分压则为氧浓度T/k,根据氧化锆计算公式,反算出氧化锆电压值应为
式中:A和B为当前未修正的系数。
1)选取10~30 范围5 个点,根据上述反算公式得到电压和输出之间的5 个点关系。
2)根据这5 个点,拟合出新的修正后公式系数A′和B′。设A′和B′为正,氧分压公式表示为
如选取t1时刻的修正k值(单点k值),即可实现对该时刻传感器测量电压x1的修正。其中,10~30 kPa 范围内的修正一致只是一种理想假设。但实际上,在氧化锆传感器寿命末期,即使舱内氧分压未发生变化,其测量电压值会不断漂移,一旦氧化锆测量电压继续漂移,上述修正效果则明显降低。
分析试验数据,密闭舱内氧分压大部分时间维持在22~23 kPa,氧化锆测量值不断漂移(上漂或下漂),其实质是传感器电压值漂移。常规修正方法仅实现了当前电压值下测量的一致性,当电压继续漂移,修正系数k无法保证电压为x2时的一致性。因此,单一k值修正方法的适应范围较窄,导致传感器系数修正的频次不断增加。
3.3 多点k 值标定方法
将原单点k 值修正法改进为多点k 值修正法,即选取t1时刻对应的电压值x1及修正值k1,再选取氧分压修正范围漂移1 kPa,对应t2时刻的电压值x2及修正值k2,根据氧化锆公式可得:
如氧分压漂移修正范围选择1 kPa,考虑氧分压公式中总压变化的影响,取舱内总压经验值上限,即P2为100 kPa,则上式中,Y2=Y1±1,P2=100 kPa,根据上述多项式可求得修正后的传感器系数A′和B′。
该方法可保证氧化锆传感器测量电压值在x1~x2范围内漂移,与基准值修正一致。
3.4 方法验证
以地面长寿命验证试验中的传感器为例,对处于寿命末期的3 只氧化锆传感器Ⅰ、Ⅱ和Ⅲ进行系数标定,修正前后,氧分压传感器系数见表3。

表3 氧化锆传感器标定系数(单点k 值)Tab.3 Calibration coefficients of the zirconia oxygen sensors(single-point k-factor)
上述3 只氧化锆传感器于ti进行单点k 值系数修正,修正后其测量结果与基准值一致。随传感器工作时间增加,在舱内氧分压基本稳定的情况下,其测量结果仍不断漂移,2 个月内各传感器测量漂移量如图3~5 所示。

图3 氧化锆Ⅰ、Ⅱ、Ⅲ单点标定曲线Fig.3 Results of the zirconia oxygen sensors Ⅰ,Ⅱ,andⅢ obtained by the single-point calibration method
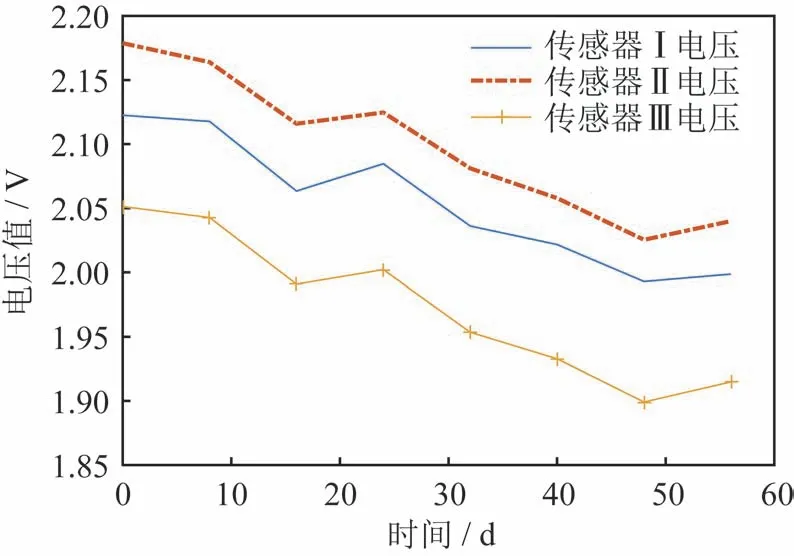
图4 氧化锆Ⅰ、Ⅱ、Ⅲ电压值漂移量曲线Fig.4 Voltage drift curves of the zirconia oxygen sensorsⅠ,Ⅱ,and Ⅲ
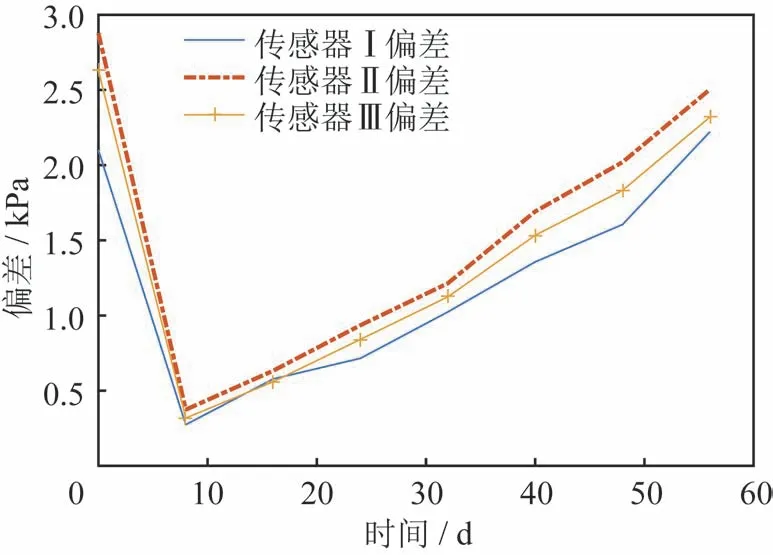
图5 氧化锆Ⅰ、Ⅱ、Ⅲ物理值漂移量曲线Fig.5 Physical quantity drift curves of the zirconia oxygen sensors Ⅰ,Ⅱ,and Ⅲ
采用单点k 值标定后,在一定程度上延长了氧化锆传感器使用寿命,但其输出物理量(氧分压)与基准值的差异仍在持续增大,直至超出额定阈值。综上所述,该方法适应范围较窄、延寿效果有限。
采用多点k 值点修正方法,氧化锆Ⅰ、Ⅱ和Ⅲ的修点同样选择t1时刻,修正范围为1 kPa,则由式(14)与式(15)可得到新的修正系数,见表4。
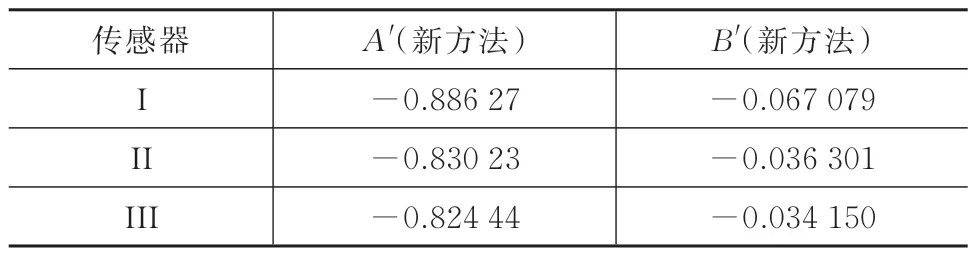
表4 氧化锆传感器标定系数(多点k 值)Tab.4 Calibration coefficients of the zirconia oxygen sensors(multi-point k-factor)
采用前文多传感器数据融合方法,确定标定基准值为1、5 和8 的3 只氧传感器测量平均值,采用多点k 值修正方法得到修正结果,如图6 所示。

图6 2 种标定方法比较曲线Fig.6 Comparison curves of two calibration methods
单点k 值标定方法,在k 值选定标定时刻的标定效果较好,但随着传感器测量电压值的继续漂移,2个月后,测量电压值漂移量达0.1 V,相应物理量漂移超过2.0 kPa。而多点k 值标定方法,在相同传感器电压漂移量下,物理量的漂移不超过0.5 kPa。综上所述,采用多点k 执行修正方法可适应的传感器漂移范围更广,与标定基准值测量误差更小。
新标定方法矫正了传感器测量值与基准值的测量误差,同时保证两者变化趋势的一致性,能较好地解决氧气成分测量正确性的问题。虽然测量灵敏度精度略有下降,但满足使用要求,是延长使用氧传感器寿命的有效方法。
4 结束语
本文分析了密闭舱内氧气测量传感器变化特性,运用多传感器数据融合方法确定传感器自动标定基准值,并提出一种改进的传感器标定方法。该方法可有效缩短传感器标定频次,降低系统运行风险,对处于寿命末期的氧传感器,其适应范围更广,测量误差更小,为氧传感器自动标定、延寿使用提供有效的参考。
猜你喜欢
价值工程(2023年33期)2023-12-13 01:24:56
心肺血管病杂志(2020年3期)2021-01-14 00:42:16
数字技术与应用(2020年5期)2020-08-04 09:50:33
医疗装备(2020年9期)2020-05-28 12:52:54
电脑知识与技术(2018年11期)2018-07-28 07:19:12
佛山陶瓷(2017年7期)2017-09-06 06:17:00
中华老年口腔医学杂志(2016年5期)2016-03-01 02:24:36
北京航空航天大学学报(2015年8期)2015-04-13 06:13:28
西南军医(2015年2期)2015-01-22 09:09:45
针灸临床杂志(2012年10期)2012-09-08 03:58:00
