高分遥感影像的道路网提取实验设计
2023-11-09 10:56郭杜杜王庆庆
实验室研究与探索 2023年8期
郭杜杜, 王庆庆, 赵 亮, 王 洋
(新疆大学a.交通运输工程学院;b.机械工程学院,乌鲁木齐 830046)
0 引 言
道路作为交通四要素(人、车、路、环境)的重要组成部分,一直是交通信息采集的重要目标[1]。目前交通行业主要是采用全球定位系统(Global Positioning System,GPS)与人工核查相结合的方式进行道路信息数据的采集,存在数据收集周期时间长,成本高,数据受主观因素影响大,质量得不到保障等问题[2]。道路网信息的自动提取和建立,对于我国规模日益庞大的道路网建设、养护和监管起着重要作用,也为无人驾驶领域的研究提供基础数据。
近年来,通过高分遥感影像进行道路信息提取并矢量化已成为道路网数据获取的重要来源。连仁包等[3]将局部形态学梯度图引入传统圆形模板匹配算法,减少人工设定的参数,提高算法的适应性;Liu等[4]对道路几何特征进行推断,构建农村公路几何知识库,利用知识推理实现路网提取;Cheng 等[5]引入半监督方法,结合多尺度滤波和多向非最大抑制算法,提取出平滑完整的路网中心线。贺浩等[6]基于道路语义特征信息设计了一种编解码的深度学习网络,实现道路中心线的提取。基于深度学习的提取方法需要大量的训练样本,提取成本较高,基于模板匹配、面向对象等方法提取效果不佳,人为参数设定较多,对道路网自动提取效果的测试和优化仍需要继续探索。
本文以城市区域原始高分遥感影像为研究对象,使用卷积滤波和线性均衡算法,抑制噪声信息,清晰化道路边缘;对道路和非道路地物进行多尺度分割和最近邻特征匹配,实现道路初步提取;利用形态学闭运算对初步提取结果进行后处理和路网融合,最终实现城市区域路网的快速提取和矢量化。
1 实验总体设计
图1 所示为本文道路网提取实验总体框架。根据道路网提取实验的需求,选择适当分辨率的高分遥感影像数据,结合道路及环境特点进行图像预处理,实现道路初步提取,其次对初步提取的道路进行优化,接着对提取的道路进行路网融合,最终实现道路网的提取。

图1 道路网提取实验总体框架
2 实例验证
2.1 实验数据
实验采用的影像是空间分辨率为2 m,包含3 个波段的卫星高分遥感影像,图2 所示为某区域的原始高分遥感影像截图。

图2 原始影像
2.2 实验过程
2.2.1 图像预处理
图像预处理采用卷积滤波[7]的图像去噪方法和线性均衡[8](Linear Equalization,LE)的图像增强方法。采用的LE方法是将直方图累积在2% ~98%之间的像元值拉伸,取直方图累积在2%处对应的光谱值为最小值,98%处对应的光谱值为最大值。若像元值在最小值和最大值之间,则将其拉伸至0 ~255;若像元值小于最小值,则将其改为对应的最小值;若像元值大于最大值,则将其改为255。
图3 所示为图像预处理后的效果。由图可见,预处理后的图像中道路噪点减少,道路边缘明显清晰,将有助于减少下一步道路提取的“椒盐”现象[9]。

图3 预处理后影像
2.2.2 多尺度分割
多尺度分割利用的是一种自上而下的分割原理,但其本质却是一个不断自下而上合并的过程[10]。该过程依据光谱、形状、纹理等多种特征,按照同质性原则不断进行区域合并,直到所有合并后的区域都比设置的分割尺度小,则多尺度分割过程完成。具体分割流程如图4 所示。

图4 多尺度分割流程
采用ESP2 工具[11]对影像自动进行最佳分割尺度的找寻,该工具以不同的分割尺度下影像对象同质性的局部方差(Local Variance,LV)作为分割对象层的平均标准差,并用LV的变化率值(Rate of Change of LV,ROC-LV)来衡量分割效果,当LV呈现峰值时,即为最佳分割尺度。最终将最佳分割尺度可视化,见图5。

图5 最佳分割尺度
经过对LV 的各个峰值进行筛选,确定的各区域分割具体参数为分割尺度90,颜色因子0.4,形状因子0.8,光滑度0.6 以及紧致度0.4。最终的分割结果如图6 所示。

图6 分割结果
2.2.3 最邻近分类初步提取
采用最邻近分类算法[12]进行图像分割后的道路提取。最邻近分类算法是利用基于对象特征定义的隶属度函数进行分类。在最邻近分类的过程中,会对照选择的代表性样本,在需要分类的对象中寻找与代表性样本最接近的其他对象。判别是否接近的依据是待分类对象的隶属度值是否超过一定的阈值。具体如下:
(1)建立样本库。通过选定道路对象特征和非道路对象特征构成样本库,建立的样本库将是后面进行道路和非道路类别划分的重要依据。
(2)最邻近特征的配置。对选定的样本进行最近邻特征的配置,主要选取样本对象的各个波段的光谱,均值、亮度、标准差以及长宽比和密度等参数特征对知识特征库进行构建。
(3)分类算法的执行。根据建立的样本库以及配置的相应特征进行道路和非道路类别的提取。算法执行过程中的计算步骤:
步骤1计算待分类样本与代表性样本之间的距离。
步骤2根据计算的距离d进行隶属度函数z(d)的判别。
式中:k为调节参数,决定z(d)的增长;functionslope为调节因子,决定隶属度函数的宽窄,参数值越小,函数越窄,一般默认值为0.2。
步骤3根据计算得出的隶属度值来进行待分类对象的判别。
该区域的道路目标提取结果如图7 所示,初步提取的结果中道路断裂的情况较为明显,且道路边缘存在“锯齿形”现象。

图7 初步提取结果
2.2.4 后处理及路网融合
形态学闭运算具备能够弥合小裂缝而保持总的位置和形状不变的优点,是图像处理与分析中常用的一种方法。形态学闭运算包含“膨胀”和“腐蚀”两部分内容,其定义式如下:
式中:·为卷积运算符;⊕和Θ 为膨胀和腐蚀;a 和b为运算对象。
形态学闭运算流程如图8 所示,其中A 表示初始图像,B表示卷积核,C 表示膨胀后图像,D 表示腐蚀后的最终图像。首先进行“膨胀”操作,“膨胀”的本质是求局部区域内像素点的最大值[13]。膨胀的具体实现过程就是将图像或图像的一部分区域(见图8 中A区域)与卷积核(见图8 中B区域)进行卷积。卷积核可以是任意的形状和大小,它拥有一个单独定义出来的参考点。通常情况下,卷积核是一个小的带有参考点和实心正方形或者圆形。卷积核B 与A 区域及进行卷积计算,即计算卷积核B 覆盖区域像素点的最大值,并把这个最大值赋值给参考点指定的像素,最终实现A区域的逐渐增长;接着对“膨胀”过后的C区域进行“腐蚀”,“腐蚀”则是求局部区域内像素点的最小值[14]。腐蚀的过程则是将卷积核B 与C 区域进行卷积计算,计算卷积核B 覆盖区域像素点的最小值,并把这个最小值赋值给参考点指定的像素,实现图像中的C区域逐渐缩减,实现断裂部分的填补,最终达到D区域的效果。

图8 闭运算示意图
对初步提取道路的断裂部分进行形态学闭运算,使得断裂的道路能够连接起来,同时使得提取的道路边缘更加平滑,如图9 所示。

图9 道路提取优化
对提取出的道路对象进行道路类别像素级的连贯融合,使得提取的道路网形状更加清晰,并将提取出的道路矢量图附加在原始影像上,最终提取结果见图10。

图10 最终提取结果
3 精度评价
3.1 评价指标
为对道路网提取的精度进行全面客观的评价,本文基于混淆矩阵[15]计算生产者精度、用户精度、总体精度以及Kappa 系数[16]4 个指标。生产者精度指的是算法准确判定的像元数与该类总像元数的比值;用户精度指的是用户准确判定的像元数与该类总像元数的比值;总体精度指的是被准确分类的像元总数与所有像元总数的比值;Kappa 系数是利用了整个误差矩阵的信息,它通常被认为能够更准确地反映整体的分类精度。其中,Kappa系数的具体评价标准可以分为5个等级,如表1 所示。

表1 Kappa系数评价标准表
3.2 评价结果
通过过验证标注得出道路目标提取区域的矢量文件。并将此矢量文件与提取的结果进行叠加验证,得出此区域道路网目标提取的误差矩阵评价,具体评价结果如表2 所示。
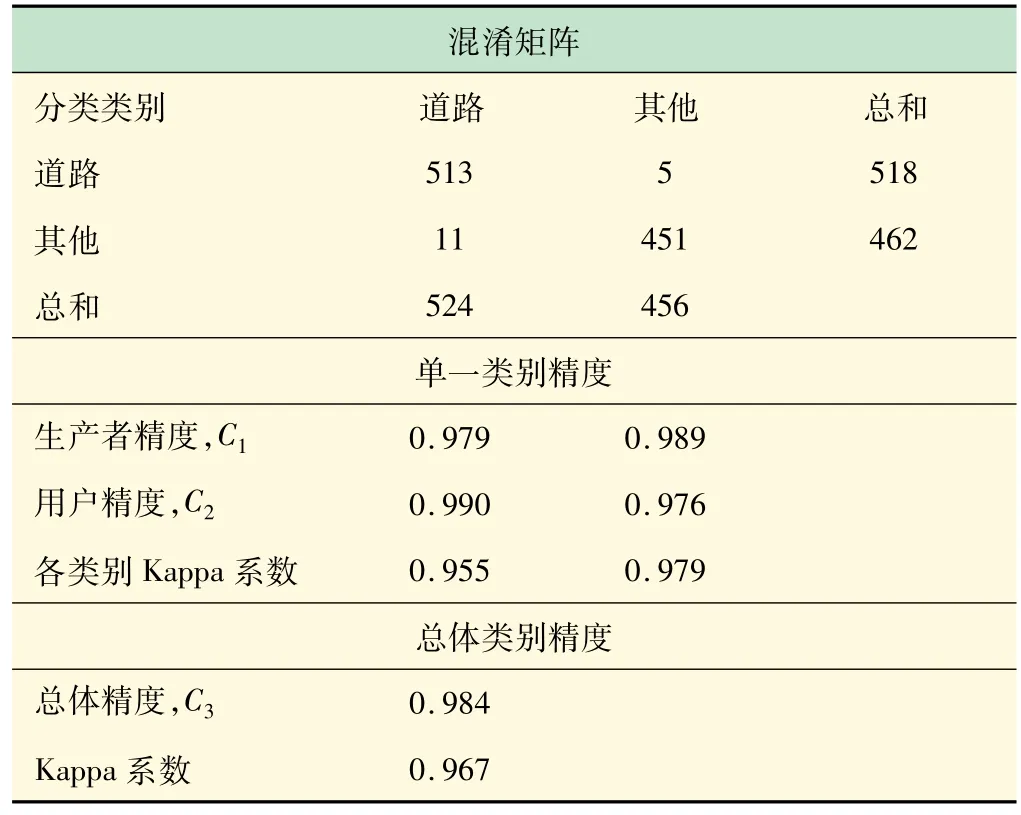
表2 误差矩阵评价结果
误差矩阵的评价结果主要由混淆矩阵评价、单一类别精度评价和总体类别精度评价三部分组成。实验区域的误差矩阵提取结果显示提取的总体精度都达到了0.95以上,道路单一类别的提取精度也在0.95 以上;Kappa系数达到了0.967,由Kappa系数值对应的评价结果标准(见表1)可以看出,道路提取的效果良好。
4 结 语
本文将多种图像处理算法进行融合,设计了一整套针对卫星遥感影像的道路网自动提取流程。将提出的方法应用于原始遥感影像案例验证,并准确地提取出道路网拓扑信息,结果表明:提取的总体精度达到0.95以上;Kappa系数达到了0.967。从而证明了本文的方法有效性。下一步的研究可以在道路网拓扑结构提取的基础上,进行道路的长度、宽度等信息的提取。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
太空探索(2016年5期)2016-07-12
中国工程咨询(2015年5期)2015-02-16
影像技术(2015年4期)2015-02-11
时代英语·高三(2014年5期)2014-08-26
电视技术(2014年19期)2014-03-11
计算机工程(2014年6期)2014-02-28