
塔式起重机安全监控系统设计要点分析
2023-11-09 12:01周洪陈强
工程建设与设计 2023年20期
周洪,陈强
(重庆中建机械制造有限公司,重庆 401325)
1 引言
目前,塔机在智能监控、安全预警、智能化管理方面存在不足,使相关机械设备使用中安全隐患较大。在此背景下,利用最新技术手段做好塔机的安全监控十分重要。本文选取安全监控系统设计作为研究出发点,分析塔机安全监控相关问题并论述系统设计要点,以满足安全管理需求。
2 塔式起重机安全监控系统设计方案
该系统由远程端和塔机端组成,二者均搭载无线传输模块。远程端又分为服务器和客户端两部分,其中,客户端可经由端口接收模块对塔机状态参数进行实时传递,并经由上位机软件监控塔机。塔机端可以拆分成采集系统和主控系统,采集系统负责采集并存储运行参数,确保各项参数均能经由CAN 总线到达主控系统,由主控系统根据所获得参数判断塔机是否存在安全隐患并发布相应指令,与此同时,将各项参数展示在显示屏上[1]。由此可见,对该系统而言,上位机及下位机的操作存在明显区别。
1)上位机功能为:基于服务云端打造通信链路,确保塔机回转角度、高度及其他运行参数均能经由显示屏得到实时展示,一旦出现参数超限情况,监控中心、塔机端将同步发出预警,随后由监控中心发布相应指令,从而达到对塔机端运行状态加以控制的目的。
2)下位机功能为:采集、分析并存储运行参数;经由CAN模块控制参数的传递;显示参数分析结果,视情况决定是否发布预警;为传输模块、存储模块及主控系统提供稳定、高效的通信路径。
3 塔式起重机安全监控系统设计要点
3.1 系统架构
3.1.1 感知层
该层可以拆分为监控对象、监控终端和传感器3 部分,强调以倾角、风速及高度传感器为依托,实时获取塔机运行参数,由监控终端负责放大、调整或转换采集所得参数,为后续分析、处理参数的操作提供便利。工作人员可根据处理结果判断塔机运行的安全性,同时监控终端可以借助图形与数字相结合的方式,将塔机状态展示在显示屏上,确保工作人员能够实时了解塔机情况并做出相应决策,使塔机稳定、高效运行。
3.1.2 网络层
该层主要负责连接感知,感知层经由网络层将传感器所采集参数同步至用户平台和服务器,并对服务器所发布指令进行接收。现有参数传递模式主要分为无线与有线传递,由于塔机高度较高以及施工区域往往存在大量障碍物,有线传递的成本及效果均难以保证,故决定选用无线传递模式,通过5G+LoRa 方式,使参数得到快速且准确的传递[2]。
3.1.3 应用层
该层的服务对象为监控人员,可根据服务需求、功能需求,为工作人员提供相应平台,通过建立运算模型,使塔机获得精确管理。该层可细分为应用服务层、支撑层。
1)服务层为人机交互接口,主要负责为工作人员提供其所需的报警管理、实时监测和参数分析等服务,保证工作人员能及时了解塔机状态,解决潜在问题,使监控效率及整体水平达到预期。
2)支撑层可经由防火墙、应用接口及参数库处理并存储网络层所提供参数,防火墙负责保证系统安全运行,应用接口负责为客户端、服务器提供交互渠道,参数库负责存储各项参数。
3.2 软件设计
系统软件设计方案有两种:裸机系统与多任务系统。
1)裸机系统又包括前后台和轮询系统两种。轮询系统强调先对软件运行所需件进行初始化,再通过无限循环方式对函数进行调用,使系统发挥应有作用,若任务顺序固定,则可使用该系统加以管理,如存在紧急事件,该系统将难以发挥应有作用。
2)多任务系统搭载中断机制,能降低事件丢失或类似问题的发生率,使程序更具实效性。需注意,若软件规模相对较大,即便引入多任务系统,仍然无法获得符合预期的时效性。系统以重要等级为依据,对各项任务进行调度与管理,通过中断完成事件响应,在任务中处理事件。
考虑到实际运行期间,监控中心需要同时监控多台塔机,对参数存储、无线通信等环节要求较高,故决定使用多任务系统,要求设计人员先编写终端软件,再以安全监控需求为依据划分任务,根据不同任务特点分别配置相应硬件,待创建任务环节告一段落,该系统即可正式投入运行。
3.3 硬件设计
3.3.1 控制器
系统选用dsPIC30F 控制器搭载CAN 模块1 个、中断源3个、转换通道6 个、电平变化输入8 个、引脚28 个,其优点主要体现在:外围设备选择多,可以快速中断处理;能准确、高效地完成计算、吞吐参数等操作;响应速度高达30MIPS 左右[3]。
3.3.2 采集模块
1)采集电流信号。起重量限制器为轴销传感器,其性能参数如下:精度等级为0.05;绝缘电阻≥5 000 MΩ;输入电阻值、输出阻抗值为750 Ω;防护等级不低于IP66;拱桥电压≤24 V;灵敏度可达1 mV/V。研究发现,传感器所发出信号多为4~20 mA,通常先将模拟信号转换为电压信号,再对其进行分压处理,最后将经过转换、分压的信号传递至转换口。
2)采集电压信号。采集传感器选用DXZ 行程限位器,该限位器可以拆分成电位器、控制机构和减速器等部分,用于机械信号、电气信号的采集,通过向传感器施加电压的方式,促使限位器匀速旋转,确保传感器电压发生变化,由此达到对塔机回转角度、幅值和高度进行实时监控的目的。具体性能参数如下:精度等级为0.05;防护等级在IP66 或以上;绝缘电阻值为750 Ω;拱桥电压≤15 V;灵敏度达1 mV/V;模拟信号输出值处于0~9 V[4]。
3.3.3 传输模块
为保证塔机运行参数可以实时传递至监控中心,技术人员决定分别在监控中心、塔机内部增设传输设备(见图1),使监控终端、塔机终端多对一或一对一传递参数的设想成为可能。如果监控中心需要同时监控多台塔机,应通过多对一的方式传递参数,其中,监控中心、各塔机内部均应安装传输设备,监控终端可对塔机参数进行实时接收,同时经由云平台发布指令,达到控制塔机运行的目的。一对一传递则需要分别在监控终端、塔机内部增设塔石设备,由塔石设备负责传递参数。系统所搭载传输设备型号为TAS-LTS-363,该设备具有硬件接口简单的优点,仅需依托软件完成串口通信相关操作,便能及时、准确传递参数。

图1 传输设备
3.3.4 通信模块
采集模块负责将运行参数同步至控制器,同时对主控系统所发布指令进行接收,需要具备良好的可扩展性、实时性及可靠性,确保即使某采集模块被破坏,其他节点仍然能维持正常运行。考虑到现有通信模块中CAN 通信在抗干扰能力、传递时效性等方面的表现最为突出,加之该模块可以通过屏蔽、过滤方式,对报文进行选择性接收,故决定将该模块用于安全监控系统,通过增设过滤接收器、屏蔽寄存器的方式,保证采集、传递参数等环节互不影响(见表1)。
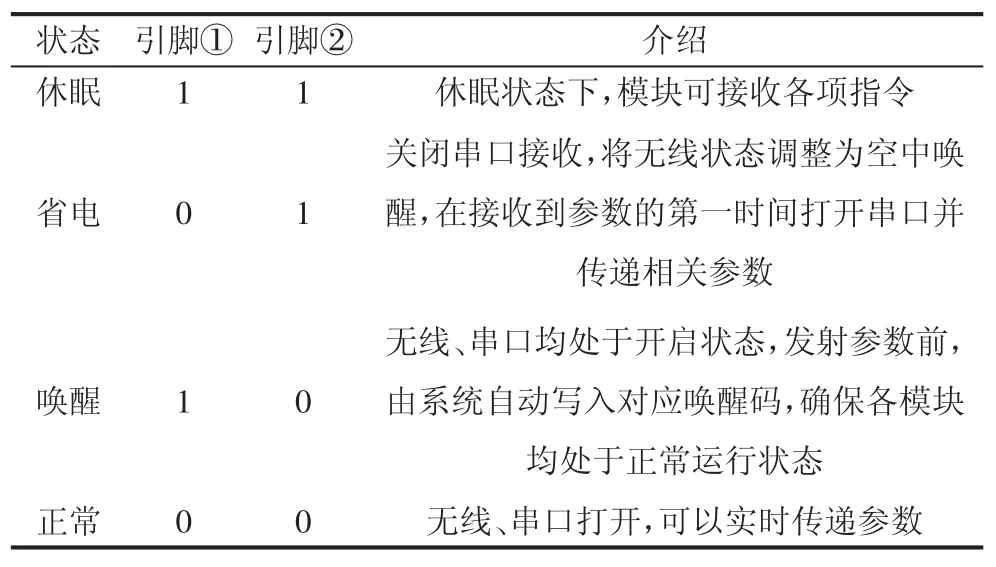
表1 通信模块运行状态
3.3.5 存储模块
存储模块为串口记录仪(见图2),塔机运行参数可经由控制器到达总线,控制器负责将所接收参数同步至串口记录仪,确保各项参数均能够得到及时且准确的存储。串口记录仪的优点在于接口电路简单,通常仅需将其端口与控制器端口相连,便可直接投入使用,并通过串口通信的方式,接收并存储参数、各项指令。存储参数时,引脚端口处于高电平状态,此时,主控系统可直接经由串口传递参数,由处于传递状态的记录仪自动接收并存储参数。存储指令时,引脚端口处于低电平状态,设备运行模式由参数传递变更为指令操作,先由主控系统发布相应命令字,确保命令字能准确传递至记录仪,再由记录仪接收、存储并执行指令。
图2 串口记录仪
3.3.6 预警模块
如果塔机运行参数达到预警值,应亮红灯并发出预警。如若运行参数持续加大,则应终止设备运行,此时,由主控I/O 口发布指令,指令经由驱动电路到达继电器,继电器根据指令切换运行状态,通过更改电气线路运行状态终止设备运行,为塔机安全提供保护。
4 结语
本文分析的设计系统为主从分布系统,仅需将采集系统与CAN 总线相连,便能对塔机运行参数进行实时采集。其优势包括:缩短系统和传感器之间的距离,使外界因素对系统造成的影响降至最低;不需调用主控芯片所搭载硬件资源;扩展难度小,性能可靠且具有良好的时效性。此外,该系统还对参数存储方式进行了创新,在无线传输模块的配合下,使远程监控塔机的设想成为现实。未来,有关人员应从存储时间、采集精度和历史溯源性等角度出发,对该系统进行优化,由此保证最大化地实现其价值。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30
装备制造技术(2020年11期)2021-01-26
发明与创新·小学生(2019年5期)2019-06-14
成都信息工程大学学报(2018年4期)2019-01-23
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
制造技术与机床(2017年10期)2017-11-28
通信电源技术(2016年5期)2016-03-22
地矿测绘(2015年3期)2015-12-22
电子设计工程(2015年6期)2015-02-27
