
基于机载LiDAR 点云数据的电力线自动提取方法与研究
2023-11-06 06:57曹中森
经纬天地 2023年4期
曹中森
(福建永福电力设计股份有限公司,福建福州 350108)
0 引言
为了应对严峻的环境压力以及化石能源的枯竭危机,能源行业正在世界范围内共同推进能源互联网这一新型能源系统,目标以智能电网为骨架,综合电、气、热等多种能源形式,大幅提升能源系统对可再生能源的消纳能力[1]。作为能源物联网骨架的电网规模也在不断扩大。电力线可以将电能从发、变电站输送至各地,因此电力线的定期巡检对于电力系统的高效正常运行具有重要意义。目前,国内外针对电力线巡检的方式主要包括传统人工巡检、无人机巡检、卫星巡检、机器人巡检以及直升机巡检这5 种方式[2-3]。随着无人机以及激光雷达技术软硬件设备的发展,基于无人机载LiDAR 技术的电力线巡检的应用较为广泛,同时,基于无人机载LiDAR 技术扫描点云数据的电力线提取也成了电力线巡检中的研究热点。
目前,基于机载LiDAR 扫描点云数据的电力线提取仍然存在一些不足,如自动化程度不高、人工工作量大、提取结果精度低等。在基于机载LiDAR点云的电力线提取方面,刘晓磊等提出一种种子点跟踪算法进行电力线提取[4],该算法的缺陷在于需要人工进行种子点选取;时磊等提出一种分段投影聚类方法[5],该方法提取电力线精度较高,但是该方法的处理步骤较为复杂;尹辉增等对局部范围内点云的高程直方图分布进行分析[6],实现电力线与其他地物的分类,但是该方法容易将电力线点与铁塔点混淆,并且提取效果受区域大小影响较大;叶岚等提出了基于高程阈值的电力线提取方法[7],但是该方法对于地势平坦地区的电力线提取效果较好,不适用于地势复杂区域的电力线提取。综上所述,现有的电力线提取方法在提取精度、提取效率上均有较大的提升空间。
基于此,本文通过充分分析电力线在机载LiDAR 点云中的分布特征,提出了一种电力线提取方法。该方法主要包括2 个部分,分别为地物分割以及电力线自动检测。首先,通过改进形态学滤波算法以及基于高差阈值实现电力线点以及少量铁塔点的提取,其次,通过双重K-means 算法以及RANSAC 算法实现电力线的自动提取与建模。通过实测机载LiDAR 点云数据对本文提出的电力线提取方法进行检验。
1 机载LiDAR 点云电力线自动提取方法
1.1 电力线提取流程
为了更加高效、精确地从机载LiDAR 点云数据中提取电线点云,首先应分析电力线点云在机载LiDAR 点云数据中的分布特征,主要分布特征包括:1)电力线的高程变化幅度较其他地物的更小;2)相较于其他地物,电力线的高程更大,距离地面点距离更长;3)电力线的水平投影为多条相互平行的直线,在走向上类似抛物线[8-9]。针对电力线的上述特征,本文提出了一种基于机载LiDAR 点云的电力线提取方法,技术路线如图1 所示。
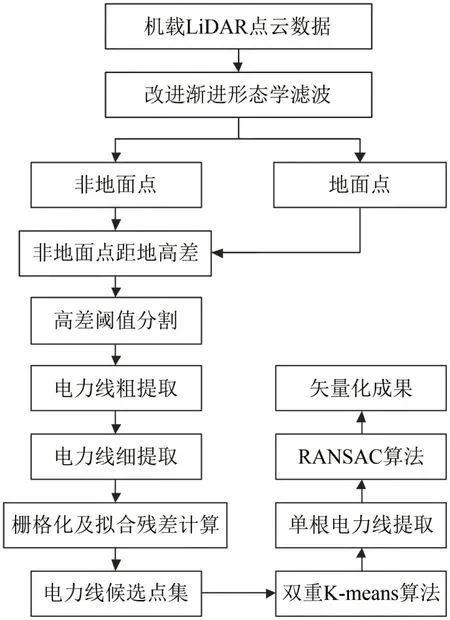
图1 电力线提取技术路线
1.2 地物点去除
通常情况下会存在电力线点与其他地物点相重叠的现象,而传统高差阈值分割方法采用整体平均高差进行分割阈值的确定,因此该类方法在针对复杂地形时可能会导致电力线过分割。本文在高差阈值的基础上提出一种新的分割方法,主要步骤为:
1)地面点获取。渐进形态学滤波算法能够对点云进行简单高效地处理,受地形条件影响较低,但是该算法在进行点云平面投影时,存在将电力线点投影至地面点格网内的情况,造成电力线点误判。本文在传统渐进形态学滤波算法的基础上引入坡度阈值思想,将格网内最低点作为参考点,计算格网内其他点与参考点之间的坡度,将坡度值小于阈值的点作为地面点。参考点与其他点之间坡度计算式如式(1)所示:
式中:(xmin,ymin,zmin)为格网内最低点;(x,y,z)为格网内其他点。
2)计算各点距地高差。将高程最小地面点作为参考地面点,计算格网内所有点距离参考地面点之间的高差,如果该格网内没有地面点,将该格网最近格网的参考地面点作为该格网参考地面点。
3)通过不断迭代确定高差阈值,将高差小于高差阈值的点剔除,包括植被点、房屋点以及大部分铁塔点。计算格网内所有点的距地高差,根据高差平均值z将点云划分为2 个部分,计算2 个部分的距地高差z1与z2,将z1与z2的平均值作为新的z,迭代上述步骤直到z收敛即可得到最佳高差阈值,将高于高差阈值的点集作为电力线点所在点集。
1.3 电力线候选点集自动提取
作为单根电力线提取前的重要环节,电力线候选点集的提取直接关系到单根电力线提取的效率与精度。本文在高差阈值分割的基础上提出了一种基于栅格化密度阈值以及拟合残差阈值的电力线候选点集提取算法,主要步骤为:
1)确定输入点云的边界值以及分布空间S0,如(2)所示:
式中:(x,y,z)为输入点云数据任意一点坐标。
2)根据输入点云数据的质量与尺度确定栅格化尺度以及分布空间S0,并将原始点云数据沿X轴、Z轴方向划分m×n个子空间,如式(3)所示:
式中:dx、dz为栅格化尺度;[x]为求取不大于该x值的最大整数。
3)使用Si,j表示子空间,子空间内点云数量表示为Ni,j,计算某子空间点云数量Ni,j与邻域8 个子空间及该子空间内点云数量总和的比值pi,j,如式(4)所示:
式中:子空间Si,j的特征值可以用Ni,j以及pi,j进行表示。
4)设置阈值dN以及dp,若某子空间特征值同时满足Ni,j≤dN、pi,j≥dp,将该子空间定为1 类子空间,否则为2 类子空间。此时,2 类子空间内点云为铁塔点云,1 类子空间内点云为电力线点云与更少量的铁塔点云。
5)通过抛物线模型以及直线模型的组合对1类子空间点云进行曲线拟合,计算点的拟合残差,如式(5)所示:
式中:vx为X方向拟合残差分量;vz为Z方向拟合残差分量。
6)设置临界阈值dv,通过对比拟合残差与临界阈值dv的大小对1 类空间点进行分类,若某点拟合残差满足v>dv,表示该点为铁塔点,否则为电力线候选点,dv的表达式如式(6)所示:
式中:mv为拟合残差平均值;l为标准差系数;sv为拟合残差的标准差。
1.4 电力线提取
结构上,电力线可分为分裂导线与单根导线,空间特征上,各电力线相互平行。本文根据电力线的空间分布特征,引入双重K-means 算法[10]进行电力线自动提取,该算法实现电力线提取的主要步骤为:
1)通过直线与抛物线组合模型对电力线候选点进行拟合并计算出拟合残差值v;
2)使用K-means 算法对电力线候选点拟合残差进行聚类,算法参数包括种子点间距D以及聚类数目K等;
3)随机选择K个种子点并进行迭代,当种子点集合不再发生变化时即可实现单根电力线点云的提取。
对提取得到的单根电力线点云使用RANSAC算法进行矢量化处理,该算法使用随机选取数据进行模型拟合参数的初选取,通过反复迭代获取最优模型拟合参数。
2 实验与结果分析
2.1 实验数据
为了对本文所提电力线提取方法的有效性进行检验,选择福建北电南送特高压交流输变电工程中实测的部分机载LiDAR 点云数据作为实验数据进行相关实验,工程主要使用Eclipse 机载LiDAR扫描系统进行扫描工作。本文实验数据共包括6个铁塔、28 根电力线,如图2 所示。
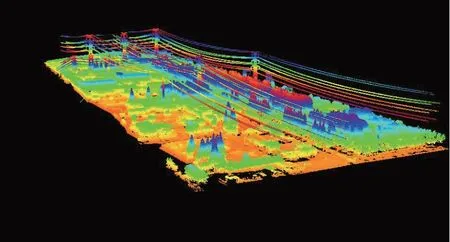
图2 原始点云数据
2.2 实验结果与分析
首先使用高程阈值分割法进行电力线粗提取,算法中涉及的参数包括坡度阈值、高差阈值,通过实验以及迭代计算将坡度阈值设置为1°,高差阈值为24.8 m。基于高程阈值分割算法的电力线点以及少量铁塔点提取结果如图3 所示。可以看到,原始点云中的植被点、建筑物点以及大部分铁塔点被滤除,没有出现电力线过分割的情况。
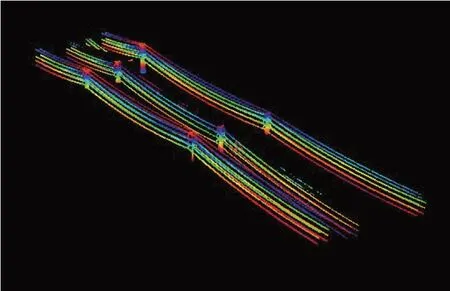
图3 高差阈值分割提取结果
将提取的电力线与少部分铁塔点云作为输入数据,使用基于栅格化密度阈值与拟合残差阈值方法进行电力线候选点云的自动提取,综合考虑该实验数据的特征,将栅格化密度阈值算法中的栅格化尺度dx与dz均取5 m;拟合残差阈值算法中的临界阈值dN、dp分别取280 以及0.4、标准差系数l 取2.3,最终提取的电力线候选点集结果如图4 所示。
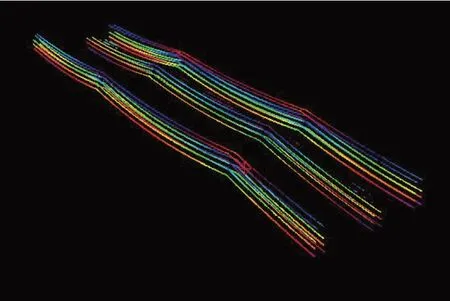
图4 电力线候选点集最终提取结果
为了定量分析本文算法提取电力线提取精度,将本文方法电力线候选点集结果与传统方法电力线候选点集提取结果进行对比,其中将人工提取电力线候选点集作为正确结果,2 种方法提取结果统计如表1 所示。

表1 电力线提取结果表
通过表1 可知:本文提出的电力线提取结果较传统电力线提取结果的正确率更高,达到了98%以上,同时可以看到2 种方法提取电力线点云数均大于人工提取点云数,原因在于电力线附近存在与电力线点云空间分布特征相似的噪声点,在后续使用双重K-means 算法进行电力线点云聚类时将该类噪声点剔除。
将提取电力线候选点集作为输入数据,使用双重K-means 进行电力线提取,并使用RANSAC 算法进行矢量化处理,处理结果如图5 所示。可以看到,使用双重K-means 算法以及RANSAC 算法能够准确进行单根电力线的提取与重建。实验结果验证了本文提出电力线提取与重建的可行性,具有较高的正确性。

图5 电力线提取与矢量化结果
3 结语
本文根据机载LiDAR 点云中电力线点云数据的空间分布特征,提出并实现了一整套电力线提取方法。该方法实现电力线提取的流程主要有:首先,使用高差阈值算法实现电力线点以及部分铁塔点的粗提取,该算法克服了传统方法在提取电力线点时将地物点误分为电力线点的不足;其次,基于栅格化密度阈值以及拟合残差阈值的算法提取得到电力线候选点集。
最后,使用双重K-means 算法实现单根电力线的提取并根据RANSAC 算法对提取结果进行矢量化处理。通过实测机载LiDAR 点云数据对本文提出方法进行检验,实验结果表明:本文方法较传统方法提取电力线结果正确性更高,在实际项目工程中的应用价值高。
猜你喜欢
煤气与热力(2021年10期)2021-12-02
空间科学学报(2020年6期)2020-07-21
装饰装修天地(2020年11期)2020-07-04
铁道勘察(2018年5期)2018-10-22
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
江西理工大学学报(2015年3期)2015-12-22
房地产导刊(2015年6期)2015-10-21
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年20期)2014-04-04
