
Attention mechanism based multi-scale feature extraction of bearing fault diagnosis
2023-11-06 14:20:00LEIXueLUNingyunCHENChuangHUTianzhenandJIANGBin
LEI Xue ,LU Ningyun,2,* ,CHEN Chuang,3 ,HU Tianzhen ,and JIANG Bin,2
1.College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China;2.State Key Laboratory of Mechanics and Control of Mechanical Structures,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China;3.College of Electrical Engineering and Control Science,Nanjing Tech University,Nanjing 211816,China
Abstract: Effective bearing fault diagnosis is vital for the safe and reliable operation of rotating machinery.In practical applications,bearings often work at various rotational speeds as well as load conditions.Yet,the bearing fault diagnosis under multiple conditions is a new subject,which needs to be further explored.Therefore,a multi-scale deep belief network (DBN) method integrated with attention mechanism is proposed for the purpose of extracting the multi-scale core features from vibration signals,containing four primary steps: preprocessing of multi-scale data,feature extraction,feature fusion,and fault classification.The key novelties include multi-scale feature extraction using multiscale DBN algorithm,and feature fusion using attention mechanism.The benchmark dataset from University of Ottawa is applied to validate the effectiveness as well as advantages of this method.Furthermore,the aforementioned method is compared with four classical fault diagnosis methods reported in the literature,and the comparison results show that our proposed method has higher diagnostic accuracy and better robustness.
Keywords: bearing fault diagnosis,multiple conditions,attention mechanism,multi-scale data,deep belief network (DBN).
1.Introduction
Bearing is one of the most critical components in rotating machines.Nearly 40% to 50% of all rotating machinery failures are in connection with bearing faults [1].Accurate diagnosis and prognosis of rotating machinery is vital for maintaining the safe and reliable operation of rotating machinery.The fault diagnosis of bearings under constant operating conditions has been extensively studied [2].However,in practice,bearings often run under multiple conditions along with different rotational speeds and external loads.Bearings running under multiple conditions are prone to various failures.Therefore,there is an urgent need for reliable multi-working condition diagnosis methods,however,there is little in-depth research on bearing fault diagnosis under multi-working conditions [2].
With the massive data collected in many systems,datadriven fault diagnosis methods are faced with the challenges of big data processing and complex working conditions.Different from the shallow neural network methods,deep learning methods have remarkable ability to process a vast amount of data,which are attracting more and more attention.
In recent years,great progress has been made in fault diagnosis using deep learning methods [3-11].For instance,some interesting results based on vibration signal processing using deep learning methods have been reported in [12-21].Deep belief network (DBN) [22] as a widely used deep learning technique [23-25],can unify feature extraction,feature reduction as well as pattern recognition.In addition,it is able to extract representative information and sensitive features automatically.In the context of massive data,DBN is a proper algorithm for bearing fault diagnosis.
As discussed previously,bearings often run under multiple conditions,with their signals being unstationary.If the deep learning algorithm is used for blind training of vibration signals collected from different conditions,the obtained features may have serious divergences even for the same fault type [2].Such divergence leads to the fact that those bearing fault diagnosis methods developed for constant running conditions are unsuitable for multi-condition cases.Thus,it is the primary requirement for successful data-driven bearing diagnosis methods under various conditions to obtain comprehensive intrinsic characteristics.Many researchers have been committed to fault diagnosis using multi-scale method,and have achieved some positive results [26-28].Obviously,vibration signals at different scales can provide diversified information.Using a multi-scale resampling technique,different features of vibration signals at different scales can be obtained.Nevertheless,the features at different scales often have different contributions to bearing fault diagnosis.It is important to eliminate redundant features to enhance the performance of fault diagnosis.The attention mechanism will be adopted for such a purpose.
The attention mechanism [27-29] has been successfully applied to different research tasks.The main advantage lies in that it can highlight the pivotal features.Inspired by this idea,numerous researchers have begun to apply the attention mechanism to fault diagnosis to obtain favorable performance.In [29],an attention mechanism was introduced into fault diagnosis in an efficient way.
In this regard,in this paper,a multi-scale DBN model based on attention mechanism is proposed,which can be used for fault diagnosis of bearings under multiple conditions.Firstly,the vibration signals are processed to obtain different scales.Then,multi-scale features are extracted by DBN.Next,the combined scales with the highest diagnostic reliability are selected.On the basis of the principle of attention mechanism,the contributions of different scale features are calculated to assign the scale weights.Based on the weighted features,multi-scale features are fused for fault diagnosis.
The rest of this paper is described below.The basic theory of the proposed method is introduced in Section 2.Section 3 describes the multi-scale DBN model integrated with attention mechanism.In Section 4,a benchmark dataset for bearing fault diagnosis under multiple conditions is used to validate the effectiveness of the proposed method.Moreover,some comparative results with other fault diagnosis methods are provided.Finally,Section 5 summarizes this paper.
2.Basic theory
2.1 Multi-scale data processing
Bearings often work at different rotational speeds and load conditions.In this paper,the bearing fault under multiple conditions is mainly considered,in which the vibration signals of bearing failure will be more complicated.The multi-scale vibration signals can be obtained by down-sampling frequency.
As is known to all,the micro-scale data can reflect the detailed characteristics,while the large-scale data can describe the global characteristics.In general,the macroscale characteristics are able to provide more comprehensive information for fault diagnosis.
SetX={x1,x2,···,xn,···,xN} as the input of multiscale data input layer,whereNdenotes the initial length of the vibration signals data,xnis thenth value of the sampling point of the original vibration signal.Thus,the corresponding data length is.As illustrated in Fig.1,the data form with different scale numbers (s=1,2,3).
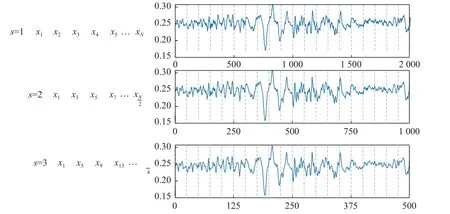
Fig.1 Structure of multi-scale DBN method based on attention mechanism
Due to the limitations described in Section 1,the final scale number is not arbitrarily given.The larger the number of the scales,the longer the training time.To ensure the timeliness of fault diagnosis,it is necessary to predetermine the number of scales,which will be discussed in detail in Section 4.
2.2 DBN
DBN generally consists of multiple restricted Boltzmann machine (RBM) [22].Each RBM is composed of a visual layer and a hidden layer.Fig.2 shows the structure of DBN.The feature extraction for fault diagnosis is realized through the iteration of RBM and fine-tuning using the backpropagation (BP) neural network.In order to solve the training problems of DBN,connection weights of networks are optimized through layer by layer greedy learning.
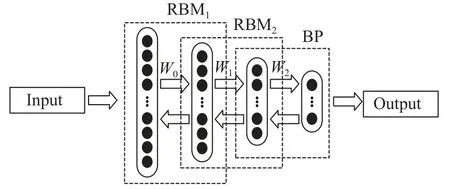
Fig.2 DBN structure
2.3 Attention mechanism
To enhance the fault diagnosis performance,the attention mechanism is applied to DBN,concentrating on the characteristics that have a great impact on fault diagnosis.Fig.3 shows the structure of attention mechanism.On the basis of attention mechanism,this paper adopts the strategy of “feature recalibration” [30].According to the contribution of each channel to the fault diagnosis,the attention mechanism assigns different weights to the final outputs of the hidden layer of each channel.
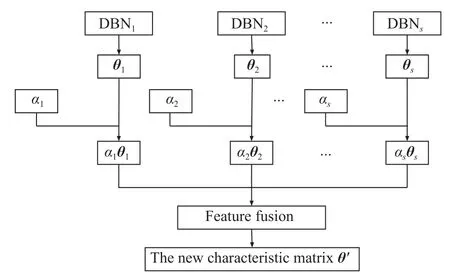
Fig.3 Feature fusion process of attention mechanism
Different scale features extracted from each channel exert different influence on the fault diagnosis results.The key is how to assign weights to different scale features.
Setθ1,θ2,···,θi,···,θsto be the output matrix of hidden layer for theith scale (i=1,2,···,s),and there arekhidden layer output nodes.Then,θican be given by
On the other hand,the average accuracy rate of fault diagnosis in each scale can be regarded as confidence level (noted ase1,e2,···,ei(i=1,2,···,s)).Thus,the weight of each channel can be determined by
Ultimately,the new characteristic matrixθ'can be updated by
3.Multi-scale DBN model integrated with attention mechanism
The diagnosis flow of the proposed multi-scale DBN method integrated with attention mechanism is shown in Fig.4,which consists of four modules:
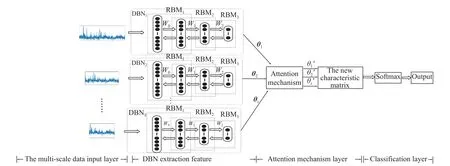
Fig.4 Diagnosis flow of multi-scale DBN method based on attention mechanism
(i) The multi-scale data input layer,which is used for receiving the vibration signals in different scales;
(ii) The multi-scale feature extraction layer,which aims to extract the features of each scale;
(iii) The attention mechanism layer,which is applied to obtain multi-scale features using the attention mechanism;
(iv) The diagnosis results output layer,which utilizes the fused multi-scale features to achieve fault classification.
The multi-scale vibration data are input to the DBN,and the process of training the data of each scale is called a channel.Different from single-scale DBN training,after multi-scale DBN iteration,the hidden layer output characteristics of each channel are included in the attention mechanism.The details of attention mechanism are discussed in Subsection 2.3.
As shown in Fig.3,every scale has a channel,and DBN is used for feature extraction.The weights are assigned according to aforementioned principles,and a new characteristic matrixθ'is obtained.
With the obtained fused multi-scale features,a “softmax” activation function,which can generate the conditional probability of each type of output,is employed to realize the multi-class fault classification.
Specifically,as shown in Fig.5,the fault diagnosis process based on DBN with attention mechanism is described as follows.Firstly,the multi-scale vibration signals are obtained using the multi-scale method.Secondly,the multi-scale features are obtained through multiple RBMs with different channels.Thirdly,the attention mechanism is used to recalibrate the features of different channels.Subsequently,the fault diagnosis is realized by using the “softmax” activation function in the classification layer.It should be pointed out that the proposed multi-scale DBN model with attention mechanism can handle multiple time-varying conditions.Since the multi-scale method can weaken random noise to some certain extent,the influence of noise on fault diagnosis is also considered.
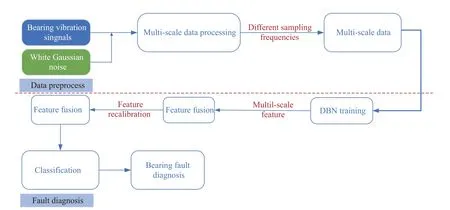
Fig.5 Fault diagnosis process based on DBN with attention mechanism
4.Experimental validation
4.1 Data introduction
In this section,the bearing vibration data under multiple conditions provided by University of Ottawa is applied to verify the performance effectiveness of the proposed method.
Fig.6 demonstrates the experimental platforms.Table 1 introduces the dataset,and four variable speed conditions are used for fault diagnosis,including the increasing speed (marked as IS),decreasing speed(marked as DS),increasing and then decreasing speed conditions (marked as IDS),as well as decreasing and then increasing speed (marked as DIS).In addition,in order to highlight the superiority of this method,the results of diagnosis are compared with four existing fault diagnosis methods.In practice,considering that the vibration signals are polluted by noise,the Gaussian noise is added to the bearing vibration data so as to verify the robustness of this method.

Table 1 Introduction of bearing dataset

Fig.6 Experimental set-up [31]
4.2 Multi-scale data processing
As mentioned earlier,multi-scale data can provide more comprehensive information for fault diagnosis.The multiscale data are obtained by multi-scale processing of vibration signals.Fig.7 illustrates the overall situation of vibration signals after processing six scales.According to Fig.7,the vibration data obtained synchronously have different data lengths due to the reduction of the sampling frequency.Moreover,the vibration signals obtained are different with different sampling frequencies.In this figure,the area around 1 000 000 sampling points of the raw data is marked in red.As the scale increases,it can be seen that the position of the point is changing.The bearing signals from one to three scales are used as the signals,while Fig.8 merely shows the multi-scale process of the first 4 000 samples.
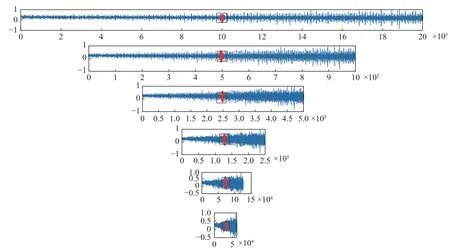
Fig.7 Bearing vibration signals at six scales
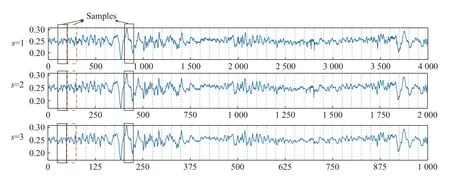
Fig.8 Multi-scale process to the first 4 000 samples
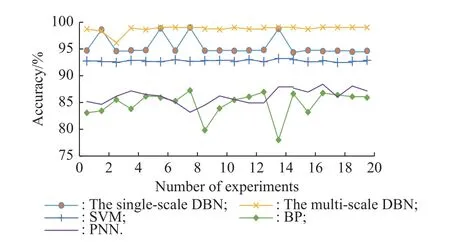
Fig.9 Diagnostic accuracy of two fault diagnosis experiments under increasing speed conditions
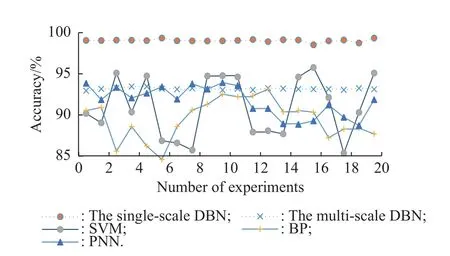
Fig.10 Diagnostic accuracy of fault diagnosis experiments under decreasing speed conditions
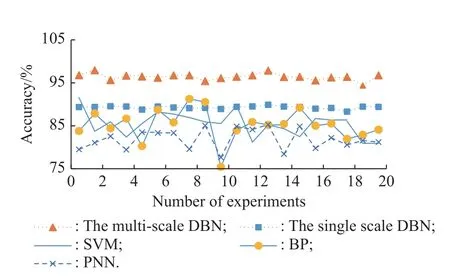
Fig.11 Diagnostic accuracy of fault diagnosis experiments under increasing then decreasing speed conditions
4.3 Scale selection and fault diagnosis results
Information contained in different scales has different contributions to fault diagnosis.There are some invalid scales affecting the timeliness of diagnosis.Therefore,it is necessary to select a reasonable scale for fault diagnosis.In order to select the appropriate scale,fault diagnosis should be carried out on a single-scale,and the scale with good diagnosis should be preferred.Fault diagnosis is conducted on the vibration data of different scales.The accuracy,stability and time of fault diagnosis are taken as the measurement standard.To eliminate random factors,20 trials are collected for each scale.The results of fault diagnosis with scales from 1 to 5 under single time-varying condition (with increasing speed) is shown in Table 2.It can be seen that the accuracy and stability of fault diagnosis have been improved at scale 3.
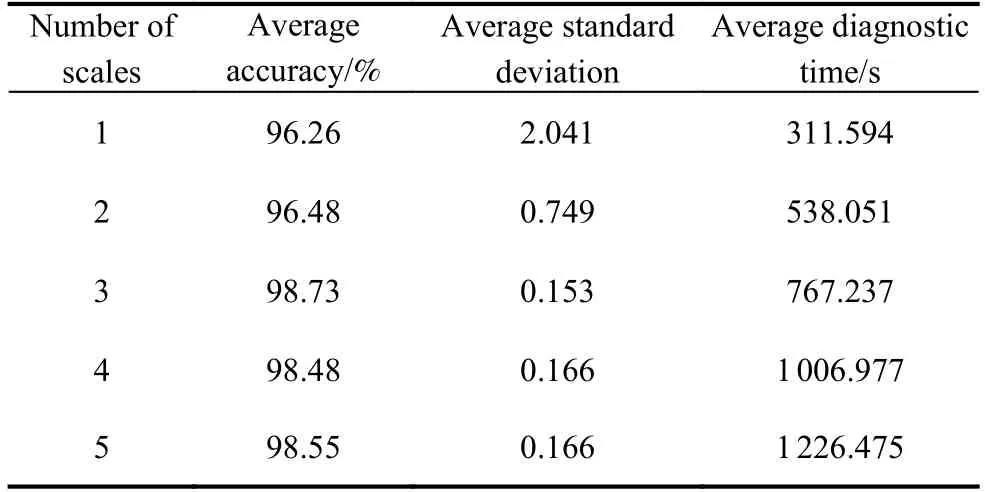
Table 2 Fault diagnosis results at different scales
Compared with the first two scales,the accuracy and stability of diagnosis have not changed significantly with the increase of scales in later stage,but the time required for diagnosis is increasing.Thus,the number of scales is set to 3.
4.4 Comparative experimental results
To highlight the advantages of the proposed method,four other methods (single-scale DBN algorithm,support vector machines (SVM) algorithm,back propagation neural network (BPNN) algorithm and probabilistic neural network (PNN) algorithm for fault diagnosis based on the same datasets) are used for comparisons.The multiple conditions including single time-varying condition and mixed timevarying conditions are taken into consideration.Additionally,the influence of noise on fault diagnosis is considered.
4.4.1 Results of Experiment 1
The bearing vibration data under single time-varying conditions (including the IS condition,DS condition,IDS condition and DIS condition) are used for fault diagnosis.Figs.9-11 list the diagnostic accuracy of 20 experiments of several algorithms under different conditions,respectively.According to Figs.9-11,the average accuracies as well as standard deviations of 20 fault diagnoses under three conditions are listed in Table 3,respectively.
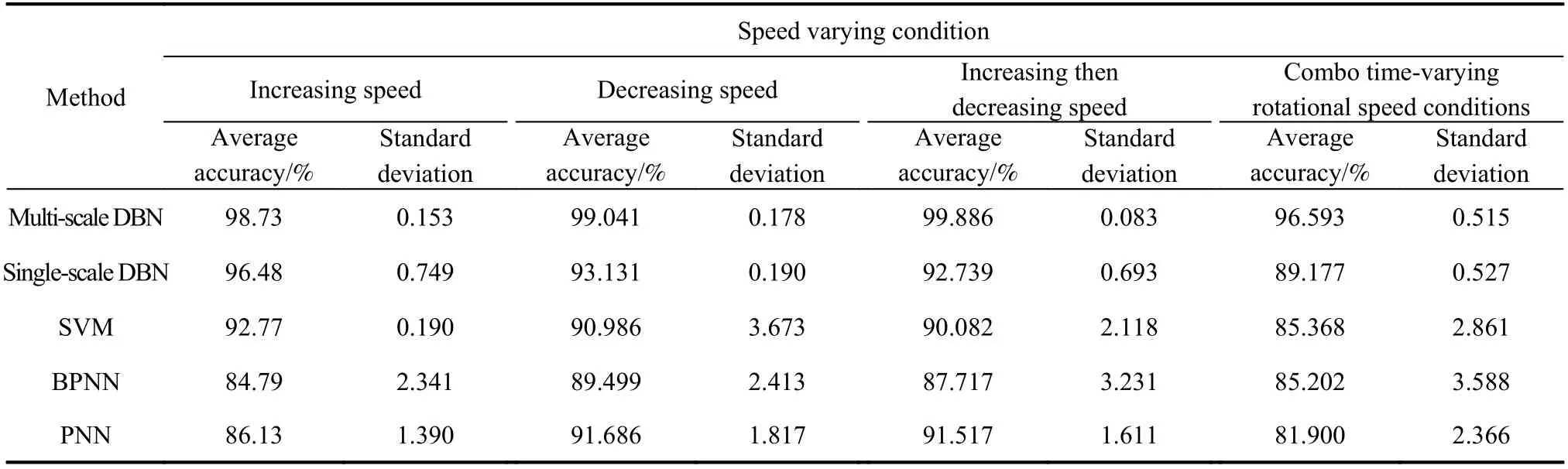
Table 3 Fault diagnosis results
As shown in the figures,compared with the classical four methods,the proposed method has better diagnostic effect and stability.It can be seen from Table 3 that in 20 experiments under different conditions,the average accuracy of this method is higher,and the stability of diagnosis is better in terms of standard deviation.
4.4.2 Results of Experiment 2
Bearing vibration data under combo time-varying conditions (including IS,DS,IDS and DIS conditions) are used for fault diagnosis.The average accuracy and standard deviation of 20 fault diagnoses are listed in Table 3,and the diagnostic accuracy of 20 experiments of several algorithms is shown in Fig.12.
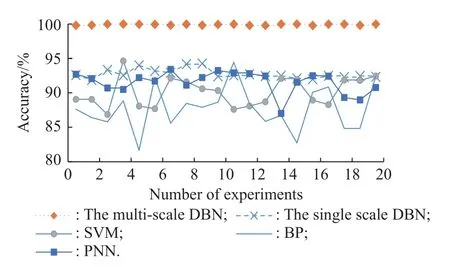
Fig.12 Diagnostic accuracy of fault diagnosis experiments under mixed time-varying rotational speed conditions
As can be seen from Table 3,the average accuracy of the proposed method is higher in 20 experiments under combo time-varying conditions,compared with the other four methods.Moreover,the proposed method has a better performance in diagnostic effects,and the diagnostic results are also stable,as shown in Fig.12.In addition,it can be observed that the accuracy rate of mixed working conditions is less than that of single time-varying rotational speed condition in Fig.13.
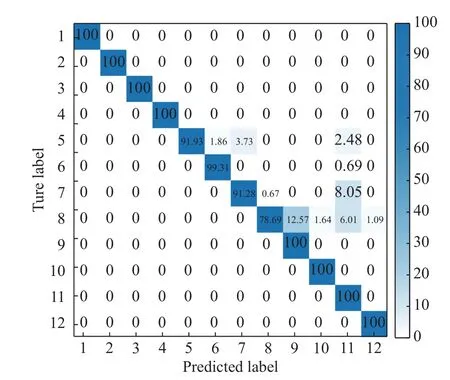
Fig.13 Confusion matrix for fault diagnosis
4.4.3 Results of Experiment 3
The strong noise in the actual environment can easily interfere with the bearing vibration signal.However,the data collected from the experimental platform may be less disturbed by strong noise.The multi-scale processing method is used to filter out high-frequency interference and random noise partly.To verify the robustness of the proposed method,white Gaussian noise is added to the bearing vibration data (under the condition of increasing and then decreasing the speed).The signal to noise ratio (SNR) is expressed as
The vibration signal under time-varying conditions mixed noise of -4 dB to 10 dB is used to verify the robustness of the proposed method.Fig.14 shows the original signal and the vibration signal of 10 dB mixed noise.The single-scale DBN algorithm,the SVM algorithm and the PNN algorithms are utilized to diagnose the faults with the same datasets.The results of fault diagnosis is shown in Fig.15.It can be seen from Fig.15 that the multi-scale method based on attention mechanism has a higher diagnostic accuracy than the single-scale method,the SVM method and the PNN method.Especially,when SNR=4,the obtained accuracy rate is greater than 98%.
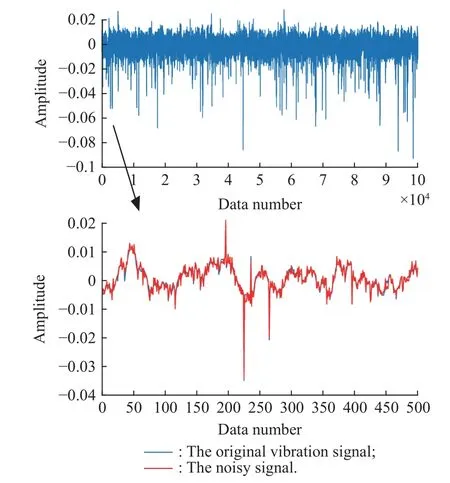
Fig.14 Original signal and vibration signal of 10 dB mixed noise
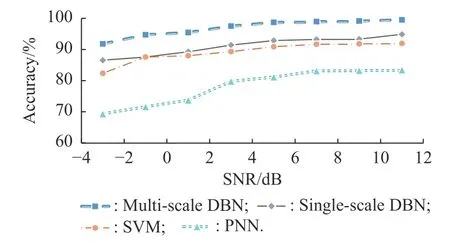
Fig.15 Fault diagnosis results under noise conditions
5.Conclusions
In this study,to develop the bearing fault diagnosis method under multiple conditions,a multi-scale DBN method based on attention mechanism is proposed.The multi-scale vibration signal is obtained by multi-scale method,and multi-scale features are obtained by the multiple RBMs in different channels.The features are recalibrated by using the attention mechanism.At the classification level,the “softmax” activation function is used to realize fault diagnosis.Since the multi-scale method can weaken random noise to a certain extent,the influence of noise on fault diagnosis is also considered.
Experimental results demonstrate that the multi-scale DBN method based on attention mechanism has higher diagnostic accuracy and stability in fault diagnosis under mixed time-varying conditions,compared with singlescale of DBN,SVM and BPNN algorithm.In addition,this proposed method has better diagnostic recognition rates and stronger robustness under different noise conditions.
 Journal of Systems Engineering and Electronics2023年5期
Journal of Systems Engineering and Electronics2023年5期
- Journal of Systems Engineering and Electronics的其它文章
- Reliability analysis for wireless communication networks via dynamic Bayesian network
- LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle
- Anti-interference self-alignment algorithm by attitude optimization estimation for SINS on a rocking base
- TOA positioning algorithm of LBL system for underwater target based on PSO
- Scene image recognition with knowledge transfer for drone navigation
- Leader trajectory planning method considering constraints of formation controller