
Research on agile space emergency launching mission planning simulation and verification method
2023-11-06 14:19:38WUFengLIUXiuluoWANGJiaLIChaoLIUYingSUJianbinZHANGAiliangandWANGMin
WU Feng ,LIU Xiuluo ,WANG Jia ,LI Chao ,LIU Ying ,SU Jianbin ,ZHANG Ailiang,and WANG Min
1.Beijing Institute of Tracking and Telecommunications Technology,Beijing 100094,China;2.CASIC Space Engineering Development Co.Ltd.,Beijing 100854,China
Abstract: Space emergency launching is to send a satellite into space by using a rapid responsive solid rocket in the bounded time to implement the emergency Earth observation mission.The key and difficult points mainly include the business process construction of launching mission planning,validation of the effectiveness of the launching scheme,etc.This paper proposes the agile space emergency launching mission planning simulation and verification method,which systematically constructs the overall technical framework of space emergency launching mission planning with multi-field area,multi-platform and multi-task parallel under the constraint of resource scheduling for the first time.It supports flexible reconstruction of mission planning processes such as launching target planning,trajectory planning,path planning,action planning and launching time analysis,and can realize on-demand assembly of operation links under different mission scenarios and different plan conditions,so as to quickly modify and generate launching schemes.It supports the fast solution of rocket trajectory data and the accurate analysis of multi-point salvo time window recheck and can realize the fast conflict resolution of launching missions in the dimensions of launching position and launching window sequence.It supports lightweight scenario design,modular flexible simulation,based on launching style,launching platform,launching rules,etc.,can realize the independent mapping of mission planning results to two-dimensional and three-dimensional visual simulation models,so as to achieve a smooth connection between mission planning and simulation.
Keywords: emergency launching,launching mission planning,launching process simulation,satellite orbit planning,rocket trajectory planning.
1.Introduction
Space emergency launching mission planning mainly aims at the mission requirements of rapidly constructing local satellite monitoring network by using the emergency launching system.According to the mission requirements of target monitoring area,mission timeliness and revisit cycle,mission parameters such as constellation configuration or satellite orbit,satellite type and payload,rocket launching trajectory,rocket type,launching position,launching window and maneuver route are determined in the planning,so as to meet the requirements of mission implementation.Fast satellite networking usually requires satellites to be sent to different orbital planes or phases at multiple launching positions and different launching platforms with multiple launching batches in a limited time interval.Faced with constraints in terms of time,space,capability,interface and resources,it is urgent to solve the problem of how to quickly carry out multi-field area,multi-platform and multi-mission parallel space emergency launching mission planning and achieve the overall optimization of various resource scheduling and launching timing coordination.
A large number of researches have been carried out on space emergency launching mission planning at home and abroad,mainly focusing on the overall framework and method process design [1,2],model algorithm research [3-6],and simulation platform technology research [7-13].The typical battle simulation system mainly includes extended air defense simulation (EADSIM) [7],flexible analysis modeling and exercise system(FLAMES) [8],joint warfare system (JWARS) [9],joint theater level simulation (JTLS) [10],etc.They are widely used in the battle analysis,battle training,and other fields.There are two main modeling approaches for the deductive and simulation systems.The one is the objectoriented modeling approach,such as EADSIM.The other is the componentized modeling approach,such as FLAMES.In terms of simulation platforms,the typical ones are XSim Studio (XSIM) extensible simulation platform [11] and artificial combat simulation (ACS) simulation platform.All these simulation platforms can be used to model the capability,behavior and state of virtual forces,and realize the battle simulation based on virtual forces.XSIM is mainly used for campaign and tactical level simulation.It provides model design,model assembly,scenario editing,scenario operation,situation display and other development toolsets.It supports highlevel architecture (HLA)/RunTime infrastructure (RTI)[12] and has good flexibility and extensibility.XSIM supports componentization modeling and can schedule event queue according to time queue by the simulation engine to solve the simulation model and realize event promotion.XSIM can be used to develop both analysis and systems and counter training systems.The ACS simulation platform is the platform that fully draws on the technical principles of several system platforms such as EADSIM and FLAMES,and integrates battle,simulation training and equipment demonstration.It has carried out a lot of technological innovations in core engine,functional flexible recombination,model architecture system design,deductive mechanism conforming to actual battle,open and transparent rule data,fine identification of environment of battlefield and other aspects.It provides a unified supporting framework and integrated operating environment,which can be used to develop various application systems in the field of battle simulation according to user requirements.It provides componentized modeling,discrete event simulation,two-dimension (2D) and threedimension (3D) display,analysis and evaluation,largesample simulation and other general technologies,and provides a basic model base,model data and high-precision geographic information data.It can be widely used in the fields of confrontation training,battle plans formulation and improvement,coordinated battle planning,new battle methods research and verification,battle theories research and innovation,as well as weapons and equipment demonstration and system effectiveness evaluation[13].In addition,some research results in other fields also play a good reference value for relevant researches on space emergency launching mission planning.Gu et al.[14-18] carried out research on the technical route for rapid modification of launching scheme to form a formal scheme.Niu et al.[19-30] provided research ideas for reference for maneuver path planning,launching scheme evaluation and rocket trajectory optimization.
Current researches either stay at the conceptual research level and lack in-depth research on the core key models,or focus on the mission planning model algorithm or platform technology of some mission links,without systematically carrying out the overall framework design of the whole elements and the whole process of the mission planning.This paper proposes the agile space emergency launching mission planning simulation and verification method.(i) Taking constellation network design and launching trajectory planning as the main line,the core business functions and key business processes of mission planning have been constructed.At the same time,the modular design of each business function and the configuration of business processes on demand have been realized,so as to improve the elastic reconstruction and operational efficiency of mission planning.Among them,the basic principles of constellation network design include: i) Considering the constraints of multi-star cooperative detection,identification and positioning accuracy,the variation range of satellite orbit parameters will be calculated and analyzed.ii) Considering the launching carrying capacity and on-board orbit transfer capacity,the variation range of the initial orbit parameters of the satellite will be calculated and analyzed.iii) Based on the number of its orbital elements and the type and parameters of its onboard sensors,the coverage of the target area of each satellite will be calculated.iv) Based on typical satellite constellation configurations,constellation design parameters such as orbital plane,phase and number of satellites will be optimized.The basic principles of launching trajectory planning include: i) According to the parameters of each orbit in the constellation and the current mission time,considering the constraints such as solar illumination and launching position,the launching time will be calculated.ii) According to the orbit parameters in the constellation,the trajectory design constraints will be determined to realize the rapid generation of the optimal launching trajectory.iii) According to the parameters of each orbit in the constellation and the launching position and overall parameters of each rocket,the assignment of launching missions will be completed,including the matching between the rocket and the target orbit and the optimization of the launching timing of one rocket and multiple stars.iv) Considering the existing rocket resources and their carrying capacity,the mapping network between the launching window and the optimal launching networking strategy will be built to complete the generation of launching trajectory.(ii) Aiming at the problem of fast trajectory solving,a universal trajectory solving idea with the constrained optimization problem has been proposed,which has a strong ability of searching the minimum value of the total cost function in multidimensional space.By calling SNOPT toolbox,the launching trajectory optimization calculation process is optimized and iterated,and organically integrated with the rocket’s Matlab mathematical model,which could significantly improve the optimization efficiency and meet the needs of rapid trajectory calculation under the condition of finite emergency launching time.Aiming at the collision probability analysis of multi-point salvo,the collision probability problem is transformed into the integration of 2D probability density function (PDF) [31-33]in the circular domain,and the first term of the probability integral is taken as the approximate value of the collision probability to ensure an effective balance between the calculation error and the calculation efficiency.(iii)Through lightweight design,modular model construction[34-36],visual model assembly and flexible simulation,the seamless connection between launching mission planning and launching process simulation can be realized.In accordance with constraints such as launching mode,launching platform and launching rules,the monitoring effect of multiple satellites can be analyzed for target monitoring area.The process of maneuver,launching,orbit entry and evaluation of a single satellite launching can be deduced.It can be re-planned and deduced according to the natural environment and the sudden change of the equipment and facilities.
2.Overall scheme
2.1 Overall architecture
As shown in Fig.1,the overall architecture can be divided into application layer,service layer and resource layer according to the operation support relationship.

Fig.1 Overall architecture
The resource layer includes launching conceptual model,solid rocket model data,launching basic data resources and computing,storage and display resources,etc.,and provides data,software and hardware support for the service layer.The service layer includes basic simulation platform,general service and special service.The general service is the encapsulation and integration service that completes the specific common business.Following the principle of service decoupling and functional integration,the service interface and service communication are used for the invocation of the special service.The special service provides background service support for the application layer.It mainly includes launching style analysis,satellite orbit planning,launching mission marshalling,launching scheme generation,launching scenario editing,launching data management,launching situation display,launching process simulation analysis and other services.The application layer provides launching mission planning and launching process simulation application for users by calling the service layer’s special service.
The overall information processing is divided into three stages: launching scenario,launching planning,launching simulation.In the launching scenario stage,it mainly carries out scenario editing,launching target confirmation and launching scenario editing.The launching planning stage mainly carries out launching style analysis,satellite orbit planning,launching mission marshalling,and launching scheme generation.In the launching simulation stage,it mainly carries out model management,experiment control,launching situation analysis and launching process simulation analysis.Launching scenario outputs scenario data to launching planning and launching planning outputs launching scheme to launching simulation.The overall information interaction is shown in Fig.2.

Fig.2 Overall information interaction
2.2 Technology architecture
As shown in Fig.3 below,the technology framework can be divided into the data layer,the business layer and the display layer.The data layer includes unified data loading,and data consolidation processing.The business layer includes simulating calculation,script edit,script interpreting,resource scheduling analysis,scene generation and algorithm library management.The display layer includes user interface and scene display.Each function module interacts with others by the way of the message queue (MQ).The achievement data in mission planning domain will be consolidated and processed according to the metadata mapping rulers,to get the datasets meeting the planning and requirements.Unified data loading will provide the dataset unified access interface.Simulating calculation will carry out the mission planning computing analysis according to the user’s needs,where the computing part will use the resource scheduling analysis as the support.The simulating calculation results will be regarded as the main data source of scenario scripts.Script edit will provide the visual scenario edit environment to realize the script edit functions for metadata mapping,semantic association and visual process.Script interpreting will mainly parse the visual process script and send the script instructions to scene generation,resource scheduling analysis respectively,to construct visual basis environment,call computing resource for realtime computing and get access to data resource on demand.Scene generation will integrate the compute results and datasets according to the semantic association script under the visual basis environment,to generate visual scenes called by scene display.Resource scheduling analysis will comprehensively use algorithms,data and computing power resource to provide compute support for simulating calculation,and scene generation.

Fig.3 Technology architecture
As shown in Fig.4,all function modules are designed as threads,so the main thread can call the threads of scene management,script management,calculation management and data management by the unified integration framework,to realize interaction control,real-time display,resource scheduling and comprehensive integration.

Fig.4 Multithreaded,modular function design
3.Simulation model construction
3.1 Modularization model construction and integration analysis
All models are divided into three types: platform,weapon and component.Users can attach components to platforms or weapons,to quickly construct complete simulation entity.The model data separation ideal is adopted,thus the model has only operation logic.During instantiation,the rocket engine,guidance and control system,measurement and control system,command and communication system,behavior capability and target characteristics of the equipment entity will be assembled,various kinds of equipment with different capabilities,different uses and different architectures can be formed.The model architecture is provided with system-level scheduling logic,clear interface and convenient development mechanism,so as to develop and integrate the model efficiently.The model assembly tool is constructed with the characteristics of the modularization and componentization of the model and supports editing model parameters to realize model instantiation.Not only the reusability of the model can be enhanced,but also the coupling degree between the models can be reduced,thus greatly improving the development efficiency of simulation applications [34-36].
3.1.1 Model definition
(i) Rocket model.After assembling the rocket entity model with different component models,the key launching functions and performance characteristics can be formed.In the simulation run time,according to the bound component data,runtime battlefield data,the different working states and modes of trajectory flight and control,rocket mounted control and telemetry can be analyzed and calculated.
(ii) Spacecraft model.After assembling the spacecraft model with the on-orbit component model with different orbital parameters,the operation status such as the position and velocity in orbit of the spacecraft can be solved and simulated.After assembling with radar,optical,infrared and other different component models,the reconnaissance capability of the payload on the spacecraft can be simulated.After assembling with the model of search and tracking and other action components,the designated target area,position reconnaissance and surveillance capability can be simulated.
(iii) Ground application system model.The ground application system model is used to simulate the ground application system such as launching vehicle,launching erection system,measurement and control equipment,launching position,test factory and so on.After assembling the ground application system entity model with different component models,such as radar and photoelectric,the measurement and control capability of different stations and vehicles,such as optical measurement and telemetry can be simulated.After assembling with the vehicle motion component model with different capability parameters,the maneuvering performance of different vehicles such as launching vehicle and measurement and control vehicle can be simulated.After assembling with satellite and rocket assembly,satellite and rocket test,maneuvering turn,launching preparation,rocket launching,search and tracking and other component models,the emergency maneuvering,rapid launching,satellite and rocket separation,on-orbit service and other aspects can be simulated.
3.1.2 Model construction
All models are constructed in the form of “.dll” file,and equipped with an “.MCF” configuration file of the same name,which covers the model name,parameter name,display mode,etc..Model management and classification display can be realized by analyzing the model configuration file.The model parameters are set and displayed through the dynamic generation method.The attribute information of model parameters is divided into two categories: basic data and non-basic data.In the case of using the same local database,the basic data of the model objects instantiated by the same template will remain the same,that is,one change will be all changed,while the edits of non-basic data will only be valid for the current model object.Constructors that match the interface specification can be successfully loaded.When configurable,the “constructor=” description needs to be added to the model display profile.
3.1.3 Model assembly
Model assembly refers to visually assembling the model,modifying the model parameters and instantiating the model.The assembled model can be loaded and displayed,and the three types of model,namely platform,weapon and component,are displayed in the form of tabs.The node of the model tree can be selected to display the basic information and component information of the model.The model templates can be created and deleted.Models can be generated through assembly and editing parameters and stored in the database.
3.1.4 Model operation dataflow
Model operation dataflow is shown in Fig.5,which includes rapid responsive rocket and satellite,launching vehicle,launching erecting system,measurement and control equipment,rapid responsive satellite,launching position,rocket and satellite test factory,optical imaging satellite,electronic reconnaissance satellite,and infrared(IR) early warning satellite model.

Fig.5 Model operation dataflow
3.2 Launching mission planning model construction and information low design
Launching mission planning models [1] mainly include launching style analysis,satellite orbit planning,launching mission marshaling and launching scheme generation.For typical launching orbits such as sun-synchronous orbit (SSO) and low Earth orbit (LEO),launching style analysis can carry out satellite and rocket matching analysis,carrying capability analysis and force status analysis according to the current launching capabilities and support conditions,and can obtain qualitative mission satisfaction analysis conclusions to help selecting launching styles to form standardized mission instructions.Satellite orbit planning can design the satellite orbit plane requirements,satellite orbit semi-major axis,eccentricity,orbital inclination,the longitude of ascending node,the argument of perigee,true anomaly,etc.In addition,it includes platform load confirmation,satellite orbit calculation,constellation optimization design,launching window calculation [37] and other functions.For launching missions,launching mission marshalling can carry out carrying capability optimization,trajectory calculation and landing zone analysis to design available trajectory data with security,avoidance and launching window in mind.It can determine the rocket type with the launching cost,launching responsive time,carrying capacity margin,and rocket type deploy in mind.It can determine the mission force with the current force state,the primary trajectory and the rocket type.It can check the generated satellite orbit based on the rocket survivability and the orbit injection probability.On the premise of meeting the requirements of satellite orbit time and considering the constraint conditions of trajectory safety pipeline,launching scheme generation can analyze and determine the minimum time interval between each launching.The trajectory data generated in the early stage can carry out the trajectory refinement calculation and form the starting calculation conditions for the accurate trajectory solution,based on information such as the equipment performance parameters and the actual launching position.According to the launching missions,measurement and control requirements,external measurement accuracy,etc.,it can determine the ground measurement and control vehicle deployment points and selected ground measurement and control stations,to form the launching area and flight area measurement and control scheme.It can carry out emergency launching maneuver path planning analysis,maneuver safety time window analysis to plan the departure time of each launching unit to form the maneuvering and turning plan.According to the typical workflow of satellite and rocket assembly,it can analyze and determine the factory station layout,timing sequence and total time of satellite and rocket assembly.
The whole launching mission planning information flow is shown in Fig.6.Firstly,it receives the scenario data file,parse launching target and other scenario data,and carries out launching style analysis to generate the launching mission.Secondly,it determines the satellite load according to the range and nature of the launching target,and carries out satellite orbit planning.Thirdly,it carries out carrying capacity optimization according to the information elements such as the calculated satellite orbit,satellite and rocket,and form the launching mission marshalling scheme based on the combining information elements such as launching force,satellite,orbit scheme and launching position to provide the input of the trajectory planning,measurement and control planning and launching vehicle maneuver planning.Finally,it generates launching cards and launching schemes by using the launching mission as the information index to provide mission planning information for launching process simulation.

Fig.6 Launching mission planning information flow
4.Key technologies analysis
4.1 Launching trajectory optimization calculation analysis
According to the mathematical model of multi-stage rocket,the optimization design of the whole process from rocket launching to the satellite entering to the designate orbit injection point will be carried out,to support the optimal control of the launching trajectory of the rocket according to the launching position and the orbit injection point,and to provide the calculation of rocket launching debris falls area.The following seven key optimal launching parameters need to be iteratively calculated: decline rate of the first linear descent segment,decline rate of the second linear descent segment,decline rate of the third linear descent segment,decline rate of the fourth linear descent segment,launching angle (unit:radian),launching position latitude (unit: radian),and launching position longitude (unit: radian).The following five key objective parameters need to be weighted and accumulated to calculate the total cost function in the optimization process: orbit semi-major axis deviation(unit: meter),orbital eccentricity deviation,trajectory inclination deviation at the orbital entry point (unit:degree),orbit height deviation (unit: meter),and orbital inclination deviation (unit: degree).The problem to be solved in the optimization calculation of launching trajectory is to iteratively calculate the seven key launching parameters according to the mathematical model of multistage rocket and obtain the seven key optimal launching parameters by searching or approaching the minimum value of the total cost function in the range of multidimensional space.The basic computation process is shown as the follows.
Step 1Initialize.
Step 1.1Input parameter initialization.
Step 1.2Initialization of multistage rocket general coefficient.
Step 1.3Initialization of velocity coordinate vectors in the launching coordinate system.
Step 2Transform the launching coordinate system position vector to the geocentric coordinate system position vector.
Step 3Calculate air coefficient according to height.
Step 4Calculate the trajectory inclination and deflection angle according to the velocity vector under the launching coordinate system.
Step 5Set the pitching program angle according to the optimization parameters.
Step 6Set the pitch yaw angle and program roll angle.
Step 7Classification.
Step 7.1Calculate the mass of the aircraft.
Step 7.2Calculate the attack angle and sideslip angle.
Step 7.3Calculate the thrust component under the rocket coordinate system according to the equivalent pitch swing angle and equivalent yaw swing angle of the engine,and the thrust component under the velocity coordinate system through the vector transformation between the velocity coordinate system and the rocket coordinate system.
Step 7.4Calculate [drag,lift,side force] under the velocity coordinate system,and calculate [drag,lift,side force] under the rocket coordinate system through the vector transformation between the velocity coordinate system and the rocket coordinate system.
Step 7.5Calculate the heeling angle under the launching coordinate system.
Step 8Calculate the rocket trajectory.
Step 8.1Calculate the apparent acceleration vector under the rocket coordinate system.
Step 8.2Calculate the resultant force of the three directions under the velocity coordinate system.
Step 8.3Calculate the Coriolis inertial forces and the implicated inertial forces.
Step 8.4Calculate corrected gravitational acceleration.
Step 8.5Calculate the transformation matrix from the launching coordinate system to the velocity coordinate system.
Step 8.6Calculate the acceleration vector of the rocket under the launching coordinate system.
Step 8.7Calculate the velocity vector and position vector of the rocket under the launching coordinate system.
Step 8.8Calculate the local trajectory inclination,longitude of orbit injection point and geodetic latitude of orbit injection point.
Step 9Calculate the satellite orbit roots.
Step 10Determine if it is within the time range.If yes,proceed to Step 11.Otherwise,proceed to Step 2.
Step 11Return the cost function value.
A general trajectory solution with a constrained optimization problem has been constructed,which has the strong ability to search the minimum value of the total cost function in multidimensional space.By using the SNOPT toolbox to carry out the iterative optimization calculation of the launching trajectory optimization process and organically integrating with the Matlab mathematical model of the rocket,the optimization efficiency can be significantly improved.Aiming at the emergency launching scenario of a satellite,the method based on the SNOPT optimization toolbox is adopted to optimize the launching trajectory,and the results of optimization calculation are shown as follows.
According to different satellite orbit types,satellite weights,orbital heights,launching positions and rocket types,the theoretical orbit accuracy of the planned trajectories will be calculated respectively to verify the effectiveness of the trajectory planning algorithm model in this paper.The evaluation criteria for theoretical orbit accuracy are as follows: (i) Meeting the requirements of theoretical orbit accuracy.The semi-major axis deviation is less than or equal to 0.5 km,|Δa|≤0.5 km.The eccentricity deviation is less than or equal to 0.002,| Δe|≤0.002.The orbital inclination deviation is less than or equal to 0.05°,|Δi|≤0.05°.(ii) Basicly meeting the requirements of theoretical orbit accuracy:
For SSO,two satellite weights,e.g.,100 kg and 200 kg,three orbital heights,e.g.,300 km,500 km and 700 km,thirteen typical launching positions,and two typical rocket types are distinguished.Theoretical orbit accuracy of planned trajectories has been calculated under the premise of given typical target satellite orbit.Below is the theoretical orbit accuracy distribution map of 156 planned trajectories,where,theXaxis represents the semi-major axis deviation,Yaxis represents the orbital inclination deviation,Zaxis represents the eccentricity deviation,the red cube region represents the area that meets the requirements of theoretical orbit accuracy,the difference set of the red cube and the tetrahedron composed of the red plane and three coordinate planes represents the area that basicly meets the requirements of theoretical orbit accuracy and other areas represent the areas that do not meet the requirements of theoretical orbit accuracy.Green ○,green +,blue X,yellow *,red ☆,black □ respectively represent the theoretical orbit deviation of the planned trajectories of SSO-200 kg-700 km,SSO-100 kg-700 km,SSO-200 kg-500 km,SSO-100 kg-500 km,SSO-200 kg-300 km,SSO-100 kg-300 km.As shown in Fig.7,the eight points outside the cube area basically satisfy the requirements of theoretical orbit accuracy,while the other points meet the requirements of theoretical orbit accuracy.

Fig.7 Theoretical orbit deviation distribution of the planned trajectories for the SSO

Two satellite weights,three kinds of orbital heights,twelve typical launching positions,and two typical rocket types are distinguished for LEO.Under the premise of given typical target satellite orbit,theoretical orbit accuracy of planned trajectories have been calculated.According to different satellite weights,different orbital heights have been selected,namely: (i) For 100 kg satellite weight,three orbital heights such as 300 km,500 km and 700 km have been selected;(ii) For the weight of 200 kg satellite,three orbital heights such as 300 km,400 km and 500 km have been selected.Below is the theoretical orbit accuracy distribution map of 144 planned trajectories,where,green ○,green +,blue X,yellow *,red ☆,black □ respectively represent the theoretical orbit deviation of planned trajectories of LEO-200 kg-500 km,LEO-100 kg-700 km,LEO-200 kg-400 km,LEO-200 kg-400 km,LEO-100 kg-500 km,LEO-200 kg-300 km.As shown in Fig.8,the eight points outside the cube area basically satisfy the requirements of theoretical orbit accuracy,while the others meet the requirements of theoretical orbit accuracy.

Fig.8 Theoretical orbit deviation distribution of the planned trajectories for the LEO
For retrograde orbit,two satellite weights such as 100 kg and 200 kg,three orbital heights such as 268 km,286 km and 300 km,thirteen typical launching positions,and two typical rocket types are distinguished.Theoretical orbit accuracy of planned trajectories has been calculated under the premise of given typical target satellite orbit.Below is the theoretical orbit accuracy distribution map of 158 planned trajectories,where,green ○,green +,blue X,yellow *,red ☆,black □ respectively represent the theoretical orbit deviation of the planned trajectories of RO-200 kg-300 km,RO-100 kg-300 km,RO-200 kg-286 km,RO-100 kg-286 km,RO-200 kg-268 km and RO-100 kg-268 km.As shown in Fig.9,the twenty-one points outside the cube area basically satisfy the requirements of theoretical orbit accuracy,while the other points meet the requirements of theoretical orbit accuracy.

Fig.9 Theoretical orbit deviation distribution of the planned trajectories for the retrograde orbit
The planned trajectories’ total quantity (T-Q),satisfaction quantity (S-Q) and satisfaction rate(S-R,S-R=)according to the theoretical orbit accuracy requirements are shown in Table 1.As shown in Fig.10,for the 268 km,286 km,300 km,400 km,500 km,700 km orbit height,the planned trajectories’ total quantity is 54,52,152,24,100 and 76 respectively,and the satisfaction rate is 90.74%,82.69%,90.13%,100.00%,96.00%,94.74% respectively.For the SSO,LEO and retrograde orbit,the planned trajectories’ total quantity is 156,144 and 158 respectively,and the satisfaction rate is 94.87%,94.44% and 86.71% respectively.To sum up,for all the orbit heights and types,the planned trajectories’ total quantity is 458,and the satisfaction rate is 91.92%.

Table 1 Planned trajectories’ total quantity,satisfaction quantity and satisfaction rate
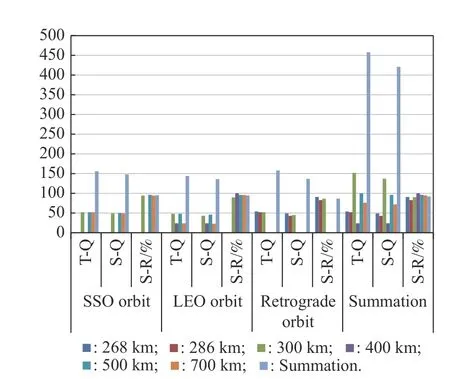
Fig.10 Comparison of planned trajectories’ total quantity,satisfaction quantity and satisfaction rate under different orbital heights
The quantitative distribution of the planned trajectories which basically satisfy the theoretical orbit accuracy requirements is shown in Table 2 and Fig.11,where the basic satisfaction quantity distributed in the 286 km of retrograde orbit is the largest.For the three different orbit types,the basic satisfaction quantity distributed in the retrograde orbit is the largest.For the six different orbit heights,the basic satisfaction quantity distributed in the 300 km orbit height is the largest.

Table 2 Basic satisfaction quantitative distribution of the planned trajectories

Fig.11 Basic satisfaction quantitative distribution of the planned trajectories
4.2 Multi-point salvo collision calculation analysis
The multi-point salvo collision calculation analysis quantitative index is to calculate the collision probability between any two rockets according to the standard trajectory and deviation trajectory analysis of rocket,so as to provide the analysis and calculation basis for the reasonable selection of the safe launching window,thus significantly reducing the probability of severe accidents during the mission implementation.
The rocket collision probability calculation parameters are the state vector(t10) and the error covariance matrixP1(t10) of the master rocket at timet10,the state vector(t20) and the error covariance matrixP1(t20) of the slave rocket at timet20.The state vector=(r,v) and the covariance matrixPare described under the same coordinate system,such as the launching coordinate system.Two rockets in accordance with their respective launching trajectory,through the appropriate proximity analysis algorithm,the specific timetcacan be confirmed in the future at which two rockets reach the nearest.According to(tca),P1(tca) and(tca),P2(tca) which are the state vector and error covariance matrix of two rockets at the timetcarespectively,the collision probabilityPccan be calculated,as shown in Fig.12.

Fig.12 Basic idea for the collision probability calculation of two rockets
The preconditions for calculating the collision probability of the two rockets are as follows:
(i) The standard trajectory parameters under the launching coordinate system of the two rockets are known,thus determining the state vector.
(ii) The deviation trajectory parameters under the launching coordinate system of the two rockets (namely 3σ the position error pipeline deviation) are known,thus the safety radius and the error ellipsoid are determined.
(iii) The rocket position error obeys the 3D Gaussian distribution,so it can be described by the distribution center (trajectory parameter position) and the standard deviation of position error.
The collision probability is defined as the probability of close to the distance between two rockets is less than the safety radius sum.The probability calculation process is essentially within the error ellipsoid of the probability density function to solve the problem of triple integral.The integral calculation process is complex and not convenient for programming,therefore needs to be equivalently transformed.Taking the rocket coordinate system of the master rocket as the reference datum,when the two rockets are the closest in distance,the meeting plane of them is defined in the reference datum.At this time,both rockets are located in the plane.In this way,the problem of calculating the collision probability can be transformed into the problem of calculating the integration of 2D PDF in the circular domain [31-33].
The origin of the rocket coordinate system is the center of massOMof the rocket,the axisXMpoints to the head of the rocket and recombines with the axis of the rocket,the axisYMpoints to the III rudder plane in the past sectionOM,and the axisZM,axisXMand axisYMconstitute the right hand coordinate system,that is,pointing to the IV rudder plane.Among them,the so-called rudder surface refers to the position of the traditional rudder wing.When the rocket is erected on the launching vehicle,the position pointing to the launching direction is regarded as the “I rudder surface”,as shown in Fig.13.
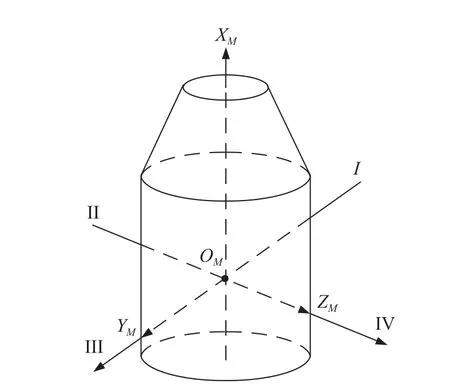
Fig.13 Rocket coordinate system definition
In the meeting planeYM1OM1ZM1of the master rocket coordinate systemOM1-XM1YM1ZM1,the collision probability of the two rockets can be expressed as
where µy,µz,σy,σzandRAare the calculated parameters of the collision probability in the meeting plane,as shown in Fig.14.

Fig.14 Calculated parameters of collision probability in the encounter plane
In Fig.14,OM1is the center of mass of the master rocket,OM2is the center of mass of the slave rocket,RAis the joint safety radius of the two rockets,andRtcais the minimum approach distance between the centers of mass of the two rockets.
According to the analysis of the conclusion,(1) after an infinite series expansion,only takes its first as a probability integral approximation,the relative magnitude of the truncation errors are 10-5.The approximate calculation formula of (1) can be obtained as follows:
Formula (2) is the basic formula for calculating the collision probability of two rockets.When the conditionsRtca≤RAis satisfied,the calculation parameters of each collision probability µy,µz,µz,σyand σzcan be obtained by the following formula:
Y21mandZ21mare the two components of the slave rocket position vectorr21mat the timetca;Y1+,Y1-,Z1+andZ1-are the four component deviations of the master rocket position error pipeline at the timetca;Y2+,Y2-,Z2+andZ2-are the four component deviations of the slave rocket position error pipeline at the timetca.
The algorithm flow is shown in Fig.15.

Fig.15 Multipoint salvo collision analysis algorithm flow chart
4.3 Mission assignment technique under resource scheduling constraint
The main launching constraints mainly include two aspects as follows.Firstly,because of the launching window limitation,it is difficult to launching at any time.Secondly,because of the guarantee capability limitation,it is difficult to implement all-weather and on-time launching.Therefore,it is necessary to focus on the unified launching target,rocket carrying capacity and other key elements to study the mission assignment technique under resource scheduling constraint.The key technical directions include three aspects as follows.
Firstly,the network series model will be constructed with several constraints to generate schemes.As shown in Fig.16,network nodes include the mission,action,satellite,rocket and force.Node pairing will be carried out orderly under the constraint such as C1,C2,C3,C4.C1 consists of the mission targets,time requirements,etc.C2 consists of the satellite orbit type,height,satellite payload and other requirements.C3 consists of the satelliterocket matching rules,rocket carrying capacity restraint,etc.C4 consists of the launching window,force status,force deployment,rocket type,satellite type,and other restraints.Several alternative schemes will be generated by node pairing such as M-A,A-S,S-R,R-F.The scheme evaluation and optimization will be carried out according to the customized evaluation indexes to generate the primary scheme and standby schemes from the alternatives.

Fig.16 The network series model
Secondly,the spatial and temporal distribution model will be constructed with two dimensions such as the launching position and time window,to carry out the conflict resolution of schemes.As shown in Fig.17,the vertical axis represents launching position and the horizontal axis represent time window.Each launching area contains several different launching positions,and several different launching missions will be carried out in respective designated time window in each launching position.For security reasons,different launching missions arranged in the same launching area must have non-overlapping launching time windows.Therefore,conflict resolutions need to be carried out between the time window TW1 and TW3,TW6 and TW8,TW2 and TW5.

Fig.17 Spatial and temporal distribution model
Finally,launching simulation will be carried out to reduce consumption and achieve the overall optimization,under various resource scheduling and launching time sequence coordination.Launching simulation includes launching scenario editing,launching data management,launching situation analysis and launching simulation analysis.According to the launching target,launching scenario editing can establish the launching simulation scenario,set up the launching equipment and other entities and launching action elements,and determine the simulation process data that needs to be collected based on the launching target and scenario to establish the analysis data source.Launching data management can realize the data processing,mining analysis and visual presentation for the battlefield environment,launching equipment,launching area and others to provide data support for the launching simulation.According to the launching area,satellite detection range,force deployment,launching position,meteorological information,launching process,etc.,launching situation analysis can generate the battlefield situation.According to the launching scheme,launching simulation analysis can carry out launching simulation to analyze the emergency launching effect and satellite coverage completion.The launching simulation information flow is shown in Fig.18.Launching simulation will first construct launching scenarios,select launching targets,and then push scenario data to launching mission planning.Secondly,launching mission planning will formulate the launching scheme and send it to the basic simulation platform as launching simulation basis.Finally,launching simulation will real-time collect simulation data from basic simulation platform and distribute it to launching situation analysis and the simulation analysis.

Fig.18 Launching simulation information flow
5.Application result analysis
5.1 Satellite constellation design
Satellite constellation parameters is shown in Table 3,where the constellation configuration is 4/6/1 walker configuration,the orbit height is 268 km,and the trajectory inclination is 139°.

Table 3 Satellite constellation parameter
The satellite constellation on-orbit operation is shown in Fig.19.


Fig.19 Satellite constellation on-orbit operation
5.2 Launching strategy design
Eight solid rockets will be used to carry twenty-four satellites to four orbit planes,from 0:00 hours on 18 March 2022 to 0:00 hours on 19 March 2022,in the three given launching areas by the distributed collaboration launching strategy.After preliminary analysis and calculation,the launching time windows in each launching area are shown in Table 4.

Table 4 The launching plan
5.3 Effectiveness evaluation
The average and max revisit time of type target positions are shown in Table 5.

Table 5 Average and max revisit time of type target position
5.4 Safety analysis
The debris falling area is shown in Fig.20,by the map operation,rocket debris falling areas meet security requirements.

Fig.20 Debris falling area
6.Conclusions
In this paper,the agile space emergency launching mission planning simulation and verification method has been proposed.For the first time,the agile,flexible,quantitative and modular solution of multi-field area,multi-platform and multi-mission parallel emergency space launching mission planning under the constraint of resource scheduling is systematically given.Firstly,the research has been carried out on overall scheme,including overall architecture and technology architecture.Secondly,the research has been carried out on simulation model construction,including the modularization model construction and integration analysis,the launching mission planning model construction and information low design.Thirdly,the research has been carried out on key technology analysis,and the effectiveness of the key algorithm models has been verified by experimental and theoretical analysis.Finally,with a large-scale rapid networking launching mission as the background,the research has been carried out on satellite constellation design,launching strategy design,effectiveness evaluation and safety analysis.Through the demonstration and verification,it can be seen that the method in this paper has business functions with relatively complete elements and business processes with basically correct logic,and is capable of integrating planning,simulation and evaluation.
 Journal of Systems Engineering and Electronics2023年5期
Journal of Systems Engineering and Electronics2023年5期
- Journal of Systems Engineering and Electronics的其它文章
- Reliability analysis for wireless communication networks via dynamic Bayesian network
- Attention mechanism based multi-scale feature extraction of bearing fault diagnosis
- LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle
- Anti-interference self-alignment algorithm by attitude optimization estimation for SINS on a rocking base
- TOA positioning algorithm of LBL system for underwater target based on PSO
- Scene image recognition with knowledge transfer for drone navigation