
基于倾斜摄影测量的露天土石挖填方计算研究
2023-11-06 01:37贺艳花
科技资讯 2023年20期
贺艳花
(贵州黔美测绘工程院 贵州贵阳 550000)
近年来,随着国家经济发展与“一带一路”倡议的共建,各种类型的设施建设项目越来越多。如何使工程项目的进度安排更加经济合理,如何准确、快速地对工程量大小与费用进行计算,是工程建设过程中面临的难题,而这些问题的解决有赖于高效率和准确的土石方量计算方法[1]。因此,选择合适的地形数据采集与土石方量计算方法十分重要。
水准仪测量法、全站仪测量法和全球导航卫星系统(Global Navigation Satellite System,GNSS)测量法作为传统的土石方测量方法在生成一直得到广泛的应用。水准仪法首先将整个测区划分成若干大小相等紧密相连的方格网,然后对方格网的4 个角点的高程用水准仪进行高程值的测量,最后通过设计的标高值用格网法对土方量进行计算[2]。这种方法的适用性较为单一,如果测区不符合方格网的结构布设,水准仪法就不一定适用,且该方法费时、费力。全站仪法仪器操作简单,适用于测量面积不大且通视情况良好的区域,但如果通视条件不好,采用全站仪法就会比较繁复,且发挥不出相应的效率。GNSS 法是目前挖填土石方测量中较为常用的一种方法,其不受距离和通视条件限制,且测量速度较全站仪有所提高。然而,当测区中GNSS信号受到影响,或人工无法到达测区时,该方法就无法顺利完成。综上所述,这3 种传统方法很大程度上受到地形的影响,导致挖填土石的效率不高、人力成本较高。如何找到高效、安全且低成本的挖填石土方测量方法,成为当前亟待解决的问题[3]。
利用无人机机动灵活和快速高效的特点,可大大提高数据获取效率,降低对摄影环境的依赖,利用无人机技术可以快速、准确地获取高分辨率的影像。无人机的应用已在工程的各个环节中起到越来越重要作用。国内外众多学者已对使用无人机技术进行挖填土石方量测量开始试验,由于该方法不需要接触被测目标且不受场地障碍影响,大大降低野外人工现场采集作业人力成本与土石方量计算管理成本,可快速获取测区的地形模型,为测量工作人员提供了安全保障。
1 基本原理
无人机影像三维建模技术是基于计算机视觉原理的一种三维建模技术。具体步骤如下:(1)从给定影像中自动检测出可靠且充分密集的连接点,利用连接点对大量影像进行自动重定向;(2)根据重定向结果进行投影重建,标定相机位置等信息;(3)通过CMVS(Cluster Multi-View Stereo)、PMVS(Patch-based Multi-View Stereo)等算法进行密集匹配;(4)从点云通过构建三角网格模型得到目标三维模型。首先通过使用定位定向系统(Position and Orientation System,POS)或GNSS 差分系统进行精确定位,以提供每一张影像POS信息,再结合基于影像的自动空三加密、影像密集匹配、纹理映射最后生成模型等系列步骤,完成整个三维重建过程。在自动空三加密中应用到影像连接点匹配、影像匹配粗差检测以及影像区域网平差3 个步骤,下面将对相关技术进行介绍。
1.1 影像连接点匹配
目前,在影像连接点匹配中较为常用的尺度不变特征转换(Scale Invariant Feature Transform,SIFT)匹配算法。SIFT特征匹配算法与影像间的大小和影像之间是否进行旋转无关,其是通过物体上的一些局部外观的兴趣点来进行匹配的[4],对光线、噪声、微视角改变具有相当高的容忍度。这些特性使其显著度较高,而且撷取也相对容易,在样本庞大特征数据库中,比较容易辨识物体且误认率较低。对于影像中的对象有部分被遮蔽的使用SIFT特征描述监测率也较高,有时只需要有3 个以上的SIFT 物体特征就可以计算出位置和方位。
SIFT 特征点匹配的具体方法如下。(1)构建尺度空间:高斯卷积和图像金字塔。(2)检测尺度空间的极值点,在DOG尺度空间本层以及上下两层26个领域中是最大值和最小值,然后剔除对比度低的关键点与不稳定点的边缘响应点。(3)计算关键点主方向。(4)生成128 维的关键点描述子。(5)SIFT 匹配:通过计算待匹配的两特征点间的欧氏距离作为匹配测度。
1.2 倾斜影像匹配粗差检测
检测方法如图1所示,具体流程如下。
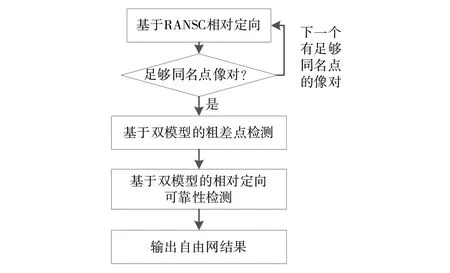
图1 粗差剔除与自由网构建流程
(1)采用RANCSAC(随机采样点一致性)的方法,基于5 点法相对定向模型(共面条件)进行粗差检测。(2)基于双模型的粗差点检测。对于双模型间的三度重叠点,采用空间前方交会计算点残差,剔除残差大的粗糙点。(3)基于双模型的相对定向可靠性检测。不断选择相互间具有足够连接的3 张影像,依次在影像间两两进行相对定向,计算相对定向线元素和旋转矩阵。如果相对定向正确,3 个线元素向量应共面,3 个旋转矩阵相乘为单位阵。
1.3 倾斜影像密集匹配
半全局匹配(Semi-Global Matching)是一种双向密集匹配算法。通过对每个像素点的视差进行选取,进而形成了一个视差地图,然后以此为基础设置一个全局能量函数,该函数与视差地图相关,并且使该能量函数最小化,从而达到求解每个像素最优视差的目的。半全局算法尝试使用影像上的多个方向上一维路径进行约束,来建立一个全局的马尔科夫能量方程,每个像素得到的最终匹配代价为所有路径信息的叠加,每个像素的视差选择均为简单WTA(Winner Takes All)所决定的。
1.4 倾斜影像拼接
对于虚拟影像上的像素,综合考虑以下条件,选择在那张倾斜影像上获取其灰度值:(1)该像素对应地面点到候选点倾斜影像的距离;(2)地面点到虚拟影像透视中心的光线与地面点到候选影像透视中心的光线间夹角。
减小高出地面竖直物体的重影效应的方法如下:(1)在平坦地区进行拼接;(2)采用待拼接的两影像在接缝处密集匹配生成数字地表模型(Digital Surface Model,DSM);(3)在倾斜影像和对应的下视影像间匹配直线特征,识别竖直地物进,而对其位置进行改正。
2 实施技术路线
进行土石方量的计算是为求出地形表面的体积差,其主要是对现状地形和给定的标高之间的差值。因此,通过无人机航测方式进行的挖填土石方量计算主要是使用无人机来获取影像对研究区域构建数字高程模型(Digital Elevation Model,DEM)和数字正射影像(Digital Orthophoto Map,DOM),然后通过设计标高和导入ArcGIS 软件中的DEM、DOM,选取需要计算土石方量的区域与DEM模型,对测区DEM数据和设计标高进行统计分析,计算得出土石方的填挖过程中挖填方量[5]。
通过将倾斜摄影的空中三角测量与基于密集匹配的自动建模技术于一体,首先,利用倾斜航空摄影平台进行数据采集,再进行野外像片控制点的量测,然后采用自动建模软件进行数据处理,生成测区的三维模型,技术路线流程如图2所示。
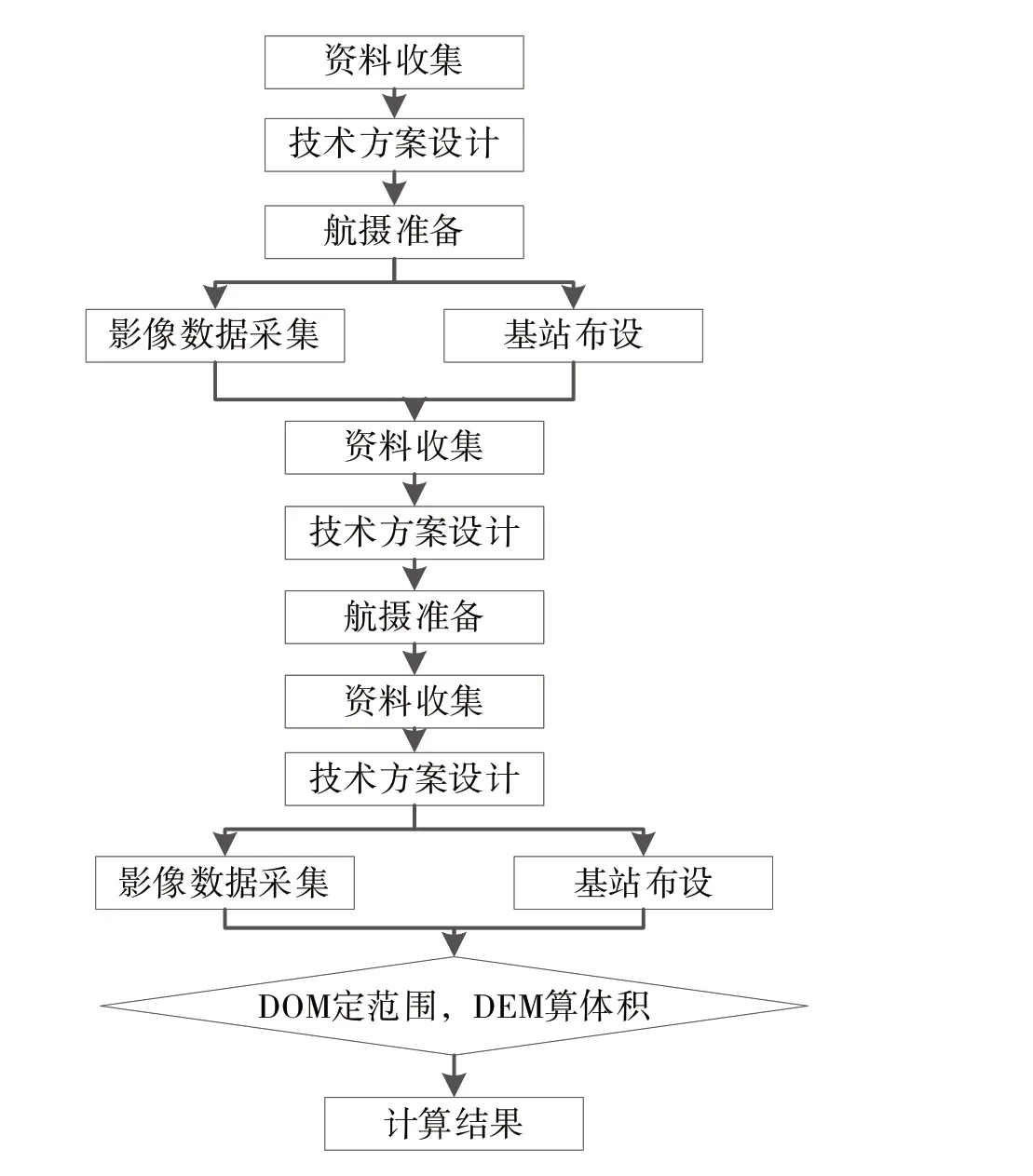
图2 倾斜摄影建模流程
2.1 外业数据采集
外业采集流程如下。(1)设计航带。先对测区进行实地踏勘,然后根据情况选择有起伏地形的工地进行试验,按照《低空数字航空摄影测量外业规范》(CH/Z 3004-2010)中规范要求,对该项目进行外业航带的设计。根据规范要求,该项目确定航飞高度为50 m,航向重叠度和旁向重叠度分别为75%和45%。(2)像控点布设。根据规范要求,该项目在测区四周与中间均匀布设了6个平高控制点,并保证控制点至少能在3张影像上同时找到。(3)航测参数设定。根据航飞现场情况,确定各项飞行参数,完成航测数据采集工作。
2.2 航测数据处理
对采集完成的航测数据采用Smart3D软件进行数据处理,流程图见图3。无人机连接点模型如图4 所示,特征高程点与DOM叠加确定测区范围如图5所示。
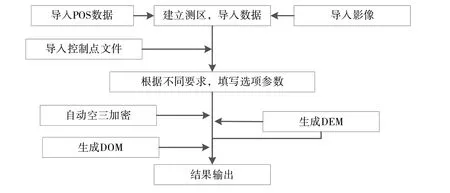
图3 内业处理流程
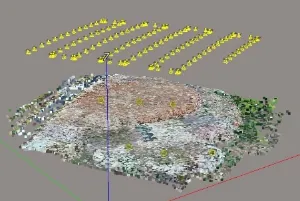
图4 无人机连接点模型
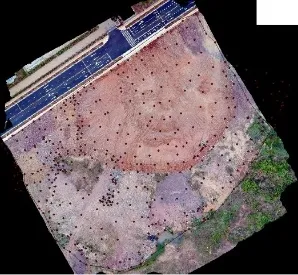
图5 特征高程点与DOM叠加确定测区范围
2.3 土石方量计算与分析
(1)将生成DEM数据导入ArcGIS软件中,使用3D分析工具DEM 数据作为输入数据选定一定标高作为挖填基准面,并进行挖方与填方的计算,分别计算出设计标高情况下的挖填方量[6]。
(2)使用实时动态测量(Real Time Kinematic,RTK)技术对研究区域内的地形特征点进行采集,得到研究区域的地形特征点的高程值,并将其数据采集结果导入Cass 7.0,再使用方格网法和三角网法以设定的标高作为挖填基准面,计算挖填方量。
(3)分别将传统方法和无人机生成DEM方法进行挖填石土方量计算结果进行比较。
(4)传统GNSS测量特征点使用方格网法和三角网法计算得到土石方量结果,并与无人机航测计算结果进行比较,对比结果表明:测区面积27 425.0 m2,两种方案的挖方量相差结果为168.37 m3,占总挖方量的3%,填方量相差结果为1 078.36 m3,占总填方量的1.3%。
3 结论
通过采用无人机航测技术来进行挖填土石方量计算并对其结果进行比较,对比结果表明:通过使用无人机航测技术使工程中的土石方量计算拥有了一些的优势。(1)与传统GNSS或RTK采集特征点进行土石方测量方法相比,无人机航测技术体现出灵活、机动,不需要接触被测目标且不受场地障碍影响,无论是平缓还是陡峭地形均可进行。(2)数据采集更加迅速,该测区面积达27 425.0 m2,使用传统RTK 特征点方法数据采集花费时间为4 h左右(时间长短因地形情况会有所变化),而无人机航测技术构建DEM方法仅需4 min完成外业数据采集,所以当测量面积较大或地形复杂时其优势更加明显,此方法减少了外业人员投入,减轻了外业的工作量,大大节约了生产的成本。(3)由于使用无人机采集数据,在获得DEM 数据同时,此方法还获取了影像数据,对准确划定土石方量的计算范围起到辅助作用,最终计算出更准确的结果。
通过采用无人机航测技术来进行挖填土石方量计算并对其结果进行比较,对比发现两者之间仍然存在误差,并对两者之间存在的差值进行了如下分析。(1)无人机所采集的照片均为地形特征点表面,而使用RTK 采集地形特征点时,当对中杆立于被测物体表面时,对中杆会存在一定下沉,使得算土方量时两者之间出现了一定差值。(2)由于RTK 只是采集有地形特征变化的点对于平坦无地形变化的地区在1∶500测图中为10~15 m 才一个点,而无人机进行空三加密后生成的DEM 通过相对航高和相机的焦距与影像分辨率所确定的地面采样点间距要远远比传统方法小,所以在使用传统方法时将方格网或三角网的间距设的越接近无人机地面采样点间距两者之间差值也就越小。
猜你喜欢
水文地质工程地质(2022年2期)2022-04-13
电子乐园·上旬刊(2021年8期)2021-05-16
河南城建学院学报(2020年3期)2020-08-14
城市道桥与防洪(2019年5期)2019-06-26
筑路机械与施工机械化(2017年6期)2017-07-10
汽车文摘(2016年6期)2016-12-07
水利科技与经济(2016年9期)2016-04-22
中国房地产业(2016年2期)2016-03-01
电测与仪表(2015年3期)2015-04-09
交通建设与管理(2015年15期)2015-03-20
