
基于智能交通的车路协同系统技术应用研究
2023-11-03 07:28桑中山景峻李杰张英潮宋增磊
中国新通信 2023年17期
桑中山 景峻 李杰 张英潮 宋增磊
摘要:车路协同系统(CVIS)是将车辆和道路的各种信息融合在一起,实现了智慧交通中车和路在智慧交通中的一体化的系统。本文列举了当前国内外关于车路协同的研究现状,并对车路协同中存在的主要技术进行了简要分析。在此基础上,结合时代发展趋势,对展望了5G技术和大数据环境下车路协同系统的发展前景进行展望,并对分析了5G技术支持下的交通系统带来的便利及应用进行分析,为未来车路协同系统的研究奠定理论基础。
关键词:车路协同;研究现状;关键技术;未来5G技术
在过去的几十年里,随着我国经济的飞速发展,人们的经济条件和生活水平都有了很大的提高。随着汽车数量的不断增加,与汽车相关的交通问题也逐渐增多,例如人们现在所面临的交通拥堵、交通安全问题,它们都是随着经济的发展而出现的新问题。以往对于解决这类问题的经验并不多。在当今的社会环境中,科学技术一直在不断地进步,车辆研发技术与以往已经有了很大的不同,道路的建设和管理都有了一套更加科学的方法。在这种情况下,车辆与道路的有机结合研究方法就应运而生了。
车路协同,顾名思义就是车辆和道路的相互作用,使车辆与道路成为一个整体。在这个整体中,道路主要影响的是路面管理系统。在铺路过程中,要严格遵守各项铺路指标,引进设备对铺路进行精细施工,尽量减少误差,确保铺路质量。如果道路的路面系统得不到良好的管理与控制,车路协同系统就无法有效地发挥作用。因此,车路协同系统是以车辆系统和道路系统为基础进行研究与发展的。
车路协同技术具有独特的优势,可以实时观测、分析车辆周围环境及自身运行状态,为驾驶员提供最优的出行方案和驾驶行为建议。同时,它还可以减少车辆出行延误、节能降耗、提高道路通行能力和道路服务水平,因此受到了交通管理者的广泛关注与研究。世界各国也进行了较早的研究,目前车路协同系统正在呈现出较强的发展势头。
一、车路协同系统功能及主要技术
(一)协同系统的功能
车路协同系统为驾驶员提供更多的驾驶信息,使其了解车辆的运行状态和道路的信息。同时,该系统还能够让交通服务提供商及时提供必要的交通服务,以确保路网安全、快速、畅通,并改善出行者的出行体验,保障他们的出行安全。此外,该系统还能提升道路的通行能力与服务水平。
(二)车路协同系统主要技术
1.车与车,车与路通信技术
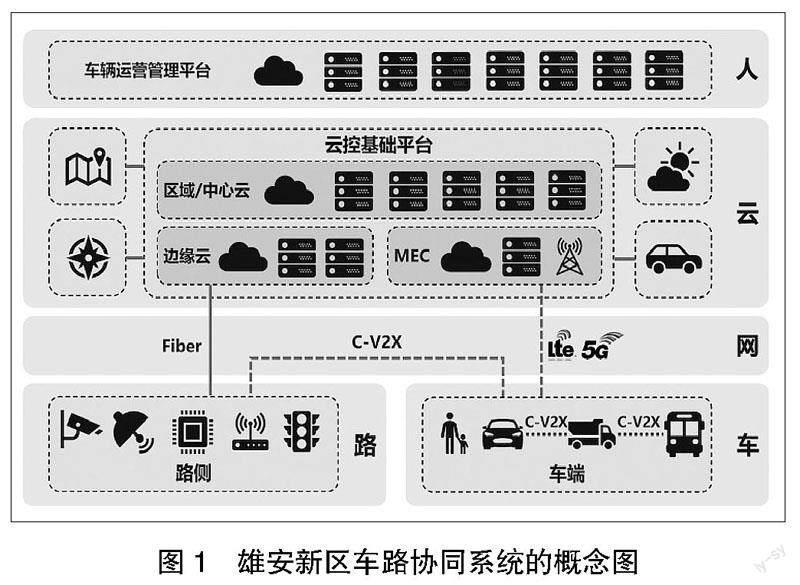
4G、近距离通信、WiFi等通信技术在车路协同系统中的应用可以有效保障车辆之间的信息互通。早在2009年,美国大学就已经成功研发出了车路协同驾驶实验平台,并命名为CVeT,引起了美国学者的关注。在国内,也早已经有相关的车路协同通信技术体系,例如图1所示的雄安新区车路协同系统。在此基础上,还可以构建面向“车路网云”的融合车路协作智慧交通应用技术体系,并构建智慧交通应用体系。这样,示范区中的网联车辆就能够安全、实时、可控地进行信息连通,为各种智慧服务的实验、试点和示范提供支持。同时,还可以对适合于新区的智慧交通新模式进行试用,取得显著的
成效。车车、车路通信主要基于现有的通信、网络和信息采集技术进行。例如,利用已有的无线网络技术和移动网络技术,结合设置在道路上的信息采集技术,以及安装在高速行驶的车辆上的信息接收技术,将收集到的信息进行转化和融合。最后,将最终的信息反馈给车辆驾驶员。这样,车辆与道路之间就能够展开可靠的信息沟通,并且获得准确的信息。
2.车路协同系统的交通安全技术
车路协同在保障道路交通安全方面起到了重要作用。当道路上行驶的车辆通过信息交互系统获取到实时信息后,能够准确定位道路上的其他车辆。当两辆车之间的距离小于安全距离时,系统会向两辆车发送预警信息,及时提醒驾驶员注意并采取措施以避免车辆相撞。此外,在道路交通量较大时,车路协同系统通过分析道路上车辆的位置信息,计算出车流量较少的车道,然后向驾驶员提供换道提示。这样可以保证车辆在大交通流中的行车安全性,同时最大程度地利用已有的道路资源,缓解交通拥堵。总的来说,车路协同系统通过信息交互和智能化技术,提高了道路交通的安全性和效率,為驾驶员提供了更加便捷和安全的出行环境。
3.车路协同的交通控制技术
在车路协同系统中,交通控制也是一项十分重要的技术。利用车路协同系统所收集到的信息,能够实时动态诱导道路交叉口的车辆,提前引导驾驶员控制车速,最大程度地减少交叉口等待通行时间。通过系统的控制技术,能够提升驾驶效率。控制技术还可以控制车辆安全距离,其作用类似于交通安全技术在系统中的应用。包括各种预警机制,当发现车辆存在安全距离过近时,发出预警。
二、车路协同系统现存问题及未来发展
(一)车路协同系统的现存问题探讨
从上述分析可以看出,车路协同系统在很大程度上依赖于车辆和车辆之间、车辆和道路之间快速、准确的信息交互,实现了车路协同。然而,在现有通信网络下,车辆与车辆、车与路之间无法快速、准确地进行信息交互,难以实现高速运行条件下的快速介入和快速、可靠的信息传输。而且,目前的路侧信息设备并未有规划建设,车辆在道路上行驶时,无法及时地实现对路侧设备信息的采集,无法与道路进行实时的信息交互。目前,道路上的车辆并非全部都能接收到这些信息,对于一些操作系统相对落后的车辆来说,无法实现这些信息的交互。
总体来说,车路协同系统的信息传输效率很低,主要是因为技术、基础设施、车辆等方面的原因。研究者们虽然提出了各种方法来提高信息交互的效率,但车路协同的效果却并不理想。此外,实现车辆的碰撞预警、自动刹车、车道偏离预警等功能还需要专门的团队来完成。
在5G技术条件下,通过物联网技术,人、车、路、环境将完全融合。在这样的技术条件下,车辆可以及时地获取道路信息,对道路上的突发情况做出快速地判断,并采取有效地应对措施。这将大大减少道路上的交通事故,给驾驶员带来更加安全地出行体验。因此,人们认为未来的汽车不仅仅是一台可以自主驾驶的机器,而是一台拥有情感与温暖的机器。
(二)车路协同系统的未来发展
为适应5G时代的发展趋势,更好地解决交通安全与效率问题,需要研究面向5G的智慧路边系统架构。
1.V2X通信技术
V2X通信指的是借助某种通信技术,使车辆与车辆、车辆与道路以及其他信息设备能够完成信息的交互。这种通信技术应具有较低的延时、较高的可靠性。目前主流的V2X通信技术包括以802.11p为基础的DSRC、以蜂窝通信为基础的LTE-V以及5G通信。DSRC技术体系已趋于稳定,LTE-V技术正在演进中,但因由于LTE-V技术可以平稳过渡到5G,所以LTE-V技术还有更大的发展空间。
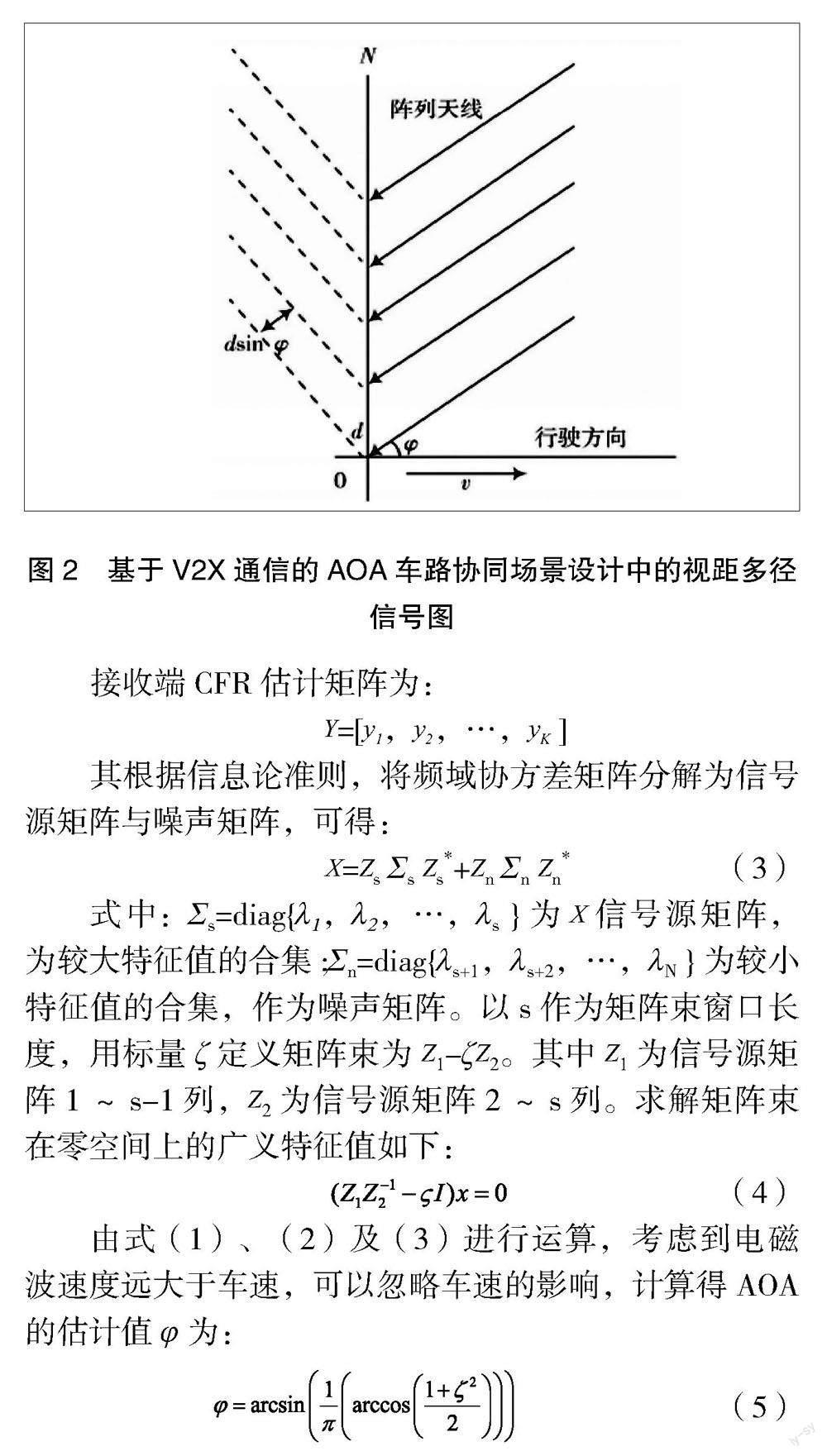
图2显示了通信车端的视距多径信号,其中N轴上为阵列天线排布,实线箭头表示接收信号。
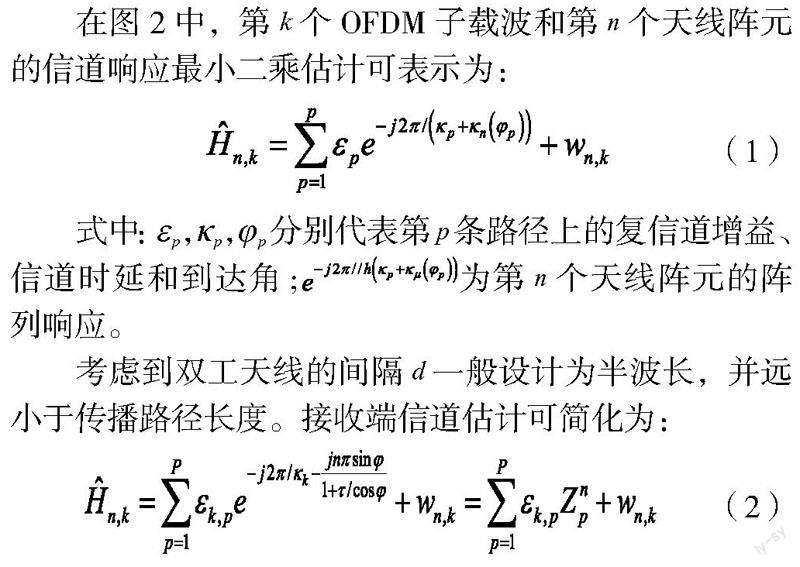
在图2中,第k个OFDM子载波和第n个天线阵元的信道响应最小二乘估计可表示为:
(1)
式中:εp,κp,φp分别代表第p条路径上的复信道增益、信道时延和到达角;为第n个天线阵元的阵列响应。
考虑到双工天线的间隔d一般设计为半波长,并远小于传播路径长度。接收端信道估计可简化为:
(2)
接收端CFR估计矩阵为:
Y=[y1,y2,…,yK ]
其根据信息论准则,将频域协方差矩阵分解为信号源矩阵与噪声矩阵,可得:
X=Zs Σs Zs*+Zn Σn Zn* (3)
式中:Σs=diag{λ1,λ2,…,λs }为X信号源矩阵,为较大特征值的合集;Σn=diag{λs+1,λs+2,…,λN }为较小特征值的合集,作为噪声矩阵。以s作为矩阵束窗口长度,用标量ζ定义矩阵束为Z1-ζZ2。其中Z1为信号源矩阵1~s-1列,Z2为信号源矩阵2~s列。求解矩阵束在零空间上的广义特征值如下:
(4)
由式(1)、(2)及(3)进行运算,考虑到电磁波速度远大于车速,可以忽略车速的影响,计算得AOA的估计值φ为:
(5)
2.高精度定位基地台
目前,大多数定位系统受限于技术水平,仅能达到米级的定位精度。然而,在5G技术的支持下,可利用其极低的信息传输延迟和高可靠性来跟踪卫星并获取实时数据。接着,将数据传输至移动基站,并通过基站对数据进行分析解算,从而获得流动车辆的准确位置,实现高精度的车辆定位。
3.高精度地图的发布
高精度地图指的是在常规地图上叠加更精细的道路参数图层和更实时的交通状态图层,也就是静态高精图层和动态高精图层。在5G技术的支持下,实现了高精度地图的发布。不同于传统地图,高精度地图采用局部地图动态更新方式,静态高精图层数据主要通过云端获取,而动态高精图层数据则需从邻近区域RSU获取最实时的数据。
由此可以看出,随着5G技术的发展,车路协同系统将能够很好地解决当前一些较难解决的难题。在5G环境下,车路协同系统将成为一个研究热点。
三、结束语
综上所述,目前车路协同系统尚处于发展阶段。随着5G技术的发展,车路协同系统的研究将会取得更大的进展。在未来的发展过程中,各种车载设备和道路所需设备将会更全面地建设起来,从而使车路协同系统更加完善。这将保证人、车、路和环境可以更快速、可靠地连接在一起,提供更智能化、安全化、舒适化的交通出行服务和驾驶体验。车路协同系统综合考虑了车辆、道路、行人和环境,将成为未来智能交通发展的重要方向。因此,研究车路协同系统是非常有意义和必要的。
作者单位:桑中山 景峻 李杰 张英潮 宋增磊
山东高速信息集团有限公司
参 考 文 献
[1]靳雯婷,白昀,付强,等.基于驾驶模拟技术的车路协同生态驾驶预警系统节能减排效果分析[J]. 交通节能与环保,2023,19(2):91-99.
[2]陈长浩. 城市道路车路协同系统解决方案的研究与应用[J]. 电子技术与软件工程, 2022,(24):161-165.
[3]丁飞,张楠,李升波,等. 智能网联车路云协同系统架构与关键技术研究综述[J]. 自动化学报,2022,48(12):2863-2885.
[4]严炎. 基于C-V2X的车路云协同系统架构及场景化部署方法研究[J]. 广东通信技术, 2022,42(12):35-39+43.
[5]荣少华,王松浩,欧阳波涛. 基于蜂窝车联网通信技术的智轨电车车路协同系统设计[J]. 控制与信息技术,2022,(06):56-61.
[6]郑玲玲. 智慧高速公路车路协同系统经济性分析[J]. 中国交通信息化,2022,(S1):25-27.
[7]李翠萍,赵鹏超,胡鑫,等. 车路协同V2X仿真验证系统设计[J]. 汽车与新动力, 2022,5(03):36-39.
桑中山(1974.02-),男,漢族,济南,山东高速信息集团有限公司工会主席,高级工程师,研究方向:高速公路信息化及监控、通信、收费三大系统的建设、运维;
景峻(1977.08-),男,汉族,济南,山东高速信息集团有限公司董事长,正高级工程师,研究方向:高速公路信息化,负责智慧高速建设方案总体设计、云收费系统研发,主导建设智能网联测试基地项目;
李杰(1980.06-),男,汉族,济南,山东高速信息集团有限公司总经理,高级工程师,研究方向:负责智慧高速科研与工程落地工作,推动山东省智慧高速建设,并依托工程项目开展标准制定、科研项目研发等一系列科技创新工作;
张英潮(1984.01-),男,汉族,济南,研究方向:负责项目经济可行性评价、项目资金管理;
宋增磊(1992.01-),男,汉族,济南,研究方向:负责项目经济评价。
猜你喜欢
今日农业(2021年8期)2021-11-28
今日农业(2021年13期)2021-11-26
现代畜牧科技(2021年3期)2021-07-21
落叶果树(2021年6期)2021-02-12
铁道通信信号(2018年7期)2018-08-29
现代园艺(2017年23期)2018-01-18
科技资讯(2016年19期)2016-11-15
法制博览(2016年11期)2016-11-14
商业会计(2016年15期)2016-10-21
科学与财富(2016年28期)2016-10-14
