
输气管道清管器运行速度研究*
2023-11-03 13:26杨宏伟刘方
油气田地面工程 2023年10期
杨宏伟 刘方
中海石油气电集团有限责任公司
管道输送天然气是目前业内达成共识的最为经济高效和安全的输送方式。为确保输气管道的安全、稳定、高效运行,定期对管道进行清污、除垢和检测等清管维护作业已成为必要的作业流程。决定管道清管作业成功与否的关键要素之一是清管器的运行速度,在满足规范且稳定运行的速度下,清管器清管效率最高,过高或过低的速度都不利于清管作业,甚至存在严重的安全隐患[1]。
清管器的驱动力来自管道输送介质前后压差的推动力,受管道内部杂质状态、管道沿线高程变化、管道自身运行压力及流量波动的影响,清管器的运行速度很难趋于稳定。对于长输天然气管道来说,若无法掌握、调节清管器运行速度,则必须采取相应措施才可进行清管作业,由此造成巨大的经济投入[2-3]。因此,清管器速度的提前预判与跟踪对于管道的清管维护作业尤为重要。
1 清管器运行速度研究进展
清管作业是指利用清管器对输气管道进行定期清管,是天然气管道投产和运行中的一项重要工作,分为常规清管和智能清管两种。常规清管通过发射清管器清除管道中的液态水、泥沙、污液、腐蚀产物和泡沫清管器碎片等,避免管道堵塞,降低摩阻损失,减少设备磨蚀。智能清管是指在常规清管的基础上利用变形检测器和漏磁腐蚀检测器全面了解管道内部情况,掌握管道内外金属缺失、变形情况,评价管线腐蚀状况[4-5]。
清管作业的质量取决于清管器的类型、控制运行的速度和推动介质的压力。通常,若想获得较好的清管效果,清管器在管道中应以接近恒定的速度运行[6],速度太快或太慢都不利于清管作业。目前,清管器样式很多,对清管器的性能、运行速度及所需的驱动压力的研究往往凭借经验,具有一定的不确定性[7]。国内对于天然气管道清管器的相关研究还处于发展阶段,业内采用的清管器运行速度计算方法主要有SY/T 5922—2012《天然气管道运行规范》(以下简称规范)推荐的公式估算、经验数值求解及模拟仿真三类。
1.1 标准规范推荐公式求解
清管器的速度采用以下公式估算[8]:
根据规范要求,普通清管作业清管器的运行速度宜控制在3.5~5 m/s。
1.2 建立模型数值求解
根据清管器在输气管道中运行过程的受力情况进行受力分析,列出清管器运行过程的守恒方程,通过边界条件的设置进行建模数值求解。由于这类方法对清管器的运行状态进行了简化,部分边界条件进行了理想化处理,因此计算结果的精确度与模型的复杂程度密切相关,且模型的适用性受限较大。部分研究学者结合工程实际提出了基于清管过程各影响因素的数值求解方法[9-16],但这些方法的普适性有待进一步的工程验证。
1.3 水力学软件仿真
采用成熟的具备清管器运行仿真模块的水力仿真软件对清管器运行过程进行全程仿真模拟[17-20],可以同时对清管器进行稳态及动态模拟,实现了清管器运行状态全过程仿真,使计算精度及效率大大提高。但该类方法需要提前对清管状态的运行工况进行输入,前期所需输入数据较为复杂,一旦模拟工况与实际工况不符,计算结果会与实际运行状态产生偏差。
2 清管器运行速度计算
鉴于清管器运行速度对清管效果的重要意义,根据规范推荐的清管器运行速度公式对某输气管线清管器运行速度进行估算,同时采用SPS 软件对相同运行工况下的清管器运行速度进行模拟仿真,最后结合现场清管监测数据对公式估算结果及仿真结果进行校核,校核结果可为现场清管作业提供指导。
2.1 规范推荐的公式估算
根据规范推荐的清管器运行速度估算公式(公式1)对某在役天然气外输管线清管过程中的清管器运行速度进行估算。
以某输气管道清管过程为例(图1)进行研究,该输气管道全长约98.02 km,沿线地势平坦,忽略高程差影响,外径406 mm,壁厚8.7 mm,管壁粗糙度0.03 mm,沿线设8 座阀室,发球站出站压力1.57 MPa,末站压力1.44 MPa,管线设计压力4 MPa,采用皮碗清管器(过盈量2%)进行清管作业。

图1 清管器清管路线示意图Fig.1 Schematic diagram of pigging route
通过将相关管道运行参数代入上述计算公式得到对应工况下不同管段清管器运行速度(表1),由于清管期间GD3 下游分输阀室及GD7 下游相应分输阀室有较为明显的不可中断用户气量下载,故GD2、GD3 与GD4~GD7 及GD8、GD9 清管器运行速度发生较大变化。

表1 各管段清管器平均运行速度估算Tab.1 Estimated average operating speed of pig in each pipe section m/s
2.2 SPS 仿真
2.2.1 清管器运行速度模拟工况简介
本文选取规范推荐公式就天然气外输管线相同运行工况进行清管器运行速度仿真计算。本算例气源气质组分见表2。

表2 气源气质组分Tab.2 Gas source components 摩尔分数/%
2.2.2 仿真模拟分析
通过参数设置、建模采用SPS 软件对该天然气外输管线清管器运行速度进行仿真计算,其运行速度仿真结果如表3 所示。

表3 各管段清管器运行速度软件仿真结果Tab.3 Software simulation results of pig operating speed in each pipe section m/s
由表3 可以看出,清管器在输气管道内的运行速度最大为4.5 m/s,稳定运行速度维持在1.5~3.0 m/s左右。
2.3 清管器运行速度现场监测
在输气管道清管作业现场对清管器运行速度进行监测,首先需要根据前期管道调研数据设置监测作业监听点,第一个监听点设置在发球站,最末一个监听点设置在收球站,在管线沿线的阀室、分输站点分别设置监听点,然后在相应监听点位置安装检测仪(磁感应指示器)。清管过程中,清管器发出后记录相应时间,根据管道运行情况,提前预判清管器理论到达各监听点的时间,监听点人员根据预判时间提前到位监听,在清管器通过监听点时记录清管器通过时间、地点等信息,然后结合管道基础数据计算输气管线各管段(以阀室、分输站点为界)清管器运行的平均速度,计算结果见表4。
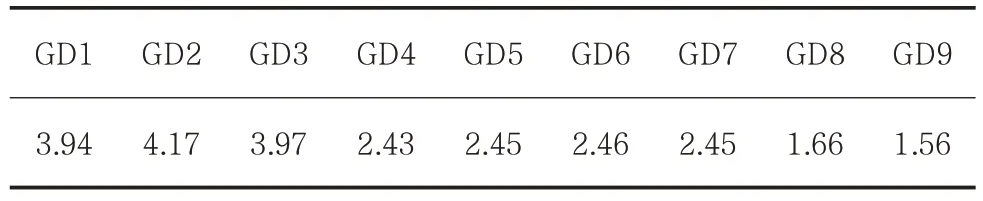
表4 各管段清管器平均运行速度现场监测结果Tab.4 On-site monitoring results of pig average operation speed in each pipe section m/s
2.4 结果对比分析
将不同方式计算得到的清管器运行速度与现场实际监测得到的结果进行对比汇总,结果见表5。
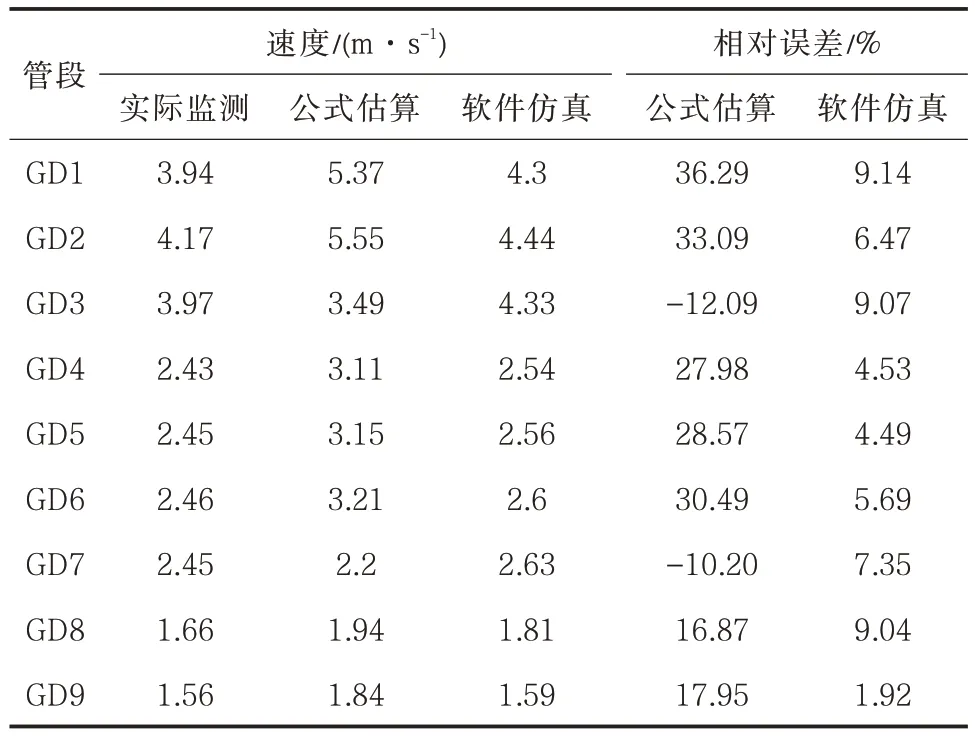
表5 不同方式计算得到的清管器运行速度Tab.5 Pig operating speed calculated by different methods
通过对上述计算结果进行横向对比分析发现,相同工况下,软件仿真计算得到的清管器运行速度都较规范推荐公式估算的速度更接近实际监测运行速度,SPS 软件仿真结果更为精确,且能够提供实时清管器的运行速度,规范推荐的清管器运行速度估算公式的结果仅可用于初步估算某段管线内清管器的平均运行速度,与实际运行速度偏差较大。实时掌握清管器的运行状态最为可靠的做法即在清管器内部安装信号发射器,通过实时定位清管器的位置掌握清管器的运行状态,提前为前方发出预警,做好清管器的收球及清污准备工作。
3 结论及建议
针对相同工况下的输气管线清管过程,对规范推荐公式估算法及SPS 软件模拟仿真法的清管器运行速度的计算及结果进行了对比分析。结果表明,SPS 软件仿真计算得到的清管器运行速度均较规范推荐公式估算结果更接近清管器实际监测运行速度,且SPS 软件的仿真结果能够提供清管器的实时运行速度,其结果与实际监测结果误差均在10%以内,满足现场工程需要。规范推荐公式估算结果仅可粗略预判输气管线内清管器的平均运行速度,工程实际参考意义不大,建议规范推荐估算公式仅在判断清管作业可行性的准备阶段使用,在制定详细清管作业方案过程中推荐采用软件仿真结果作为参考依据。上述方法对于清管器运行速度的计算仅是基于一种较为理想状态下的计算,旨在为清管作业提供参考。
猜你喜欢
油气田地面工程(2021年4期)2021-04-29
中国海上油气(2020年5期)2020-10-20
家庭影院技术(2020年6期)2020-07-27
石油石化节能(2019年3期)2019-04-03
中国化工贸易·上旬刊(2018年9期)2018-09-10
电子制作(2017年20期)2017-04-26
中国医学装备(2016年6期)2016-12-01
设备管理与维修(2015年2期)2015-12-25
海军航空大学学报(2015年3期)2015-11-11
化工管理(2014年29期)2014-08-15
