基于BP神经网络的轮胎花纹沟槽识别
2023-10-31 08:51李月芳王希波高岩飞马飞燕吕杭刘广奇
山东交通学院学报 2023年1期
李月芳 王希波 高岩飞 马飞燕 吕杭 刘广奇

摘要:针对传统轮胎花纹沟槽识别算法存在数据特征提取困难、数理运算步骤复杂等问题,基于BP神经网络对生成的不同沟槽类型的轮胎胎冠线数据集进行反复训练,得到BP神经网络轮胎花纹沟槽识别模型。将轮胎胎冠线数据集随机划分为训练集、验证集和测试集,通过试验验证BP神经网络识别模型对轮胎花纹沟槽的识别性能,由混淆矩阵得到模型的正确识别率为94.9%。从3、4沟槽轮胎中获取实际胎冠线样本数据测试BP神经网络识别模型的实际识别效果,6条胎冠线上的花纹沟槽数量全部识别正确。基于BP神经网络识别轮胎花纹沟槽数量具有可行性。
关键词:BP神经网络;轮胎胎冠线;轮胎花纹沟槽;识别
中图分类号:U463.341;TP391文献标志码:A文章编号:1672-0032(2023)01-0001-06
引用格式:李月芳,王希波,高岩飞,等.基于BP神经网络的轮胎花纹沟槽识别[J].山東交通学院学报,2023,31(1):1-6.
LI Yuefang,WANG Xibo,GAO Yanfei, et al. Groove recognition of tire tread based on BP neural network[J].Journal of Shandong Jiaotong University,2023,31(1):1-6.
0 引言
定期检测轮胎花纹深度对汽车轮胎保养、维修及避免交通事故具有重要作用[1-2]。轮胎花纹自动识别是非接触式轮胎花纹深度测量的难点,是实现自动检测技术的关键,但轮胎花纹纹理较复杂,识别较困难,影响轮胎花纹自动检测技术的发展[3-4]。国内外学者针对轮胎花纹深度检测提出了较多可行性方案:Huang等[5]提出了基于LabVIEW的立体视觉系统轮胎花纹沟槽识别方法,采用模糊C均值模型识别胎面和沟槽边界,该算法属于无监督学习,对噪声的抗干扰能力较差,且C值的选择对模型性能影响较大;Bhamare等[6]建立目标卷积神经网络和递归神经网络模型,使用10万张胎侧及胎面图片进行深度训练学习,识别轮胎花纹深度,该方法所需样本数量巨大,且没有进行试验验证;王希波等[7]为不同花纹的轮胎选取合适的高斯函数与轮胎外廓线卷积曲线,通过卷积曲线上的极大值点识别轮胎花纹,但选取高斯函数较复杂和困难;许利娟[8]根据像素点邻域内梯度先增大后减小的变化规律识别轮胎花纹沟槽,梯度绝对值之和大于阈值为沟槽点,但阈值的确定过程繁琐且无普适性;徐仕东等[9]通过协方差矩阵获取三维点云数据特征,采用欧式聚类进行点云分割寻找特征点,筛选凹陷区域,识别拐点即为轮胎沟槽最低点。上述识别算法提取特征过程繁杂、耗时,轮胎沟槽的识别准确度有限。
BP神经网络具有较强的数据表征能力和自适应学习能力,可对信息进行大规模并行处理,具有识别速度快、准确度高等优点[10-11]。针对传统轮胎花纹沟槽识别算法存在数据特征提取困难、数理运算步骤复杂等问题,本文基于BP神经网络,从生成的轮胎胎冠线数据集中学习规律、提取特征,训练并构建识别模型,以期实现轮胎花纹沟槽的智能识别。
1 数据集
有一定代表性和高品质的数据集是BP神经网络识别模型建立成功的关键[12]。本文生成的轮胎胎冠线数据集样本数量为401行×350列,共5类,分别代表有1~5个沟槽的5类胎冠线,每类随机生成不同沟槽深度和宽度的70条胎冠线,共有350条胎冠线信息,每条胎冠线有401个纵坐标数据。
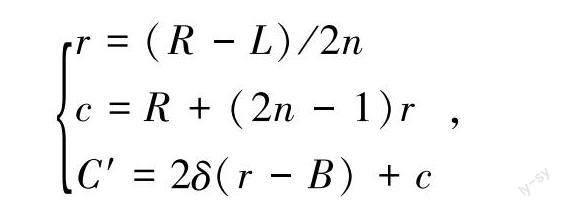
轮胎胎冠线数据集的生成方式为:1)生成光滑的胎冠线,确定沟槽在胎冠线上的位置范围;2)将胎冠线设置沟槽处划分为n(n=1,2,3,4,5)个模块,每个模块上设置1个沟槽。为防止沟槽处于模块分界处出现2个沟槽交叠或重合现象,定义每个沟槽中心线距模块边界的距离为B,通过以下公式确定沟槽在每个模块上的位置:
式中:r为模块1/2长度;L、R分别为胎冠线设置沟槽区域的左、右端点坐标;c为模块的中心位置坐标;C′为沟槽的中心坐标;δ为随机数,δ∈(-0.5,0.5)。
为增强BP神经网络的鲁棒性和容错性,提高网络识别性能,在数据集中模拟一些噪声[13],对生成的每条胎冠线纵坐标随机添加上、下波动幅值为0.008的干扰。对每条胎冠线数据即数据集的每1列进行归一化处理,使胎冠线的坐标范围为[-0.5,0.5],归一化公式为:
X′=Xi-A/Xmax-Xmin,
式中:X′为归一化后的数据,Xi为胎冠线的第i个坐标数据,A为胎冠线的坐标数据的中值,Xmax、Xmin分别为胎冠线坐标数据的最大值和最小值。
从生成的数据集中随机选取2~5沟槽的2条胎冠线如图1所示。
2 BP神经网络识别模型
2.1 BP神经网络拓扑结构
BP神经网络拓扑结构包括输入层、1层或多层隐藏层、输出层。每层由若干个神经元组成,接收上一层神经元信息处理并输出到下层神经元[14-16]。本文构建的BP神经网络模型如图2所示,包括输入层、1层隐藏层和输出层,输入层节点数为401,对应每条胎冠线的纵坐标数据,输出层有5个神经元,对应1~5沟槽胎冠线。
2.2 隐藏层节点数
隐藏层的节点数对BP神经网络识别模型训练效果有直接影响,节点数太少,网络性能差,复杂数据的训练误差大;节点数太多,易陷入局部优化而出现过度拟合现象。根据经验公式确定隐藏层节点数[17-19]
式中:g为输入层节点数;m为输出层节点数;β为任意整数,β∈[0,10]。
通过式(1)确定隐藏层节点数范围后,利用生成的数据集训练10次,统计G不同时对数据集中轮胎花纹沟槽的平均识别率,G为5、10、15、20、25、30、35时,平均识别率分别为69.81%、88.34%、89.80%、94.30%、93.46%、90.25%。节点数为20时,平均识别率最高,所以将隐藏层节点数设为20。
2.3 参数设置
神经元个数、隐藏层节点数和训练样本数对BP神经网络识别模型的识别效果有较大影响[20]。将轮胎胎冠线数据集随机划分为训练集、验证集和测试集,样本数分别占数据集的70%、15%、15%。BP神经网络识别模型参数设置如表1所示。模型训练达到期望误差、最大训练次数、验证样本的检查值3个条件中的任意1个条件时,训练结束。
3 BP神经网络识别模型训练及结果分析
3.1 BP神经网络识别模型训练过程
BP神经网络识别模型的计算过程分为前向传播算法和误差反向传播算法2部分。神经网络的输入层、隐藏层、输出层间通过前向传播算法与误差反向传播算法构成正反馈系统,进行轮胎花纹沟槽识别模型训练。
3.1.1 前向传播算法
神经网络第l层的输入
zl=wlal-1+bl,
式中:wl为第l-1层到第l层的权重矩阵,al-1为第l-1层神经元的输出,bl为第l-1层到第l层的偏置向量。
神经网络第l层的输出
al=fl(zl),
式中fl(zl)为第l层的激活函数。
wl和bl是BP神经网络的学习参数,zl随wl和bl的变化而动态变化。
3.1.2 误差反向传播算法
将样本(x,y)输入神经网络模型中,得到网络输出y′,其中x为输入值,y为输出标签。
根据链式法则及数学归纳法,第l层误差值δl可通过第l+1层误差值δl+1计算得出,公式为:
式中:L(y,y′)為度量损失的损失函数;fl′(zl)为fl(zl)的导数;⊙为Hadamard乘积,表示每个元素相乘。
BP神经网络的wl和bl的梯度表达式为:
前向传播算法在确定网络结构后,随机生成权重和偏置,权重和偏置在开始阶段一般设置为-1~1。将样本数据输入模型,通过激活函数进行非线性转换,对线性不可分数据进行分类,得到预测值。误差反向传播算法根据预测值与真实值的误差对权重和偏置更新,使误差最小,以优化模型。综上,通过前向传播算法与误差反向传播算法的循环迭代训练模型进行轮胎花纹沟槽的智能识别[21]。
3.2 BP神经网络识别模型训练结果分析
BP神经网络迭代次数为33时达到验证样本检查值,交叉熵损失趋于平稳,模型收敛,训练结束,训练误差为0.007 250。交叉熵损失的变化曲线如图3所示。由图3可知:神经网络在第27次训练时验证集网络性能达到最优,交叉熵损失为0.084 064。
混淆矩阵可评价BP神经网络识别模型的分类性能,直观表征每个类别的分类情况[22]。BP神经网络识别模型对轮胎花纹沟槽识别结果的混淆矩阵如图4所示,图中绿色方格中的数据为对轮胎花纹沟槽识别正确的个数,红色方格中的数据为识别错误的个数。
由图4可知:1沟槽的70条胎冠线中有69条胎冠线识别正确,有1条胎冠线被误判断为2沟槽,正确识别率为98.6%;2沟槽的70条胎冠线中有62条胎冠线识别正确,4条胎冠线被误判断为1沟槽,1条胎冠线被误判断为3沟槽,1条胎冠线被误判断为4沟槽,2条胎冠线被误判断为5沟槽,正确识别率为88.6%;3~5沟槽胎冠线的正确识别率分别为94.3%、94.3%、98.6%;模型整体的正确识别率为94.9%,说明采用BP神经网络识别模型从轮胎胎冠线中识别轮胎花纹沟槽可行。
3.3 泛化能力验证
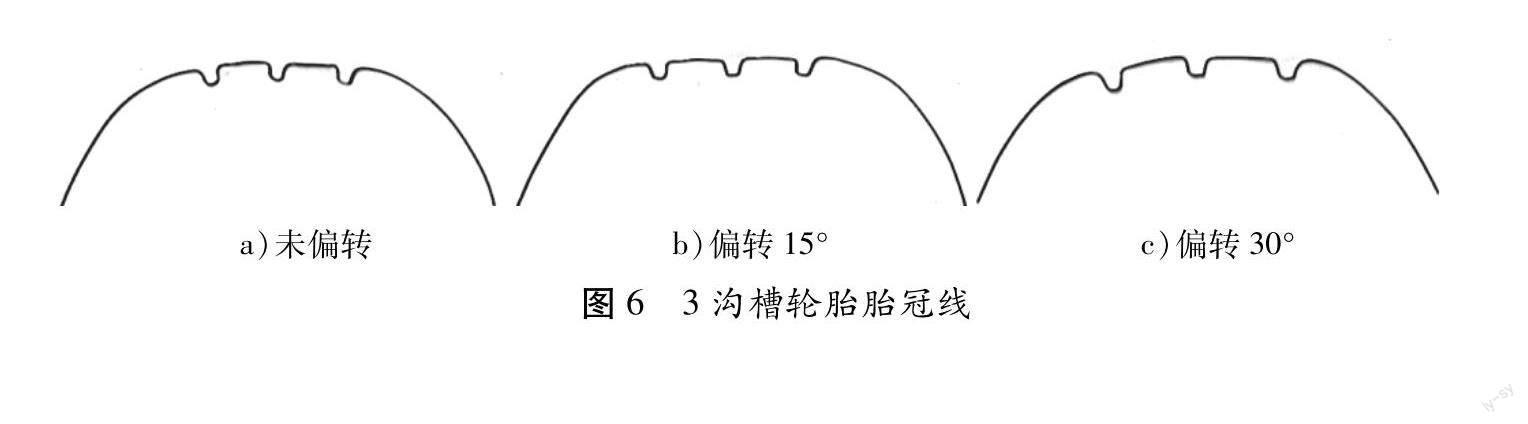
由于实际应用1、2、5沟槽轮胎较少,选取常见的3、4沟槽轮胎测试BP神经网络识别模型的实际识别效果,验证其对陌生样本数据的泛化能力。分别从3、4沟槽的轮胎中获取3条胎冠线数据,胎冠线获取位置如图5所示,Q、O点为轮胎胎冠线角度偏转中心。从轮胎上获取的胎冠线如图6、7所示。
从实际轮胎上获取的胎冠线样本数据维度需与建立的BP神经网络识别模型训练样本数据维度一致,对图6、7中6条胎冠线先进行数据拟合,再进行数据插值,以获得相同维度的样本数据,最后对数据进行归一化处理,使实际样本数据的坐标值范围为[-0.5,0.5]。BP神经网络识别模型对6条胎冠线上的沟槽数量全部识别正确,说明BP神经网络识别模型识别轮胎花纹沟槽的可行性与有效性。
4 结论
针对轮胎花纹沟槽识别困难、识别率低及识别算法复杂等问题,将BP神经网络应用于轮胎胎冠线识别中,为轮胎花纹沟槽识别方法提供了新思路。通过训练轮胎胎冠线数据集构建的轮胎花纹沟槽自动识别的BP神经网络识别模型,对轮胎花纹沟槽的正确识别率为94.9%。将BP神经网络识别模型应用于实际轮胎花纹沟槽识别中,6条胎冠线上的沟槽数量全部识别正确,说明本文构建的BP神经网络识别模型识别轮胎花纹沟槽的可行性与有效性。
参考文献:
[1]庞博维,崔敏,杨琨,等.轮胎胎面磨损检测技术研究进展[J].无损检测,2021,43(7):83-89.
PANG Bowei, CUI Min, YANG Kun, et al. Research development of tire tread wear detection technology[J].Nondestructive Testing, 2021,43(7):83-89.
[2]王泽.汽车轮胎胎面缺陷检测系统研究与实现[D].西安:西安工业大学,2021.
WANG Ze. Research and implementation of automobile tire tread detection system[D].Xi′an:Xi′an Technological University,2021.
[3]张帅.用于轮胎花纹分类的图像特征提取算法研究[D].西安:西安邮电大学,2019.
ZHANG Shuai. Study on feature extraction for tire tread pattern image classification[D].Xi′an:Xi′an University of Posts & Telecommunications,2019.
[4]艾玲梅,郭春.基于组合特征提取与多级SVM的轮胎花纹识别[J].计算机工程与应用,2013,49(20):179-182.
AI Lingmei, GUO Chun. Tire tread pattern recognition based on composite feature extraction and hierarchical support vector machine[J].Computer Engineering and Applications, 2013,49(20):179-182.
[5]HUANG S Y, CHEN Y C, WANG J K. Measurement of tire tread depth with image triangulation[C]//Proceedings of 2016 International Symposium on Computer, Consumer and Control.Xi′an, China:IEEE, 2016:303-306.
[6]BHAMARE H, KAMBLE N, KHACHANE A. Quality inspection of tire using deep learning based computer vision[J].International Journal of Engineering Research and Technology, 2019,8(11):701-705.
[7]王希波,李爱娟,高金胜,等.基于机器视觉的轮胎花纹深度测量系统研究[J].国外电子测量技术,2019,38(4):66-70.
WANG Xibo, LI Aijuan, GAO Jinsheng,et al. Study on tire tread depth measurement method based on machine vision[J].Foreign Electronic Measurement Technology,2019,38(4):66-70.
[8]許利娟.基于线结构光的轮胎磨损检测系统设计与实现[D].济南:山东交通学院,2021.
XU Lijuan. Design and implementtation of tire wear detection system based on linear structured light[D].Jinan:Shandong Jiaotong University,2021.
[9]徐仕东,毕远伟,孙海卫.基于多线激光的轮胎花纹深度测量方法研究[J].应用激光,2022,42(2):64-70.
XU Shidong, BI Yuanwei, SUN Haiwei.Tire tread depth measurement method based on multi-line laser[J].Applied Laser, 2022,42(2):64-70.
[10]AGGARWAL C C. Neural networks and deep learning[M].Berlin: Springer-Verlag, 2018.
[11]巩泽文.古叙矿区煤体及其组合的测井曲线识别技术[J].科学技术与工程,2019,19(20):77-84.
GONG Zewen. Logging curve identification technology of coal body and combination in Guxu mining area[J].Science Technology and Engineering,2019,19(20):77-84.
[12]KELE??GLU C, K?C?K H, DEMETG?L M. Fault diagnosis of bevel gears using neural pattern recognition and MLP neural network algorithms[J].International Journal of Precision Engineering and Manufacturing,2020,21(5):843-856.
[13]闫岩.基于BP神经网络的未爆物识别研究[D].长春:吉林大学,2015.
YAN Yan. Unexpioded ordnance recognition based on BP neural network[D].Changchun:Jilin University,2015.
[14]JOSELIN J, DINESH T, ASHIQ M. A review on neural networks[J].Journal of Trend in Scientific Research and Development, 2018,2(6):565-569.
[15]杨柳青青,储莫闲,刘必林,等.基于动量自适应BP神经网络的鸢乌贼模式识别[J].热带海洋学报,2021,40(6):102-110.
YANG Liuqinqing, CHU Moxian, LIU Bilin,et al. Pattern recognition of Sthenoteuthis oualaniensis based on BPNN about momentum and self-adaption[J].Journal of Tropical Oceanography, 2021,40(6):102-110.
[16]程鹏,谢小年.基于BP神经网络的Q-学习可变限速控制对拥堵路段交通流的优化[J].山东交通学院学报,2017,25(3):38-43.
CHENG Peng, XIE Xiaonian. Optimization for traffic flow of road congestion based on Q-learning VSL control of BP neural network[J].Journal of Shandong Jiaotong University,2017,25(3):38-43.
[17]BAI G X, XU T L. Coal mine safety evaluation based on machine learning: a BP neural network model[J].Comput Intell Neurosci, 2022:5233845.
[18]LIN Y J, CHEN X J. BP neural network learning algorithm and its software implementation[J].Applied Mechanics and Materials, 2014,513-517:738-741.
[19]LIU B X, HUANG Y H, WU X D, et al. A recognition method of license plate number based on BP neural network[J].Applied Mechanics and Materials, 2014,596:422-426.
[20]毛振宇,李方利,叶玉明,等.基于BP神经网络算法的电缆局部放电类型模式识别[J].机电信息,2019(27):20-22.
[21]WANG Y L, LIU Y, CHE S B. Research on pattern recognition based on BP neural network[J].Advanced Materials Research, 2011,282-283:161-164.
[22]CHAC?N J E. A close-up comparison of the misclassification error distance and the adjusted rand index for external clustering evaluation[J].British Journal of Mathematical and Statistical Psychology,2020,74(2):203-231.
Groove recognition of tire tread based on BP neural network
LI Yuefang, WANG Xibo*, GAO Yanfei, MA Feiyan, L? Hang, LIU Guangqi
School of Automotive Engineering, Shandong Jiaotong University, Jinan 250357, China.
Abstract:In view of difficult in data feature extraction and complex in mathematical operation steps for traditional groove recognition algorithm of tire tread, the data set of tire crown line for different groove types is repeatedly trained, and the groove recognition model of tire tread based on BP neural network is obtained. The data set of tire crown line is randomly divided into three groups: training set, verification set and test set. The performance of the BP neural network recognition model is verified by experimentation, and the recognition rate of the model obtained from the confusion matrix is 94.9%. The actual sample data of tire crown line is obtained from the tires with 3 and 4 groove, which tests the actual recognition effect of the BP neural network recognition model. All the tire treads with 6 tire crown lines can be correctly identified. It is feasible to complete the groove automatic recognition of tire treads based on BP neural network.
Keywords:BP neural network; tire crown line; tire groove; recognition
(責任编辑:郭守真)
猜你喜欢
现代经济信息(2016年27期)2016-12-16
东方法学(2016年6期)2016-11-28
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
现代园艺(2016年17期)2016-10-17
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04