
智能巡检系统在变电站中的应用
2023-10-30 01:57李陆伊张智翔
通信电源技术 2023年17期
李陆伊,张智翔
(国网陕西省电力有限公司汉中供电公司,陕西 汉中 723000)
1 智能巡检系统在变电站中的应用意义
1.1 精细化常规巡检工作
智能巡检机器人能够克服时间、天气等特殊因素的影响,对变电站进行合理化巡检。它们可以根据具体的工作需求进行周期性巡检,并对巡检目标进行拍照留存、检测分析、后台数据整理记录等操作[1]。在实现变电站全自动智能化管理时,智能巡检机器人的应用使常规工作得到更完善的处理,对于变电站工作具有很强的实际意义。智能机器人巡检常规运行如图1 所示。

图1 智能机器人巡检常规运行
1.2 智能检测分析
智能巡检系统具备识别技术,可以在巡检工作中对设备外部异常进行检测和数据分析整理。例如,实时检测设备躁动频率、温度高低异常,识别开关闸刀分合状态等。依托数据库对比数据要素,当设备出现异常时,系统能够自动识别并立即自动报警,从而降低变电站出现危险的概率,为相关设备提供故障数据分析和技术支持。
1.3 加强变电站整体性
智能巡检系统具有远程操作功能,能够进行一键式顺控操作。工作过程中,采用模式识别技术,自动识别设备位置,从而自动化校准、核对被控设备。依托智能化手段加强变电站整体统一性,有助于随时应对各种突发问题与特殊情况[2]。
2 变电站巡检系统功能
变电站智能巡检系统在实际应用中,通常采用分层式控制,包括基站控制系统和移动控制系统。
2.1 基站控制系统
2.1.1 机器人遥控
在智能巡检机器人运行巡检工作中,相关操作人员只需在基站中通过键盘或鼠标等简单操作,便可实现对机器人的远程行驶遥控和摄像机调焦等操作。
2.1.2 自动巡检
操作人员可以通过后台输入数据,设定智能巡检机器人在特定时间自动进行巡检、执行指定任务。在工作过程中,机器人不仅能进行数据采集、分析、记录,还能借助自动红外线热像仪、云台等设备实现多种指定性操作。这些功能有效减少工作人员的任务量,提高整体工作效率[3]。
2.1.3 实时监控图像数据
无论是白天还是黑夜,智能巡检机器人都能通过可见光摄像机和红外线热像仪进行实时监控。工作人员只需在后台进行操作,即可获取变电站的各种实时信息,方便开展巡视与监督工作,并获取检测数据的详细记录。
2.1.4 机器人状况信息显示
工作人员在后台监测过程中,可以根据机器人反馈的信息和相关数据随时了解其运行状态,既能随时定位机器人,又能精确地对其进行操作控制,从而高效应对各种突发状态。
2.1.5 变电站数据存储分析
智能巡检机器人在实际工作中,通过数据库存储功能记录巡检过程中的电子地图信息、任务管理指令等数据。同时,它还能自动分析这些数据,不仅有助于未来对相关指令和任务的信息查询,还能够为日后的数据分析提供良好的支持与保障[4]。
2.2 移动控制系统
2.2.1 导航定位系统
导航定位系统由导航传感器和定位传感器2 个要素组成。导航传感器依托磁导航系统跟踪地面运行轨迹和范围,从而完成定位目的。而定位传感器则利用射频识别功能为机器人提供定位、停靠位置、规避等方面的信息[5]。
2.2.2 运动控制系统
运动控制系统是智能巡检机器人运行系统中的重要组成部分,为机器人提供持续的动力,从行驶路线、驱动电力以及运动行进等方面实现机械运动控制。
2.2.3 动力系统
机器人的动力系统主要保证其基本运行能力。此外,电力系统也为机器人电池提供充足有效的电量分配保障[6]。
2.2.4 采集检测系统
移动控制系统的主要工作任务是为机器人摄像机和红外线热成像仪提供设备采集和数据动能基础。随后,对这些数据进行整理和分析。通过基站系统云端数据的计算和主控计算机系统的协调配合,机器人能够实现检测数据的采集和传输,并通过云台、摄像机等设备的控制管理功能实现高效的移动控制。
3 智能巡检系统优缺点
3.1 优 点
智能巡检机器人系统在变电站中实际应用后,即使在高温、雷雨、大风等特殊天气条件下也能发挥作用,顺利完成巡检工作[7]。变电站巡检工作一般非常烦琐复杂,利用巡检机器人不仅能最大限度减轻巡检工作人员的压力与工作任务,还能在恶劣天气条件下代替人工完成巡检任务,确保变电站巡检任务正常进行。传统的电力巡检系统采用人工监测和维修方式,由于工作人员之间的工作习惯和方式不同,可能会导致故障分类和分析数据存在误差,不利于数据汇总和综合分析工作。应用智能巡检系统可改变这种情况,实现检测数据的标准化和统一化管理,使所有检修人员都能充分理解并应用这些数据,有助于提升变电站整体巡检的质量和水平。
此外,智能巡检机器人还具备人脸识别和危险区域识别功能。变电站区域属于特殊环境,不允许随意出入。通过采集并记录变电站工作人员的面部信息,巡检机器人在日常工作中可以与数据库比对,一旦发现陌生人,就会判定为特殊情况并迅速报警,从而避免非法人员进入变电站造成危险影响。同时,由于变电站存在一定的危险区域,在指定位置作业时,巡检机器人可以实时监控,针对区域外作业人员的行为进行判断分析,根据情况发出安全警报,从而保证作业人员的人身安全[8]。
3.2 缺 点
变电站智能机器人巡检过程中,磁轨道系统存在一些问题,需要进一步完善和优化。日常巡检路径规划的限制会使机器人巡检轨迹受到影响,从而无法对特定的检测目标进行全面、具体的有效监测,使巡检工作存在漏洞。
4 智能巡检系统在变电站中的实际应用
4.1 智能巡检机器人应用系统框架
变电站智能巡检机器人应用系统主要包括远程操作控制、本地操作控制、车辆运动3 个组成部分。工作人员通过操作台对智能巡检机器人终端进行远程控制与操作。工作站中安装相应的控制和接收系统,有助于在检测区域内构建覆盖范围较广的无线网络,并实现双向数据交互[9]。此外,本地控制台通过远程控制终端和硬件防火墙将运维网与机器人专用网络连接起来,构建全面、系统的智能巡检机器人应用系统框架,在实际应用过程中能够起到很大的作用。
4.2 智能巡检机器人无线网络设施
根据变电站实际区域大小和正常情况下无线网络的覆盖范围,可以将无线电网络覆盖范围设置一个或多个接入点。同时,智能控制系统将工业无线接入方式变为客户端接入,从而使机器人连接网络的相关设备可以直接通过客户端与现场无线网进行连接。此外,应用无缝漫游网络功能,将巡逻工作中的智能机器人多个接入点组合为无线网络系统,使巡检机器人的移动不再受网络切换的影响和限制[10]。
4.3 智能巡检机器人系统技术应用
智能巡检机器人容易受到运动控制与导航对接等因素的影响,难以实现高效的目标瞄准。将巡检机器人与位置控制系统相融合,并使用模式识别系统进行操作计算,将目标分离,从而实现精准定位。这样能够充分保证监控数据的准确性与应用性,为设备实际运行提供有力的数据支持与信息来源。
4.4 三维电子地图
智能巡检系统在实际应用中需要其他科技手段提高其性能与相关操作。例如,使用三维电子地图构建虚拟变电站仿真模型,可以帮助解决二维地图使用过程中存在的缺陷,以实现巡逻地点的精准定位。变电站三维电子地图应用方法与流程如图2 所示。
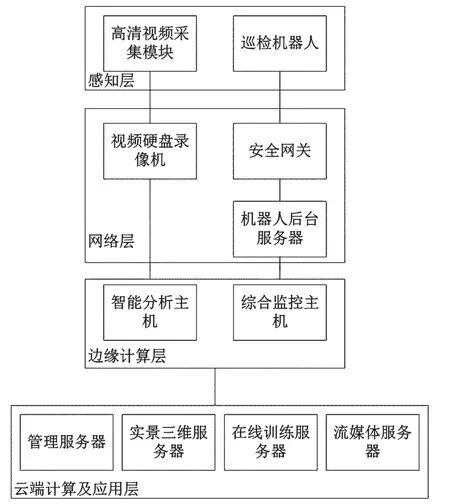
图2 变电站三维电子地图应用方法与流程
4.5 智能巡检机器人的网络安全防护
智能巡检系统的网络安全性非常重要,关系到变电站的正常平稳运行与实际应用。由于机器人采用无线网络连接,无法实现物理阻断,出现故障问题时无法有效切断网络传输。为确保巡检机器人系统在受到损伤或其他情况下依能保证网络安全,需要设计一个专用的机器人安全系统。对此,本地控制终端的无线接入点可采用WPA2 安全模式,确保无线网络在平稳运行状态下的安全性。同时,本地控制端使用路由器能防范来自网络上的系统侵入攻击,提供攻击防范技术手段,内置的高性能防火墙可以防范并阻止大部分网络攻击,从而保障本地控制端的安全。
本地服务后台通过嵌入式子系统交互也受到防火墙保护,对不符合相关协议的数据信息加以阻断隔离,使攻击者即便采用改变IP 地址等方式也不能通过防火墙安全验证,从而进行高效保护。服务站后台与本地控制端还通过与硬件防火墙连接,对网络通信安全进行进一步防护。当智能巡检机器人在网络交互中检测到异常时,远程集中控制终端与本地控制终端会同时收到信息,并迅速弹出窗口进行报警。
5 结 论
变电站电力系统自身结构较为复杂,给工作人员的相关工作带来较大的挑战,采用更科学有效的方式强化巡检任务刻不容缓。智能巡检系统的应用能够有效优化当前变电站巡检任务,通过现代技术进行详细检测与分析控制,最大限度减少人力与物力成本,使变电站巡检更加标准化、具体化、智能化。
猜你喜欢
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
现代工业经济和信息化(2016年5期)2016-05-17
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
