
葡萄清土扒藤机械化技术研究现状与展望
2023-10-27 03:20韩大龙王治民
新疆农机化 2023年5期
宋 龙,周 艳※,何 磊,韩大龙,张 景,朱 贺,王治民,卢 雨
(1.新疆农垦科学院机械装备研究所,新疆 石河子 832000;2.石河子大学机械电气工程学院)
0 引言
葡萄做为我国特色水果产品之一[1],在我国广泛种植。根据国际葡萄与葡萄酒组织发布的统计资料,2020 年全球葡萄种植总面积约为730万hm2,中国葡萄种植面积约为78.5 万hm2,较2019 年增长0.6%,总种植面积居世界第三,仅次于西班牙和法国[2]。葡萄的种植分布受自然条件影响明显,多集中在西北、华北等北纬35°~45°区域[3],栽植模式多为露天,因此当寒冷干燥的冬季来临之前,为了避免葡萄藤出现风干或冻伤现象,农户一般先将修剪后的葡萄藤下架并埋入土中,待第二年春季天气回暖时再将其出土上架以保证安全过冬。冬季埋土防寒和春季出土是葡萄园管理的重要环节,其工作量约占葡萄园管理的30%[4]。目前我国大部分葡萄种植地区冬季防寒仍以人工埋藤为主,机械化程度较低[5-6],有着作业时间跨度短、作业量大、劳动强度高、效率低且易伤藤的特点。另外,由于劳动力短缺,人工成本逐年上涨,这些因素不仅制约着葡萄产业化的发展,而且降低了葡萄种植户的收入[7],因此,实现北方葡萄春季清土的机械化作业对中国葡萄产业化发展和提高葡萄种植户收入具有重要意义[8]。本文针对我国北方葡萄种植模式中春季清土扒藤作业环节,通过对近年来国内外葡萄清土扒藤机的清土部件及避障装置研究现状进行介绍并进行分析和比对,总结出目前葡萄清土机械存在的问题,提出对未来葡萄清土扒藤机械的展望并提出采用测距雷达(传感器)、PLC 及伺服电缸设计一种非接触式电控自动避障装置,为自动避障技术在葡萄清土扒藤作业中的应用提出新的思路,以促进葡萄春季清土扒藤机械化水平。
1 葡萄扒藤机的发展现状
在国外,葡萄主产国主要集中在温带及亚热带全年气候温和的区域,如法国、意大利和美国等地区,因此在冬季不需要进行冬季埋藤和春季清土起藤作业,故未见国外与埋藤或者清土相关的农业机械和相关研究[9]。
在国内,由于我国葡萄产业发展较晚,因此对相关配套机械的研究还处于探索阶段,虽然冬季埋藤已基本实现机械化,但是春季清土起藤仍以人工为主,机械化程度较低。目前国内设计的葡萄清土扒藤机种类较多,按照工作方式可以分为单边式和双边式;按照机具作业位置可以分为垄上作业和垄行作业;按照清土装置是否与土壤接触可以分为接触式和非接触式[10],此外还有回收彩条布清土机[11]。总之,葡萄清土起藤机械的重要组成部分还是以动力装置、扒土装置及自动避障装置为主。其中动力装置一般以拖拉机为主,动力一般为15~32kW。清土扒藤装置分为往复(刮板)式、回转(叶轮或刷子)式、绞龙式和链铲式等,自动避障装置则是以触杆、传感器、液压换向阀和电磁阀为主。从机具的实际使用来看,虽然清土扒藤机械种类繁多,但影响机具工作效率的主要部件还是清土装置和自动避障装置,下面对接触式和非接触式清土扒藤装置的发展现状进行研究与分析。
目前非接触式清土扒藤装置主要以气吹式为主。江苏大学的杨启志等[12]设计了一种气吹旋抛复合式葡萄藤清土起藤装置及清土机,依靠旋抛和风力清土,结构如图1。
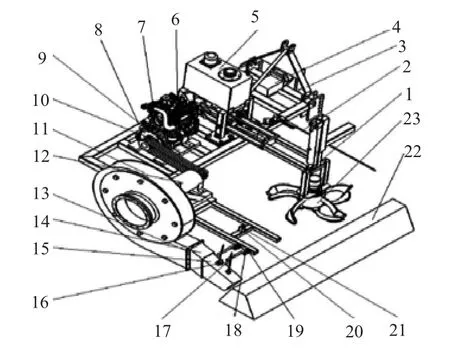
图1 气吹旋抛复合式葡萄藤扒土机
该机由机架、旋抛装置、避障装置、风力清土装置、传感器、风口调整装置和控制单元组成。其清土部件采用气吹和旋抛组合方式,该机可根据现场作业环境调节旋抛装置的伸缩及风管口的角度,作业不伤藤但该机仅适用于覆土量少和沙性土质的环境,由于该机使用气吹方式,因此现场作业环境差,目前该机仅处于试验阶段。
而对于接触式清土装置的研究,清土部件主要以刮板、绞龙、刮板+叶轮+绞龙及刮刷组合式这4种类型为主。
宁夏工商职业技术学院曾保宁等[13]研制的针对宁夏葡萄种植模式的葡萄起藤机机构如图2。该机器由左右铲土犁、左右刮土板、前后梁、左右边梁和悬挂架组成。主要清土部件为刮板,其优点是结构简单、制造成本低、作业效率高,缺点是适用范围仅限于宁夏葡萄种植模式,清土不彻底,需要人工进行二次作业。

图2 葡萄起藤机
中国农业科学院果树研究所王志强等[14]研制的以绞龙为关键清土部件的前置式防寒土葡萄扒藤机如图3。该机主要由机架、传动机构、清土绞龙部件、平地绞龙部件及避障探头部件组成,主要清土部件为绞龙,该机出土量大且能将清除的葡萄藤防寒土均匀地平铺到行间,但绞龙为刚性体,在作业过程中容易损伤土壤中的葡萄藤。

图3 前置式防寒土葡萄扒藤清土机
中国农业大学马帅等[15]人研制的自动避障式葡萄藤防寒土清土机如图4。该机主要由机架、避障摆动机构、避障信号采集机构、控制器、清土部件、挡土板、传动部件和限深轮等组成。主要清土部件为刮板+叶轮+绞龙,该机仅适用于防寒土埋在水泥柱单侧的情况,若防寒土埋在水泥柱两侧,水泥柱位于土垄中间,则水泥柱中间的土壤不能被有效清除。

图4 自动避障式葡萄藤防寒土清土机
中国农业大学马帅等[16]研制的刮刷组合式葡萄藤防寒土清土机如图5。该机主要由机架、刮土板部件、叶轮部件、柔性刷子部件、液压系统和控制系统等构成,主要清土部件为刮刷组合式,其特点是机具具有自动调平系统,可提高机具的适应性、清土率可降低对葡萄藤的损伤率。
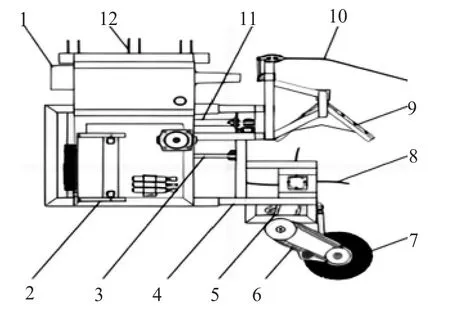
图5 刮刷组合式葡萄藤防寒土清土机
2 葡萄清土扒藤机自动避障装置研究现状
随着葡萄清土扒藤机的不断更新迭代,自动避障装置逐渐成为了其重要的组成部分,对机具工作效率的提高具有重要作用,因此自动避障装置的研究及改进始终是萄清土扒藤机研发的一个重要内容。葡萄清土扒藤机自动避障装置主要由触杆、传感器、电磁阀和液压换向阀构成,其工作过程为:当避障触杆未碰触到水泥柱或障碍物时,避障装置不工作,扒土装置进行正常扒土作业;当避障装置触碰到水泥柱或障碍物时,扒土装置开始由避障装置控制改变作业路径,使扒土装置能顺利避开水泥柱或障碍物;当避障装置与水泥柱或障碍物分离后,扒土装置复位,进行正常扒土作业,以此往复循环。究其根本葡萄自动避障清土扒藤机通过自动避障装置改变扒土装置的作业路径,从而使水泥柱或障碍物之间的防寒土清理更彻底,极大提高了机械效率、降低了人工工作量,节省了劳动力成本。
目前,此类自动避障装置已经成为果园机械的主要组成部分。该装置的设计虽然巧妙,但是过度依赖触杆的触发效果,因而对触杆的制作材料、障碍物的形状及软硬度有一定适用限制,同时对传感器的灵敏度及信号的采集也有较高的要求。因此,高效的自动避障装置的研究对果园类机械的发展有着重要的意义。
在国外,对避障装置的研究主要集中在果园除草机上。丹麦的Norremark[17]和西班牙的Pérez-Ruiz[18]等人将计算机视觉技术、GPS定位技术及光电传感器应用到了株间除草机械的自动避障控制系统中。
美国Cordill等[19]通过对玉米株间自动避障除草机进行试验,验证了光电传感器在避障除草装置中的实用性。这些技术的应用改善了除草效果且降低了伤苗率,但成本较高、效率较低。除此之外,意大利NARDI的机械式带自动避障的株间锄草机还使用了三位四通换向阀。
在国内,自动避障装置的研究起步较晚,江苏大学、华南农业大学及中国农业大学将图像识别技术与一些非接触传感技术应用到了自动避障控制系统中,取得了较好效果,但图像识别技术硬件成本高,且在复杂作业环境下图像处理算法复杂,处理时间长,效率较低。
中国农业大学徐丽明等[20]设计的以平行四连杆+触杆为关键部件的避障装置如图6。该避障装置通过将触杆与障碍物之间的接触压力转化成控制信号控制油缸伸缩实现自动避障。该装置缺点是触杆在接触过程中易变形,导致信号无法采集或持续存在。
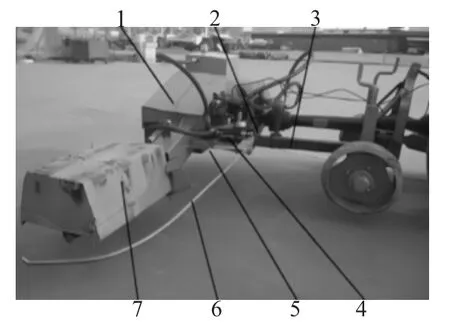
图6 平行四连杆+触杆的避障装置
中国农业大学马帅等[21]设计了传感器+STM32 单片机+触杆的避障装置(图7)。该避障装置利用传感器采集位移信号,然后通过STM32 单片机对信号进行分析,达到对避障油缸的控制,从而实现机具自动避障功能。缺点是触杆在接触过程中易变形,导致信号采集失败,另外杂草和细树枝也容易造成信号采集误差,导致油缸伸缩不到位。
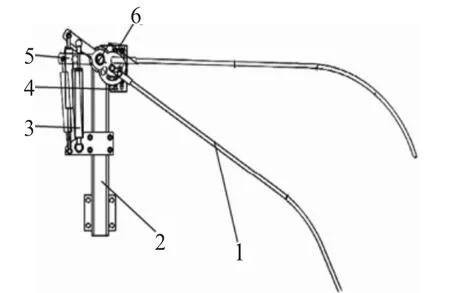
图7 传感器+STM32 单片机+触杆的避障装置
石河子大学朱站伟等[22]设计了一种三位四通液压换向阀+触杆的避障装置(图8)。该避障装置设计理念和NARDI相同,当触杆碰触到障碍物时拉动三位四通液压换向阀改变液压流向,使避障油缸工作,实现自动避障。该机结构简单、易调节,但三位四通液压换向阀有中间位置,造成避障响应时间过长,导致漏空距离长,当机具行进速度过快时漏空距离更长,且该避障装置适用于坚硬的障碍物,若障碍物为柔软类,则避障效果不明显。
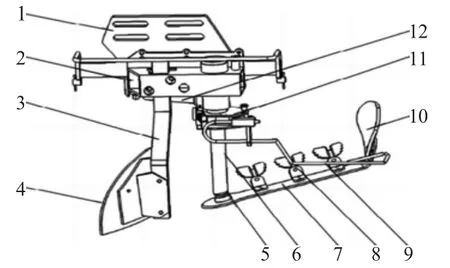
图8 三位四通液压换向阀+触杆的避障装置
3 存在的问题与展望
3.1 存在的问题
近年来,随着葡萄产业的升级发展,各式各样的葡萄清土扒藤机涌现出来,在一定程度上解决了葡萄清土扒藤劳动力短缺、劳动强度大、作业时间紧迫等问题,但从上文叙述的以刮板、绞龙、刮板+叶轮+绞龙、刮刷组合式为关键清土部件的4种机具类型来看,各类型机具在进行清土扒藤作业时都存在亟待考虑和改善的制约因素。
(1)葡萄园使用的埋藤机具不统一加上土壤环境的影响造成葡萄行间不平整、埋藤土垄高度不一致,使得扒藤机械无法平稳工作,导致清土不彻底、伤藤,影响扒藤机械工作效率。
(2)葡萄园的建设不标准,大功率机械无法进入,因此清土扒藤机械一般都选择较小功率驱动,导致扒藤机械功率不足,当埋藤土垄过厚时机具无法正常工作。
(3)葡萄藤都埋于水泥柱之间,扒藤机械无高效的自动避障装置,扒藤作业效率低。
(4)清土扒藤机械采用的避障装置对避障触杆的依赖性强且避障后漏空距离大,当清土扒藤机械行进速度过快时会导致漏空距离更大。
(5)目前所有的清土扒藤机械的自动化和智能化程度都较低,作业时都需要人工辅助。
3.2 展望
结合葡萄清土扒藤机械在使用过程中碰到的问题,要彻底解决扒藤机械自动化程度低、效率低及易伤藤等问题总的来说还要从农机与农艺的融合角度综合考量。
在农艺方面,加大葡萄标准园建设及改建和园区作业机具的标准化使用以及操作工人的培训,做好园区行间的平整,便于大功率机械进入,埋藤土垄高度一致,为后续扒藤作业做好铺垫。
在农机方面,加大对高效自动避障装置的研发。上述清土扒藤机械自动避障装置都是先采用触杆与障碍物接触,然后再进行避障,这就很依赖触杆的触发效果。高效稳定的避障装置是清土扒藤机械高质量清土作业及智能化的核心,因此,为摆脱对触杆的依赖,可设计一种非接触式电控自动避障装置,利用测距雷达和伺服电缸代替触杆和液压油缸,通过PLC 控制避障过程的实施,在体现节能环保的同时实现扒藤机械高效化和智能化。
4 结论
从葡萄的整个生产管理来看,葡萄春季扒藤作业是整个生产管理过程中机械化程度最低、劳动强度最大的环节。本文阐述了目前葡萄藤春季扒藤机及关键部件避障装置的发展现状,通过对不同关键部件的对比,总结了各种机型的特点,研制高效稳定的智能化避障装置是葡萄清土扒藤机械化、智能化发展的重要因素。总之,葡萄扒藤机械化的发展离不开农机与农艺的融合,最关键的是还要与先进的智能装备结合,只有二者紧密结合,葡萄扒藤机械才有更大的发展空间,才能更好地促进葡萄产业化的发展。
猜你喜欢
作文大王·低年级(2020年12期)2020-12-31
阅读(低年级)(2020年11期)2020-12-28
女报(2020年10期)2020-11-23
制造技术与机床(2018年9期)2018-09-19
海外华文教育(2017年6期)2017-08-07
水电站机电技术(2016年1期)2016-02-28
语数外学习·上旬(2013年7期)2013-09-29
读者(2012年16期)2012-05-30
物理与工程(2011年5期)2011-03-25
学与玩(2009年10期)2009-11-02
