
悬挂式定尺结构改进与应用
2023-10-26 11:35孙国栋
设备管理与维修 2023年17期
孙国栋
(凌源钢铁股份有限公司,辽宁朝阳 122500)
1 现有定尺机存在的不足
悬挂式定尺机原设计的行走滚轮有8 个,以梁的轨道为分界,滚轮分别分布在梁的轨道上、下各4 个(图1)。由于悬挂式定尺机质量大,在进行齐头时受冲击力也大,容易造成定尺机的偏斜,因此在梁轨道上的4 个行走滚轮都是有定位的,然而悬挂式定尺机的结构特点决定了它的受力情况,应用挡板撞击齐头时受到一个很大的撞击力,使在悬挂式定尺机的1 组有定位的2 个滚轮与轨道接触点处产生很大的瞬时冲击。
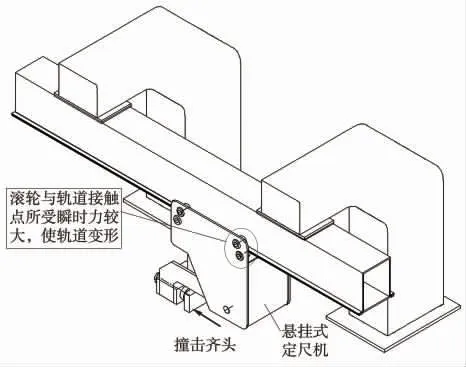
图1 原设计悬挂式定尺机结构
在频繁使用的定尺长度位置,轨道因为反复受冲击力的作用,导致这段轨道变形下凹。变形超过滚轮直径的1/4 后,滚轮就容易陷在其中,导致悬挂式定尺机出现无法行走的情况。
虽然梁上的轨道是焊接的,磨损后可以更换,但是受结构和尺寸的限制,轨道的强度相对较弱。而梁上的轨道一旦变形就只能整体更换,梁段尺寸大、质量大、维修过程危险系数大,工程量也较大,增加了维修维护成本和备件成本。
2 缺陷分析
现场应用的悬挂式定尺机结构如图2 所示,悬挂式定尺机在梁上行走,可以灵活的改变定尺长度,而悬挂式定尺机上的挡板可以进行齐头,挡板的升降是靠液压缸,靠滚轮的支撑和内部齿轮齿条副带动悬挂式定尺机的行走。确定定尺长度后,为了避免在齐头时悬臂式定尺机移动,靠锁紧机构进行锁死。

图2 现场应用的悬挂式定尺机结构
机构的受力分析如图3 所示,应用挡板撞击齐头时,撞击力Fc在C 点处分解为瞬时力Fa和瞬时力Fb,Fb1是Fb在B 点垂直方向的分力,Fa1是Fa在A 点垂直方向的分力,FA是A 点的支撑反力,FB是B 点的支撑反力,由于锁紧机构受约束作用,所以O点可以视作是固定点,因此整个受力体系可以视作是简支梁的受力体系,已知:Fa、Fb、FA、FB、Fa1小于FA和Fb1,具体计算如下:

图3 机构受力分析
在A 点处的合力情况是FA-Fa1,相对于O 点在A 点产生的转矩是(FA-Fa1)×L2。
在B 点处的合力情况是FB+Fb1,相对于O 点在B 点处产生的转矩是(FB-Fb1)×L1。
以向下为正方向,在A 点处的附加转矩是(FB-Fb1)×L1-(FAFa1)×L2>0,所受的转矩是向下的。
总结:虽然在A 点处受合力方向是垂直向上的,但是产生的附加转矩是向下的,由于滚轮于轨道是线接触,而每次撞击产生的瞬时力在线接触处反复作用,使A 点处反复受力,产生应力集中而导致轨道局部的疲劳变形,轨道变形下凹。变形量一旦超过滚轮直径的1/4,滚轮就容易陷在其中,导致悬挂式定尺机无法行走的情况。
3 改进措施
改进后的受力分析及结构如图4 所示,增加1 组无定位的滚轮,与现有技术方案中有定位的滚轮保持足够的距离,因为两处滚轮的距离足够短,所以相较于现有技术方案中,瞬时力的作用点可以看作是两条作用线间的区域(AD 间的距离),因此两个滚轮共同作用,相当于增加了受力面,避免应力集中使一处反复受力的情况。已知:增加一组滚轮后的受力情况是,撞击力Fc在C 点处分解为瞬时力Fa′、瞬时力Fb和Fd,Fb1是Fb在B 点垂直方向的分力,Fa2是Fa′在A 点垂直方向的分力,FA是A 点的支撑反力,FB是B 点的支撑反力,FD是D 点的支撑反力,由于锁紧机构受约束作用,因此O 点可以视作是固定点,那么整个受力体系可视作是简支梁的受力体系,Fa′小于Fa、Fa2小于Fa1、Fd1大于Fa2,具体计算如下:

图4 改进后的受力分析及结构
在A 点处的合力情况是FA-Fa2,相对于O 点所受转矩是(FAFa2)×L2。
在D 点处的合力情况是FD-Fd,相对于O 点所受转矩是(FDFd1)×L3。
在B 点处的合力情况是FB+Fb1,相对于O 点在B 点处产生的转矩是(FB-Fb1)×L1。
而(FD-Fd1)×L3>(FA-Fa2)×L2,且方向相同,均向上。
综上可得,[(FA-Fa2)×L2+(FD-Fd1)×L3]-(FB-Fb1)×L1>0(向下为正方向),因此在A 点和D 点的转矩之和是向上的,所以原来只由A 点承担的附加转矩大部分被分配到了D 点,避免了A 点受载荷的反复作用而造成的应力集中现象。
又因为A 点与D 点的距离足够小,可以认为所受的附加转矩由A 点和D 点组成的区间共同承受,所以2 个滚轮共同作用产生的FA和FD抵消Fa1,并且能够产生一个相反方向的力矩,抵消B 处产生的转矩。
通过上述受力分析,证明改造方案可以避免轨道的变形。改造实施后,生产实践证明轨道长时间工作后未发生变形,达到了预期的改造效果。
改进后的定尺机结构如图5 所示,包括悬挂式定尺机、轨道、有定位的滚轮、无定位的滚轮、挡板和梁。改进后的悬挂式定尺机增加了1 组无定位滚轮,并保持与有定位滚轮中心距足够短。增加的无定位滚轮改变了现有技术方案的受力特点,在无定位滚轮与轨道接触处增加了一个向上的转矩,分散了原设计在有定位滚轮处产生的应力集中。

图5 改进后的定尺机结构
在挡板受撞击力的瞬间,有定位滚与轨道接触线处产生的瞬时力由无定位滚轮与轨道接触处和有定位滚轮与轨道接触线处构成的区间共同承受,避免了反复操作挡板齐头时产生的瞬时力反复冲击作用于此段轨道,而造成有定位滚轮与轨道接触处轨道的局部疲劳变形,也避免了更换梁而造成的工程量和备件费用。
4 总结
根据悬挂式定尺机的受力特点,增加1 组无定位滚轮,抵消挡板受撞击时产生的瞬时力冲击,防止轨道变形。通过技术改造,悬挂式定尺机的检修维护工作量大幅降低,并节约了备件费用。
猜你喜欢
中学生数理化·自主招生(2023年3期)2023-03-17
电站辅机(2021年4期)2021-03-29
冰雪运动(2019年2期)2019-09-02
四川冶金(2018年1期)2018-09-25
阅读(中年级)(2016年11期)2017-01-23
通信电源技术(2016年1期)2016-04-16
现代制造技术与装备(2015年4期)2015-12-23
电机与控制应用(2015年3期)2015-03-01
发明与创新(2015年26期)2015-02-27
时代农机(2013年3期)2013-09-21
