配网带电作业机器人应用场景分析
2023-10-25 09:26:50刘明悦
中国科技纵横 2023年16期
刘明悦
(安徽合肥市第四中学,安徽合肥 230061)
0 引言
随着社会经济的发展和人民生活水平的提高,电力需求量不断增加。同时,人们对供电可靠性的要求也越来越高。在这种背景下,不停电作业技术成为电力系统中不可或缺的一部分。然而,传统的不停电作业方式存在很多问题,如操作人员的安全风险高、工作效率低等。因此,如何提高不停电作业的效率和安全性成为一个亟待解决的问题。近年来,随着机器人技术的不断发展,配网作业机器人逐渐成为一种新的解决方案。本文将对国内外配网作业机器人的应用情况进行剖析,分析其优缺点,并预测未来发展趋势。
1 国外配网作业机器人应用场景
国外早期开展的配网带电作业机器人的研究主要集中在机器人本体的设计和研制方面。普遍使用操作手柄远程遥控操作,控制机器人进行空中作业。
1.1 美国配网带电作业机器人应用情况
图1 展示的是美国Kraft 公司与美国电力研究所(EPRI)、西南研究所、ABChance 公司以及费城电气公司合作的输电网带电作业机器人“TOMCAT”。这是一种能够在电压超过一百万伏的输电线路上工作的带电作业机器人。主体用的是Kraft 公司生产的6 自由度液压单机械臂,侧边有多视角视像头,用于辅助操作人员远程观察。但是单个机械臂很大程度上制约了该机器人的作业功能种类。美国太平洋天然气和电力公司(PG&E)的空中集成机器人(AIR)平台同样配备了两个用于配电线工作的KraftGrips 力反馈机械臂,操作员被隔离并免受高压和天气的影响。

图1 美国TOMCAT 带电作业机器人
1.2 加拿大配网带电作业机器人应用情况
加拿大魁北克水电公司于20 世纪90 年代研发了双液压臂带电作业遥控机器人系统,用于25kV 电压的架空配电线路的带电维护[1],如图2 所示。开发思路与上述机器人基本相同,同时做了系统的升级。开发团队在雨中进行了50kV 线路下进行作业测试,工作效率约为人工的70%。液压臂分别是PUMA760 和SarcosGRLA,平台上方还有一个辅助臂协助作业[2]。操作人员仍需将机器人上升至高空,在驾驶舱内控制液压双臂机器人进行近距离操作。魁北克水电公司还开发了一个用于配电网场景安装木制横担的爬杆型机器人原型[3]。其主要任务是将横担与电杆和配电线路对齐,在横担和电杆上钻孔,装入螺栓并拧紧螺母以固定横担。该机器人属于专项作业型机器人,作业功能单一。

图2 加拿大双液压臂带电作业机器人
1.3 日本配网带电作业机器人应用情况
日本株式会社爱知公司就开发出了用于6.6kV 的配网带电作业的远程遥操作力反馈机器人系统,如图3 所示。该系统包含了一套额外的完整工具,在通电的配电线路上执行安装、维护和维修任务,而线路工则坐在绝缘驾驶室中进行操控。日本九州电力公司开发了PhaseI(1987)和PhaseII(1992)系列电机驱动的配网带电作业机器人。PhaseI 中操作者位于斗臂车上进行近距离遥控操作,机械臂为负载20kg 的7 自由度机械臂[4]。PhaseII 改为人在地面遥控操作,地面控制端有多视角监控系统、力反馈操纵杆,使用光纤作为控制信号的传输载体[5]。主操作端有人机界面,可以通过触摸面板显示屏和语音识别系统控制摄像头的移动,属于半自主作业机器人。Tsunemi 等[6]对比了遥控操作式的PhaseI 和和半自动化的PhaseII,通过提高机器人的自动化程度,可以显著提高机器人的作业效率,缩短作业时间。Murakami 等[7-8]提出了PhaseIII 的开发理念,通过视觉和激光传感器自动获取视觉信息,结合三维识别定位、机械臂运动规划和无传感器柔性控制技术实现全自主作业。但尚未在新闻报道中看到Phase Ⅲ带电作业机器人在现场的作业资料。

图3 日本Aichi机器人系统
1.4 西班牙配网带电作业机器人应用情况
如图4 所示,西班牙马德里理工大学研发的主从液压双臂机器人ROBTET,旨在对高达69kV 的西班牙供电网络执行维护任务[9-11],系统以半自动控制模式工作。操作端有主遥操作手柄、电脑显示、立体显示设备、麦克风和辅助设备。从端有2 个Kraft 液压臂、2 个立体摄像头(液压臂末端)、1 个全景摄像头、1 个辅助吊臂和工具。工具和双臂之间的电源相互独立、电气相互隔离。

图4 西班牙ROBTET液压驱动机器人
2 国内配网作业机器人应用场景
国内对配网带电作业机器人的研究起步较晚,山东鲁能开发的DWR-I 机器人是用于10kV 电力系统线路带电作业检修的机器人系统[12-13],如图5 所示。液压臂末端安装了六维力传感器,使用主从相同拓扑结构的主手遥控操作进行作业[14]。在最初的样机中,操作人员同样是随机器人一起上升至空中,近距离遥操作控制。对比国外同类型带电作业机器人,驾驶舱缺少防护,作业易受天气影响。在最新的一代机器人中,将机器人和操作人员彻底分离,如图5-c 所示。人在地面控制空中的机器人,通过远程多视角摄像头的视觉反馈进行观察。

图5-a 鲁能 DWR-I图5-b 操作员近距离图5-c 操作员远程控带电作业机器人控制机器人制机器人
如图6-a 所示,湖南省电力公司开发的配网机器人以双电机臂为原型,建立了工作机器人与作业对象之间的闭链关节动力学模型,得到闭链混合动力学方程,并设计了机器人力-位置控制系统[15]。机器人的安装方式是仿人双臂式,在机器人侧边进行对称安装。能够遥控操作完成剥线、接线、剪线作业。值得一提的是,该机器人使用的升降系统不是传统的绝缘斗臂车系统,而是一种履带式移动平台。工作时将4 个支腿张开,保持稳定,利用360°旋转平台及绝缘提升臂将机器人提升到合适位置。各部件之间可基于多驱动控制技术实现一键式寻找自平衡。如图6-b 所示,上海交通大学研发了一种应用于10kV 架空线路自动带电作业机器人[16]。机器人平台上安装了3 只UR 机械臂,其中2 只作为机器人执行臂,双臂协作完成带电作业,另1 只被安装在机器人后方作为视觉臂。视觉臂上安装了结构光相机,作为手上的视觉感知系统,实现了室外条件下电缆的识别和定位,但是达不到精细作业的要求。另外,构建了虚拟仿真环境,能够反映机器人的运行状态。机器人可以自动完成大部分操作,但同时仍然需要一定的校正和确认操作。

图6-a 湖南电力公司机器人原型图6-b上海交通大学机器人原型人原型
国内集成化程度做得比较好的配网带电作业机器人是亿嘉和公司开发的Z100“蛟龙”室外带电作业机器人,如图7-a。机器人整体和作业工具均加了绝缘防护,确保带电作业环境下机器人作业的安全可靠性。可自动更换末端作业工具,实现不同类型的连续带电作业。使用激光雷达对环境进行扫描,并分割出作业目标[17-18],能够自主完成带电接火作业,但相对耗时较长(约40 多分钟)。由于是公司产品,没有过多的技术文档可以参考,尚不知在环境相对复杂的条件下效果如何。

图7-a 亿嘉和公司图7-b 瑞嘉公司图7-c 瑞嘉公司Z100“蛟龙”机器人单臂机器人RJ1300双臂机器人
国网瑞嘉公司在同时期也推出了配网带电作业机器人产品,分别是智能高空作业平台、单臂人机协同配网带电作业机器人以及RJ1300 双臂带电作业机器人,如图7-b 所示。如图7-c 所示,智能高空作业平台主要是利用3D 激光建模技术,将带电作业场景三维建模,并进行移斗路径自主规划,将机器人送至最佳作业位置。单臂机器人用于辅助高空作业的一线人员进行带电作业,主要完成作业中与电力线直接接触的动作,人机协同完成作业。RJ1300 双臂带电作业机器人具有视觉和力觉传感模块,利用多传感数据融合,基于视力觉伺服对机械臂进行运动控制。作业人员在地面上用平板电脑发出作业指令,远程控制双臂机器人完成作业。
3 配网带电作业机器人发展现状及发展趋势
3.1 配网带电作业机器人发展阶段
根据有关文献研究发现,可以将机器人的发展大致概括为3 个阶段。第一阶段是近距离遥操作类型的,其中包括DWR-I、魁北克水电公司开发的机器人以及Aichi 在内的配网带电作业机器人。第二阶段是人在地面远距离遥控操作类型,操作人员通过力反馈和视觉反馈获取机器人现场的操作状况,机器人具有一定的局部自主能力,主要代表有ROBTET、TOMCAT、PhaseII 等。第三阶段是整体以机器人自主操作为主、人为干预为辅进行带电作业任务的类型。操作人员在地面操作时能全面地了解机器人在空中的工作状况。日本九州电力开发的Phase Ⅲ、亿嘉和公司的Z100“蛟龙”以及国网智能公司的RJ1300 均属于第三阶段配网带电作业机器人。表1 列举了配网带电作业机器人在3个发展阶段中的典型代表,并比较了机器人的各项参数。
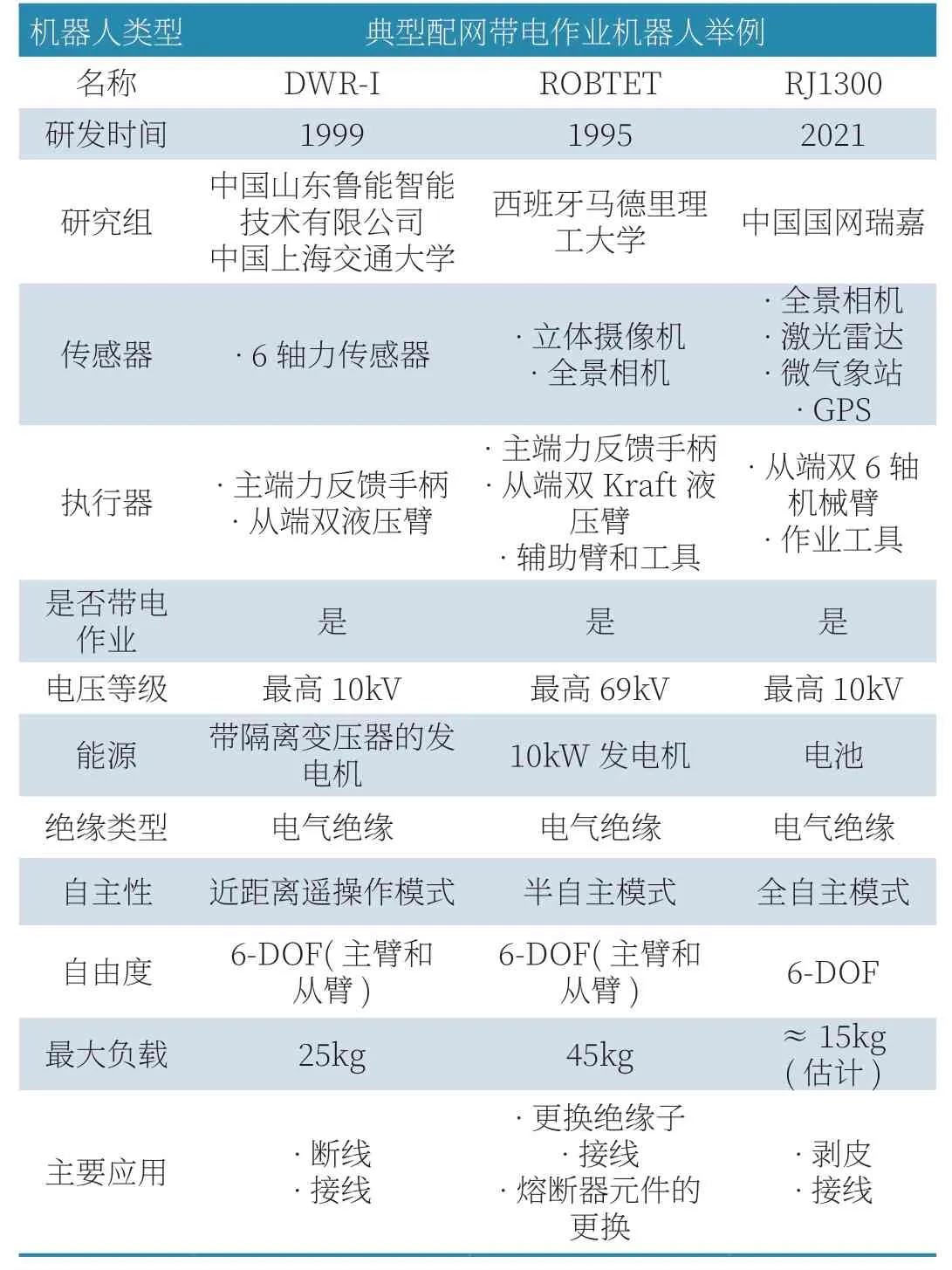
表1 文献公布的典型配网带电作业机器人系统比较
3.2 配网带电作业机器人的不足之处
目前配网带电作业机器人仍然存在灵活度差、作业效率低、操作安全性差等问题,无法适应复杂多样的带电作业需求。因此,具有作业目标精准识别锁定、高效作业控制、多样化作业功能的配网带电作业机器人成为发展趋势。关于配网带电作业机器人的关键技术研究仍在开发。
3.3 配网带电作业机器人发展趋势
随着人工智能等新兴数字技术的迭代更新和科技研发产业链快速升级,国内配网作业机器人的应朝以下方向发展。
3.3.1 提高安全性和可靠性
随着人们对电力系统安全要求的不断提高,配网作业机器人必须具备更高的安全性和可靠性。未来的机器人需要具备更好的感知能力、更精确的控制能力和更强的适应能力。
3.3.2 实现智能化和自主化
未来的配网作业机器人需要具备更高的智能化和自主化水平。这意味着机器人需要能够根据环境变化做出相应的反应,并且能够自主地完成各种任务。此外,机器人还需要具备更强的学习能力和创新能力。
3.3.3 推动标准化和产业化进程
推动国产配网作业机器人标准化和产业化进程需要政府、企业和科研机构共同努力。政府出台相关政策,鼓励骨干企业联合开展机器人研发工作,推动软硬件系统标准化和模块化,提高新产品研发效率。同时,支持企业加强技术中心建设,开展关键技术和应用技术开发。
新一代人工智能配网带电作业机器人运用三维环境重建、视觉识别、运动控制等核心技术,攻克了机器人精准定位、自主规划、智能控制、安全防护4 项技术难题,也解决了人工带电作业的痛点和难点问题,实现了国产配网作业机器人的产业化和规模化。
4 结语
智能机器人配网带电作业,给电网操纵人员带来极大的安全保护,其技术研发与应用场景具有巨大的发展空间,尽管目前有着种种技术不足与应用缺陷,但随着人工智能的不断开拓,必将带来电网行业的巨大变革与发展。
猜你喜欢
少年博览·初中版(2020年6期)2020-06-12 11:42:23
经济技术协作信息(2018年33期)2018-12-06 08:56:08
电子测试(2018年18期)2018-11-14 02:31:08
电子测试(2017年23期)2017-04-04 05:07:50
故事大王(2016年7期)2016-09-22 17:30:08
现代工业经济和信息化(2016年4期)2016-05-17 05:35:38
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19