
基于天线幅相误差校正的干扰感知测试方法*
2023-10-25 06:51薛仁魁李雨濛
火力与指挥控制 2023年8期
王 田,薛仁魁,陈 强,李雨濛,吴 熙
(北京东方计量测试研究所,北京 100086)
0 引言
天线作为感应接收导航系统卫星发射导航信号电磁波的装置,是每个卫星导航接收设备必需的组成单元,天线的性能是决定卫星导航终端性能指标的关键。特别是针对复杂电磁环境下导航设备抗干扰性能,多阵元抗干扰天线性能直接决定设备性能,目前已采用北斗导航装备抗干扰天线数字波束形成技术,精准判别干扰信号来向及强度已成为基本要求,这将有助于提升装备抗干扰性能。
本文基于常见的七阵元抗干扰设备,对天线幅相误差对二维MUSIC 算法的影响分析与校正进行了研究,开展了校正方法分析,并结合仿真分析及暗室测试,详细描述了基于满天星穹顶暗室的测试环境、测试场景设计、测试流程实现、测试结果统计。通过算法设计、仿真分析及测试验证,证明基于天线幅相误差校正的干扰感知方案成熟可靠,有助于干扰性能的准确评估。
1 二维DOA 估计
1.1 MUSIC 算法模型
上世纪80 年代以来,人们对基于特征分解的超分辨率空间谱估计算法进行了广泛深入的研究,并提出了一系列高效的处理方法,其中最经典的是多信号分类(MUSIC)算法,其理论已经比较成熟[1]。
考虑一个由M 个阵元组成的任意阵列,各阵元方向特性相同,O 点为阵列中心,如图1 所示。假设有P 个卫星信号和Q 个干扰信号入射到阵列上,且满足远场入射条件,阵列接收信号可以表示为:
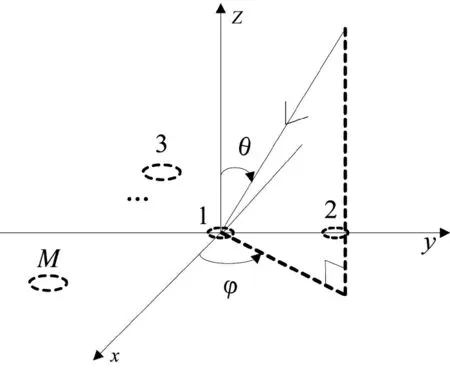
图1 4 阵元阵列示意图Fig.1 4 element array diagram
首先,对阵列接收的信号进行采样,假设阵元数为M,快拍数为N,则一个数据块的接收信号可以表示为
然后对接收信号进行希尔伯特变换得到XH,再求对应的协方差矩阵:
经过特征分解得到了噪声子空间,然后就可以计算相应的空间谱函数。MUSIC 算法的谱函数为
其中,α(θ,φ)为信号的导向矢量。MUSIC 算法的原理主要是利用信号子空间和噪声子空间的正交特性。本文通过遍历扫描导向矢量对干扰信号来向进行搜索。当(θ,φ)为某一个干扰信号来向时,其对应的导向矢量向噪声子空间投影的模值为零,P趋于无穷大,但由于实际中采用的是样本协方差矩阵,所以与并不会完全正交,此时谱函数会出现一个峰值,由此可以得出干扰信号的来向估计值。
1.2 天线幅相误差影响分析
当天线及射频通道存在幅相误差时,由于天线不一致性,不同干扰来向的幅相误差并不相同,因此,需要加以区分。谱峰公式变为:

表1 干扰感知测试结果Table1 Interference perception test results
设定阵元坐标为7 阵元,坐标如图2 所示。
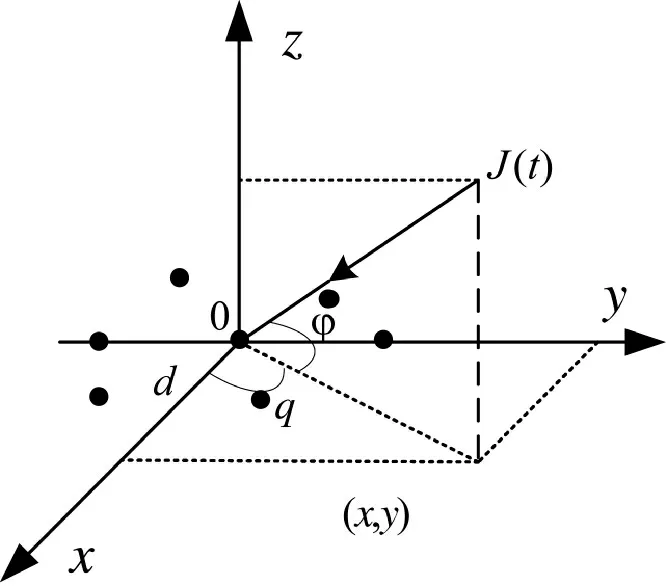
图2 七阵元天线阵示意图Fig.2 Schematic diagram of seven-element antenna array
当不存在幅度误差时,在(5,70)(即仰角5°,方位角70°,下同)方向施加单干扰,得到的谱峰图如图3 所示,在干扰来向上有显著峰值,MUSIC 算法估计值与仿真设定值一致。

图3 无幅度误差谱峰图(单干(5°,70°))Fig.3 Peak plot without amplitude error spectrum(single-interference(5°,70°))
当天线存在幅度误差时,设定误差值为[0,1,-1,1,-1,1,-1]dB,波动约2 dB,与一般的硬件设计指标波动程度相当,据此评估幅度误差可能带来的影响。
仿真结果如图4 所示,谱峰位置仍为(5,70),但峰值显著降低,说明±1 dB 的幅度误差,对MUSIC 谱峰估计的精度影响较小,但对峰值影响较大,当来向信号的信噪比不够大时,可能因为峰值过小,造成错误估计。
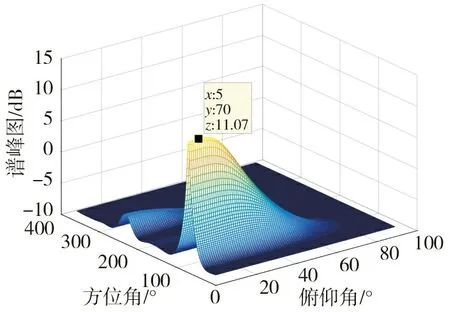
图4 有幅度误差谱峰图(单干(5°,70°))Fig.4 Spectral peak plot with amplitude error(single-interference(6°,70°))
当存在相位误差时,设定相位误差为[0,-5,-5,0,-5,5,5]度,考虑相位误差波动±5°带来的影响。
仿真结果如下页图5 所示,峰值位置会受到相位误差影响有点偏移,同时谱峰峰值也显著下降。
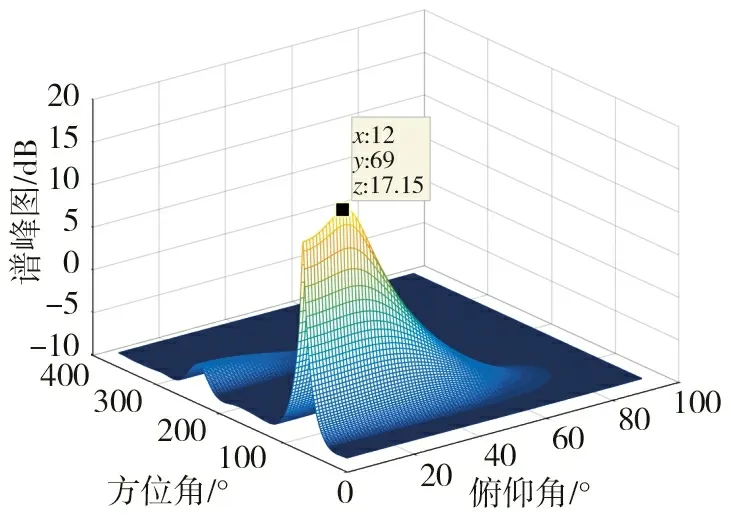
图5 有相位误差谱峰图(单干(5°,70°))Fig.5 Spectral peak with phase error(single-interference(5°,70°))
2 天线幅相误差校正方法
从以上分析可知,幅相误差会显著降低MUSIC算法估计谱峰的峰值大小,同时可能引入估计角度偏差。由于天线阵列互耦等因素的影响,天线阵子对不同方向来的信号,引入的幅相误差并不相同,因此,需要对天线进行全方位校正。
全方位校正方法为:
在暗室中,将被测天线安装于二维转台上,在不同俯仰角和方位角条件下,分别进行校正。
考虑工程实际,俯仰角和方位角均需按合理步进进行,本文采用的天线阵列,按方位角按10°步进,俯仰角按15°步进测试,能够达到预期的校正效果。
仰角30°时,不同方位,6 个通道相对于主通道需要修正的相移如图6 所示。

图6 修正相移图(仰角30°,6 通道)Fig.6 Correction of phase shift diagram(30°elevation,6 channels)
在(30,100)方向加干扰,仅法向校正时,测向结果如图7 所示,方位角存在十几度误差,谱峰不是十分显著。

图7 法向校正示意图Fig.7 Schematic diagram of normal correction
全方位校正后,在当前校正的点,得到了显著的峰值,如图8 所示。

图8 全方位校正示意图Fig.8 Schematic diagram of omnidirectional correction

图9 测试示意图Fig.9 Test diagram

图10 三干扰发射示意图Fig.10 Schematic diagram of three interferences

图11 六干扰发射示意图Fig.11 Schematic diagram of six interferences
通过全方位校正方式,对不在校正点上的方位进行大量测试,测试结果满足方位角精度±5°以内的精度,而仅仅校正法向的方式,则个别点精度超过20°。
3 暗室干扰感知性能测试
3.1 测试环境
测试环境为穹顶式满天星暗室,暗室内核心测试设备包括北斗三号单星输出导航信号模拟器、干扰信号源、三轴高精度转台及自动化测试评估系统。其中,针对抗干扰测试特别设计的满天星暗室,目的是为了真实模拟北斗卫星导航系统实际卫星分布,因此,暗室在顶部和侧面安装了75 个单星导航天线,用于发射卫星导航信号;同时在暗室内架设了7 个干扰天线,连接于干扰信号源,用于模拟导航对抗中的各种压制干扰信号,在自动化测试评估系统控制下,可开展目前北斗导航装备主流工作模式下的抗压制干扰性能测试评估。
3.2 测试场景
3.2.1 仿真测试场景
仿真场景载体为高动态,载体最大速度≥500 m/s、最大加速度0~18 g、最大加加速度0~4 g/s″,仿真位置选为110°E、25°N、800 m,仿真时间选为2022年10 月1 日,导航信号满天星分路输出,满足PDOP≤4。
3.2.2 三干扰场景
1)干扰类型:3 个宽带干扰;2)宽带干扰:中心频率1 268.52 MHz,带宽20.46 MHz;3)调制方式:QPSK 调制。
干扰信号、卫星信号和接收天线三者之间的夹角大于30°(以接收天线为顶点),控制卫星信号发射至接收天线口面信号强度为-130 dBm,干扰信号至接收天线信号强度为-40 dBm,相当于干信比为90 dB,干扰信号功率可以按1 dB 步进,实现干信比从90 dB~98 dB 变化[5]。
3.2.3 六干扰场景
1)干扰类型:6 个宽带干扰;2)宽带干扰:中心频率1 268.52 MHz,带宽20.46 MHz;3)调制方式:QPSK 调制。
控制卫星信号发射至接收天线口面信号强度为-130 dBm,干扰信号至接收天线信号强度为-50 dBm,相当于干信比为80 dB,干扰信号功率可以按1 dB 步进,实现干信比从80 dB~88 dB 变化[6]。
3.3 测试方法
1) 根据仿真测试场景载体轨迹选择相应单星天线播发卫星导航信号,根据干扰信号来向发射压制干扰信号,将被测样品安装于三轴高精度转台。
2) 自动化测试评估系统播发北斗B3 频点信号,信号强度为-130 dBm。
3) 通过自动化测试评估系统对被测样机发送MSS 指令,使其工作于相应频点定位模式。
4) 自动化测试评估系统对被测样机发送TIM授时指令,授时精度偏差不超过1 ms,并向被测样机发送载体仿真概略位置和历书数据。
5) 自动化测试评估系统对被测样机发送RIS复位指令及RMO 数据频度上报指令,使其按照1 Hz频度上报干扰感知结果。
6) 测试过程中,评估系统控制三轴高精度转台按照循环往复运动模式匀速转动,转速2°/s。
7) 自动化测试评估系统按照起始干信比规定(三干扰90 dB、六干扰80 dB)控制干扰信号源发射压制干扰信号。
8) 为提高测试效率,设置提前中止门限,若被测样品在180 s 内无干扰感知结果上报,则终止测试。
9) 若被测样品识别到干扰信号并正常上报干扰感知结果,则测试300 s,并统计该干信比下的干扰来波方向感知指标。
3.4 评估方法
将被测设备上报的干扰感知与测试系统提供的已知干扰信息进行比较,计算干扰来向感知误差,包括干扰来向角度感知误差和干扰功率感知误差[7-8]。方位角误差分量、干扰功率误差计算方法:
对m 个测试精度误差按从小到大进行排序。室内多干扰测试时,取第[m×95%]个排序结果作为本次测试的干扰感知精度。m 为采集样本数,[m×95%]表示不超过[m×95%]的最大整数[9]。
3.5 测试结果
七阵元终端分别在3 个干扰信号和6 个干扰信号压制下进行测试,干扰感知测试结果如表1 所示。
4 结论
本文给出了幅相误差对二维MUSIC 测向算法误差影响分析,提出了全方位对天线幅相误差校正的方法,并通过对七阵元抗干扰终端在三干扰和六干扰下满天星暗室实际性能测试。结论如下:
1)该方法能够达到测向精度±5°以内,相比仅校正法向的方式,有明显性能改善。
2)干扰功率感知误差在5 dB 以内,能够满足目前装备对干扰功率感知误差要求。
随着北斗卫星导航系统应用推广与产业化迅猛推进,在复杂电磁对抗环境下导航定位的可靠性已得到各方高度关注,采用全方位天线幅相误差校准方法能够有助于感知精度提升,可应用于北斗抗干扰终端研制中。
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
军民两用技术与产品(2021年5期)2021-07-28
分析科学学报(2021年3期)2021-07-14
科学技术创新(2021年11期)2021-05-25
色谱(2021年6期)2021-05-06
科技资讯(2020年12期)2020-06-03
空天防御(2020年1期)2020-04-13
电子测试(2018年13期)2018-09-26
电子技术与软件工程(2018年4期)2018-03-23
数学小灵通·3-4年级(2017年2期)2017-05-30
