马铃薯中耕施肥机械研究现状与发展趋势
2023-10-24 10:36陈立畅李佩妮杨振杰张艳诚张佳进
江苏农业科学 2023年17期
陈立畅 李佩妮 杨振杰 张艳诚 张佳进

摘要:中耕施肥作为马铃薯种植的必要管理环节,对促进马铃薯植株生长发育、提高马铃薯产量和品质具有重大的现实意义。中耕施肥机械是实现马铃薯生产全程机械化的重要组成部分,目前马铃薯中耕施肥存在机械化率低,农机与农艺融合程度较低,劳动时间长、强度大,作业效率低等问题,丘陵山区马铃薯生产机械化存在明显的短板。本文介绍了马铃薯种植模式及中耕施肥农艺要求,重点阐述了国内外马铃薯中耕施肥机械的研究现状,代表机型的技术参数和结构特点,并结合我国农业机械化水平区域发展不平衡的特点,对未来马铃薯中耕施肥机械的研究与发展趋势作出展望,以期为我国马铃薯中耕施肥机械和马铃薯生产全程机械化发展提供参考与借鉴。
关键词:马铃薯;中耕施肥;机械装备;发展趋势
中图分类号:S224.21文献标志码:A 文章编号:1002-1302(2023)17-0001-08
马铃薯,别称洋芋、土豆等,是全球第四大粮食作物[1-4]。我国是马铃薯种植和生产大国,种植面积和总产量均位居世界第一。2020年,我国马铃薯种植面积约为465.6万hm2,总产量为1 798.3万t,种植面积和总产量约占全球的1/4[5-7]。但我国马铃薯单位面积产量水平还远低于世界平均水平[8-10],机械化程度低、区域发展不协调等都是制约我国马铃薯产业发展的关键问题。为了促进马铃薯产业的发展,2016年初农业农村部出台了《关于推进马铃薯产业开发的指导意见》[11],将马铃薯主粮化战略和马铃薯生产全程机械化提升到国家高度[12-13]。
中耕施肥作业是马铃薯生产的重要环节,对促进马铃薯植株生长发育和提高马铃薯产量具有很大的现实意义,中耕施肥机械也是实现马铃薯生产全程机械化的重要组成部分。近年来我国加大了中耕施肥机械方面的研究,涌现出了一大批优秀的科技成果,农业机械化水平逐步提升。但目前马铃薯中耕施肥机械化率低,农机与农艺融合程度较低,劳动时间长、强度大,作业效率低等问题依然存在,并且丘陵山区马铃薯生产机械化存在明显的短板。因此,本文重点阐述了我国和世界发达国家马铃薯中耕施肥机械的研究现状、代表机型的技术参数和结构特点,并结合我国农业机械化水平区域发展不平衡的特点,对我国马铃薯中耕施肥机械研制和发展趋势作出展望。
1 马铃薯种植模式及农艺要求
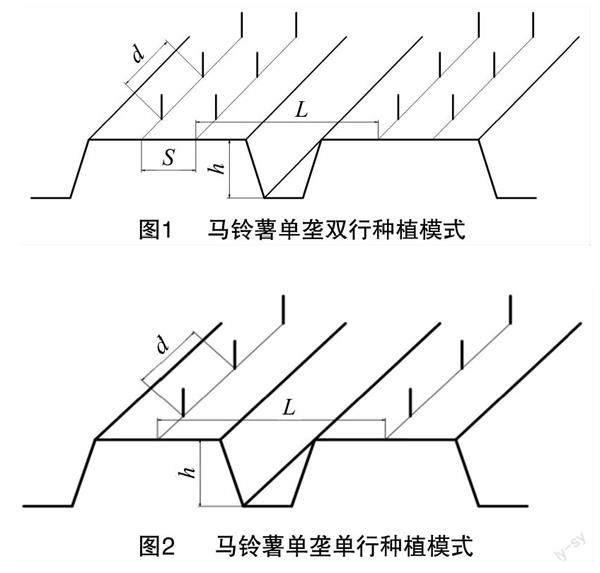
平作和垄作是马铃薯最常见的种植模式,其中垄作又分为单垄单行和单垄双行[14-15],单垄单行相对于单垄双行来说,是在保证垄高的前提下减少垄宽的栽植模式,其栽植密度小,单株结薯多、薯块大,更加便于机械化作业。根据中华人民共和国农业行业标准NY/T 3483—2019《马铃薯全程机械化生产技术规范》中的要求,马铃薯单垄双行种植模式:2行植株交错呈三角形分布,马铃薯种薯距垄边10~15 cm,垄上行距S为17~36 cm,垄高h为 15~30 cm,株距d为15~35 cm,垄间距L为100~130 cm(图1);马铃薯单垄单行种植模式:马铃薯种薯沿垄的中心线分布,种植株距d为16~30 cm,垄间距L为60~90 cm,垄高h为20~25 cm(图2)。
2 国内外马铃薯中耕施肥机研究现状
2.1 国外马铃薯中耕施肥机研究现状
西方发达国家早在20世纪初便开始研究和开发中耕施肥机械,有着深厚的技术积累,目前的研究向通用化、智能化、精准化等方面进一步发展[16-20]。
以美国和欧洲为代表的西方发达国家和地区,由于工业化完成较早,农业机械化发展进程较快,农业装备和机械化水平处于全球领先地位[21-22]。但国外马铃薯中耕施肥机械主要由企业研发,并注重专利权保护,因此可供参考的外文文献相对有限。
美国代表性机型为约翰迪尔施肥机(图3)、凯斯的IH4600中耕施肥机(图4)[23]以及阿里斯-查莫斯的6000、8000系列中耕机,主要以构建大型联合作业机械和复式联合作业机械为主,大幅提高农机作业效率,追求更高的经济收益[24]。约翰迪尔施肥机由液压系统驱动控制,机架具有仿形功能,采取挠性设计,配备深度测量和控制装置,能根据田间地表的情况实时调节机器工作状态[25]。凯斯的IH4600型中耕施肥机采用三点悬挂式与轮式拖拉机连接,由液压控制中耕机上端的折叠部分散开,从而进入工作状态,作业效率高,作业范围也更大。
德国代表性机型为Amazone公司ZA-M系列的新型施肥机(图5)。该系列施肥机均设计安装Safety-Set新型安全机构,极大提高施肥作业的安全性,另外还装用SBS型软弹道系统,保证施肥精确度,设置有称量系统,可以对作业宽度和流量进行调整,使施肥机作业达到最佳效率[26]。德国BASELIER公司的马铃薯中耕机(图6),设有液压松土机构,可根据现场实际情况调整犁铧的入土角度及深度,该机具作业稳定、适应性较强[27]。德国GRIMME公司的GH系列马铃薯中耕机(图7),适用于不同的土壤條件,能根据土壤条件,灵活方便地安装配置不同的松土弹齿和培土犁铧进行碎土、培土作业[28],可调节向下的压力和角度,以便筑起不同形状的垄脊。
英国代表性机型为STANDE公司Baselier GKB系列马铃薯中耕机(图8)[29]。该系列有3种型号,其适应行距分别为75、80、90 cm,可以通过拆卸形塑造板来改变作业行数和垄型,还能根据不同的土壤条件灵活方便地更换耕作部件。该机具成本较低,适应性强,作业效率高,1次作业行数为4行,且速度可达10 km/h[30]。
比利时代表性机型为DEWULF公司的SC300马铃薯中耕机(图9)[31]。该中耕机械适应范围极广,可与各种型号拖拉机配套使用,其转子直径为65 cm,动力传动系统额定功率为180 kW,作业效率高,在作业中能调节培土宽度和深度来保证垄型,适用于各种黏重土壤。该机具综合性能好,工作效率高,结构相对紧凑。
2.2 国内马铃薯中耕施肥机研究现状
国内马铃薯中耕施肥机械的研究相对于西方发达国家起步较晚,但近几十年来经过国内各大高校、企业和科研院所的不断探索和研发,相关技术装备得到了较为迅速的发展,出现了种类繁多的各类中耕施肥机械。从地域划分来看,主要为大中型拖拉机及其配套的各种中耕施肥机具和小型丘陵山地中耕施肥机2种,具体装备分别阐述如下。
2.2.1 大中型中耕施肥机械
北方平原由于地势平坦,种植面积广阔,中耕施肥机械主要以大中型为主。这类机械多采用大中型农业拖拉机牵引悬挂各种中耕施肥机具进行作业,按照工作部件的形式可分为驱动式中耕机械和被动式中耕机械。这类机具总体结构尺寸较大,作业幅宽大,一般作业行数在4行及以上,配套功率在40 kW以上,机具作业效率高,操作方便,购置成本高,适合北方平原地域或农场规模化、集约化使用。
2.2.1.1 被动式中耕施肥机械
田斌等设计研制的2LZF-2型垄作马铃薯中耕施肥机[32](图10),仿形地轮行走系统能适应马铃薯行距的变化,也能适应不同垄台高度和耕深的变化,对机架和深松铲部件进行了有限元仿真分析,进一步验证了机械结构的强度和刚度,整机外形尺寸为2 230 mm×2 250 mm×1 200 mm(长×宽×高),作业行数为3行,配套最低动力为40 kW,适应垄距为75~90 cm,采用三点悬挂方式与拖拉机连接。该机具能一次性和单独完成深松、锄草、追肥、培土等不同作业。
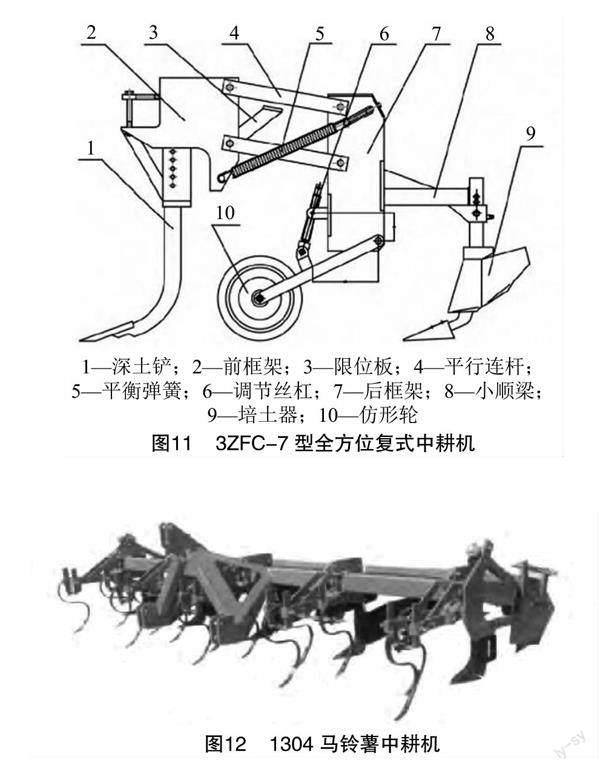
车刚等研制的3ZFC-7型复式中耕机(图11)[33],整机外形尺寸为5 200 mm×2 160 mm×1 810 mm(长×宽×高),质量为1 863 kg,配套最低动力为59.2 kW,作业行数为7行,适应垄距为60~70 cm,施肥量为 70~100 kg/hm2,与拖拉机悬挂连接,利用平行四杆仿形原理巧妙设计了液控可变地隙机架,能自动调节所需要的深松和施肥深度,此外还设计应用了智能计量系统,在作业过程中节省了5%的肥料。该机具结构简单紧凑,通用性强,作业效果好,能一次性完成深松、施肥和修复垄台等作业,适合农场规模化作业。
李洋等研制的1304马铃薯中耕机(图12)[34],是目前国内综合性能比较优越的中耕机具, 其整机外形尺寸为1 900 mm×3 800 mm×1 100 mm(长×宽×高),整机质量930 kg,作业行数为4行,适应行距为90 cm,配套最低动力为74 kW,与拖拉机挂接。该机具结构简单,设计新颖,“S”形弹齿和培土犁铧更换维修方便,松土深度和垄薯高度可调整,松土、培土的一致性好,适用性强,作业效率高。
3ZM-4型马铃薯中耕机(图13)[35],整机外形尺寸为2 500 mm×3 950 mm×1 510 mm(长×宽×高),整机质量为1 060 kg,作业行数为4行,配套最低动力为66 kW,与拖拉机悬挂连接。该机具结构新颖,工作可靠性高,作业性能强,能一次性实现松土、起垄、整形、施肥等功能,起垄的垄型整齐规律,尤其适合于在松土地表上作业。
曹海峰研制的3ZQ-10型中耕追肥起垄机(图14)[36],整机外形尺寸为2 570 mm×6 580 mm×3 000 mm(长×宽×高),作业行数为9行,配套最低动力为90 kW,起垄高度为14~16 cm,以拖拉机相连接。该机具利用地轮,通过传动机构来带动排肥器工作,仿形机构的精妙设计保持了施肥和深松的一致性,可一次完成深松、施肥、碎土、起垄、镇压多项作业,并已验证机具符合中耕农艺要求。该机具通用性较广、适用性较强。
赵旭志研制的3Z-1.6型垄作马铃薯中耕机(图15)[37],整机外形尺寸为1 830 mm×1 790 mm×1 200 mm(长×宽×高),作业行数为2行,适应行距为80 cm,配套最低动力为40.4 kW,与拖拉机悬挂挂接,对仿形机构进行巧妙合理的設计,其仿形机构可使整形镇压部件随地表变化而始终保持深度的一致性,能自动适应起伏不定的地表变化。该机具结构简单可靠、操纵方便、作业性能稳定、适应性强。
吕金庆等研制的1ZL5型马铃薯中耕机(图16)[38],整机外形尺寸为3 600 mm×1 400 mm×1 630 mm(长×宽×高),整机质量为1 150 kg,作业行数为5行,适应行距为75~90 cm,配套最低动力为50 kW,采用三点悬挂方式与拖拉机连接,该机具通过橡胶地轮带动排肥装置工作,可一次性实现除草、松土、施肥、筑垄等多项作业。对覆土铧进行了设计和受力分析,确定了其机械结构参数,并进行了该中耕机的田间试验,验证了机具的作业性能。该机具结构简单,作业效率高,适应性较强且施肥效果好, 并能通过V型卡子调节两犁铧之间的距离去适应不同行距的作业要求。
程鹏飞等改进设计了3ZMP-360型马铃薯中耕起垄施肥机(图17)[39],在原有基础上增加了棘轮驱动的工作方式,很好地解决了轮子在湿、凹地面因抓地力不足发生空转的现象,增强了对环境适应能力;另外增加了肥料调节装置,解决了肥箱体积肥、堵塞的现象,改善了施肥效果,实现了变量施肥。
衣淑娟等研制了圆盘式马铃薯中耕机(图18)[40],整机外形尺寸为2 100 mm×3 400 mm×1 200 mm(长×宽×高),整机质量为422 kg,作业行数为2~4行,适应垄距为80~90 cm,配套最低动力为44.1 kW,采用三点悬挂方式与拖拉机连接。设计采用了圆盘式培土装置,对培土圆盘进行了运动分析和培土作业过程分析,很好地解决了中耕前期作业易伤苗的问题,并且能够通过调节圆盘的角度去调整培土量。
4.2.1.2 驱动式中耕施肥机械
吕金庆等对马铃薯中耕施肥机的关键部件进行了设计(图19)[41],碎土刀设计采用了凿形直刀,方式为两侧刀盘对称布置,并对碎土刀进行了切削应力分析,对旋转部件进行了运动分析,使中耕施肥机得到了更好的碎土率。吕金庆等对碎土刀、深松铲和培土器等关键部件进行了设计分析,确定了整机性能及结构参数,并通过田间试验验证了机具各项指标均满足中耕农艺要求[42]。
王莉等研制的驱动式马铃薯中耕机(图20),其整机外形尺寸为2 500 mm×2 300 mm×1 800 mm(长×宽×高),整机质量为800 kg,作业行数为4行,适应垄距为80~90 cm,配套最低动力为65 kW,采用三点悬挂方式与轮式拖拉机连接[43]。对重要部件培土器进行了受力分析并调整其结构参数,使中耕机各项性能指标均有所提高,机具尤其适合黏重土壤的东北地区。
彭曼曼等设计的驱动式马铃薯中耕机(图21)[44],整机外形尺寸为1 650 mm×2 550 mm×1 650 mm(长×宽×高),整体质量1 300 kg,作业行数为4行,适应垄距为70~90 cm,配套最低动力为50 kW,采用三点悬挂方式与轮式拖拉机连接,设计采用了有角度的凿形直刀,两侧刀盘作对称布置,并对其旋转单体进行了运动轨迹分析和运动仿真分析,确定了旋转体的合理性和可靠性。该机具可以一次性完成垄间松土、碎土、除草、培土等作业,适合我国北方等黏重土壤地区的中耕作业。
2.2.2 小型中耕施肥机械
南方地区主要是丘陵山地,由于地块小、地势陡峭等各种自然因素的限制,采用的是小型中耕施肥机械。这类机械多采用小型汽油机或者柴油机为作为机具的动力来源,大多需要作业人员推动行走,一次作业宽幅较小,作业行数一般为1行;作业中利用地轮,通过传动机构带动排肥器进行作业,能够实现开沟、施肥、覆土等作业,相关性能指标满足中耕农艺要求。相对于大中型机械而言,小型中耕施肥机械效率较低,但其灵活、小巧且操作方便,适用云南、贵州等丘陵地区。云南农业大学机电工程学院的孙鹏等研制的丘陵山地马铃薯中耕施肥机[45-47](圖22),机具结构简单紧凑,性能优良,能一次性完成松土、施肥、覆土等作业,相关指标满足当地中耕农艺要求;但机具施肥的一致性和均匀性较差,肥料利用率较低。沈鹏等对山地马铃薯中耕施肥机的排肥器进行了仿真优化,利用EDEM仿真软件,对排肥器在不同坡度下4种工作状态的排肥效果进行了模拟,并对机械结构进行优化,从而保证了排肥器在最佳状态下进行施肥作业[48]。沈东华等基于自激振动减阻原理对施肥机的培土器进行了分析研究,主要对培土曲面进行了设计,确定了培土器结构参数,并通过有限元仿真和土槽试验分别验证了培土器的铲柄强度和培土器的减阻效果,结果表明培土器的铲柄强度满足要求,培土器作业时的减阻效果好[49]。孔皓等研制了一款马铃薯中耕追肥机(图23),将驱动行走轮设计成履带式结构,防止机具在作业过程中因路面湿滑和凹陷产生打滑和滑移现象,提高了机具适应不同作业环境的能力,因此机具施肥的一致性和均匀性较好[50]。肥料箱两侧出口处设置有排肥软管,降低了肥料出口与施肥位置之间的高度,一定程度上保证了肥料的施放位置。
3 发展分析与展望
我国马铃薯种植面积和产量均位居世界第一,种植区域分布广泛,种植模式及农艺要求多样,地域显著性差异较大。国外先进的大型中耕施肥机械不适合我国马铃薯种植特点,国内对相关的技术装备研究起步较晚,我国马铃薯生产机械化水平较低。但近几年来,在国家政策不断支持和扶持的背景下,经各大高校、企业、科研院所的不懈钻研,我国中耕施肥机械得到了快速发展,逐步配套适合我国的马铃薯种植特点和区域性的中耕机械,逐步向着马铃薯全程机械化的进程迈进。针对马铃薯中耕施肥技术及装备,将在以下几方面取得突破性进展。
3.1 大型集成化和高效化
为了提高机械作业的生产效率,中耕施肥机械的研发正在向增加作业幅宽、提升机械功率和作业速度且一次性能实现行间中耕、喷雾、喷洒除草剂等功能的大型联合作业机械方向发展。我国马铃薯种植正在向产业化、规模化、集约化方向发展,将更有利于实现农作物全程机械化管理,从而进一步提升我国农业机械化水平。
3.2 精准化和精量化
在传统农业中,施肥技术比较粗犷,无法做到因地制宜,易引起肥料不合理施用,造成浪费、作物长势不一致等情况,从而导致作物产量下降、环境污染和肥料利用率较低等问题。目前,随着3S技术(遥感技术、地理信息系统、全球定位系统)在机械化施肥技术领域中的应用,现代农业正在向精准农业发展。精准农业施肥技术正在不断提升肥料施放位置和施放量的准确性,在作业前检测土壤肥力,按作物生长对不同养分的需求规律进行按需定量施肥,并根据作物长势的不同情况,调节肥料量的供给,提高肥料利用率。
3.3 自动化和智能化
随着自动化技术及人工智能产业的快速发展,智能控制、图像识别处理、人工智能等技术被应用于施肥机械中,为相关机具实现行间自动调行、自动调节作业参数、自动避让、自动控制施肥等功能打下了基础。因此,中耕施肥机具自动化、智能化的程度不断提高,有效降低了劳动强度,提高了生产效率,实现低损伤、高效和安全可靠的机械化作业,向着智慧农机进行全面突破。自动化和智能化将是马铃薯全程机械装备发展的必然趋势。
3.4 地域化
我国马铃薯种植区域分布广泛,北方多为平原,南方多为丘陵山地,地域条件差异显著,中耕施肥机械具有区域发展不平衡的特点。由于马铃薯种植模式及农艺要求多样,种植区域广泛且复杂,中耕施肥机械难以实现通用化和标准化。我国马铃薯中耕机械未来主要以高效、低损伤、智能化的大型中耕施肥机具为核心,为了适应地域差异及提高丘陵地区机械化水平的需求,应加大投入研究力量及科研经费,进一步加强丘陵山地马铃薯中耕施肥技术及装备的研究,开展研发及推广应用具有高原特色的小型马铃薯中耕施肥机械。
3.5 无人化
随着新一代信息技术(物联网、大数据、云计算、5G、人工智能等技术)的迅猛发展,以美国、日本为代表的发达国家纷纷开始构建无人农场。但目前为止,无人农场仍处在探索阶段。作为未来农业的一种全新模式,无人农场将成为未来全球农业领域不同国家竞争的主赛道。无人农机装备是未来能否实现无人农场的关键一步,无人农机化装备的研发与应用是未来马铃薯产业发展的重要方向。
參考文献:
[1]Kang W Q,Fan M S,Ma Z,et al. Luxury absorption of potassium by potato plants[J]. American Journal of Potato Research,2014,91(5):573-578.
[2]罗其友,高明杰,张 烁,等. 中国马铃薯产业国际比较分析[J]. 中国农业资源与区划,2021,42(7):1-8.
[3]高迎旺.马铃薯隐形损伤的生物散斑活性特征及检测研究[D]. 杭州:浙江大学,2018.
[4]王希英. 双列交错勺带式马铃薯精量排种器的设计与试验研究[D]. 哈尔滨:东北农业大学,2016.
[5]张玉胜. 中国马铃薯产品国际竞争力及出口潜力研究[D]. 北京:中国农业科学院,2020.
[6]国家统计局农村社会经济调查司. 中国农村统计年鉴2020[M]. 北京:中国统计出版社,2020.
[7]张兆国,李彦彬,王海翼,等. 马铃薯机械化收获关键技术与装备研究进展[J]. 云南农业大学学报(自然科学),2021,36(6):1092-1103.
[8]李紫辉,温信宇,吕金庆,等. 马铃薯种植机械化关键技术与装备研究进展分析与展望[J]. 农业机械学报,2019,50(3):1-16.
[9]李 娜,周 进,崔中凯,等. 山东省马铃薯生产全程机械化现状与对策建议[J]. 中国农机化学报,2019,40(1):198-204.
[10]窦青青,孙永佳,孙宜田,等. 国内外马铃薯收获机械现状与发展[J]. 中国农机化学报,2019,40(9):206-210.
[11]田 姣. 马铃薯主粮化战略背景下四川马铃薯种植户生产效率及种植意愿研究[D]. 雅安:四川农业大学,2018.
[12]刘崇林,赵胜雪,胡 军,等. 马铃薯机械发展趋势探讨[J]. 南方农机,2019,50(1):31,37.
[13]梁小菊,崔兆英. 对马铃薯作主粮的思考[J]. 现代农业科技,2015(12):115,117.
[14]崔元红,张俊芳,马德良. 马铃薯机械化垄作栽培技术[J]. 当代农机,2019(3):67-69.
[15]任永峰,路战远,赵沛义,等. 不同种植方式对旱地马铃薯水分利用及产量的影响[J]. 作物杂志,2019(5):120-124.
[16]Bangara B C,Dunne J P. Macroeconomic effects of commodity price shocks in a low-income economy:the case of tobacco in Malawi[J]. South African Journal of Economics,2018,86(1):53-75.
[17]方文熙. 美国农业机械化装备与发展趋势[J]. 福建农机,2016(2):48-52.
[18]Jafari M,Hemmat A,Sadeghi M. Development and performance assessment of a DC electric variable-rate controller for use on grain drills[J]. Computers and Electronics in Agriculture,2010,73(1):56-65.
[19]Auernhammer H. Off-road automation technology in European agriculture-state of the art and expected trends[C]//Automation Technology for Off-Road Equipment Proceedings of the 2004 Conference.St.Joseph,MI:American Society of Agricultural and Biological Engineers,2004.
[20]Iida M,Umeda M,Radite P A S. Variable rate fertilizer applicator for paddy field[C]//Annual International Meeting of the American Society of Agricultural Engineers.St.Joseph,MI:American Society of Agricultural and Biological Engineers,2001.
[21]Umeda M,Kaho T,Iida M,et al. Effect of variable rate fertilizing for paddy field[C]//Annual International Meeting of the American Society of Agricultural Engineers.St.Joseph,MI:American Society of Agricultural and Biological Engineers,2001.
[22]Batte M. Factors influencing the profitability of precision farming systems[J]. Journal of Soil and Water Conservation,2000,55:12-18.
[23]Wilkerson J B,Hancock J H,Moody F H,et al. Design of a seed-specific application system for in-furrow chemicals[J]. Transactions of the ASAE,2004,47(3):637-645.
[24]Sidorova V A,Zhukovskii E E,Lekomtsev P V,et al. Geostatistical analysis of the soil and crop parameters in a field experiment on precision agriculture[J]. Eurasian Soil Science,2012,45(8):783-792.
[25]郝集鑫. 约翰迪尔1830型播种机/1910型种肥车[J]. 现代化农业,2012(3):43.
[26]吴清分. Amazone公司ZA-M系列施肥机[J]. 农业工程,2017,7(2):18-20.
[27]才 源,崔向冬. 几种新型马铃薯田中耕机[J]. 新农业,2013(13):54-55.
[28]Costa C F,Melo P C,Guerra H P,et al. Soil properties and agronomic attributes of potato grown under deep tillage in succession of grass species[J]. Horticultura Brasileira,2017,35(1):75-81.
[29]Maleki M R,Ramon H,de Baerdemaeker J,et al. A study on the time response of a soil sensor-based variable rate granular fertiliser applicator[J]. Biosystems Engineering,2008,100(2):160-166.
[30]杨晓涵,温信宇. 马铃薯中耕机的研究现状与发展趋势[C]//马铃薯产业与健康消费(2019). 恩施:中国作物学会,2019:144-148.[HJ2mm]
[31]Hu J,Li X,Mao H. Magnetic field characteristic analysis for the magnetic seed-metering space of the precision seeder [J]. Transactions of The Chinese Society of Agricultural Engineering,2005,12(21):39-42.
[32]田 斌,韩少平,黄晓鹏,等. 2LZF-2型垄作马铃薯中耕施肥机的设计[J]. 机械研究与应用,2010,23(1):135-137.
[33]车 刚,张 伟,梁 远,等. 3ZFC-7型全方位复式中耕机的设计与试验[J]. 农业工程学报,2011,27(1):130-135.
[34]李 洋,杨德秋,李建东,等. 1304型马铃薯中耕机的研制[J]. 农业机械,2011(12):65.
[35]五征3ZM-4马铃薯中耕机[J]. 农机市场,2014(2):60.
[36]曹海峰. 3ZQ-10型中耕追肥起垄机的研究设计[J]. 农机使用与维修,2016(2):1-3.
[37]赵旭志. 3Z-1.6型垄作马铃薯中耕机设计与试验[J]. 农业工程,2016,6(3):87-91.
[38]吕金庆,尚琴琴,杨 颖,等. 1ZL5型马铃薯中耕机的设计与试验[J]. 农机化研究,2017,39(2):79-83.
[39]程鹏飞,王琳琳,李学强,等. 3ZMP-360型马铃薯中耕起垄施肥机的改进设计[J]. 农机化研究,2017,39(7):53-57.
[40]衣淑娟,孙志江,李衣菲,等. 马铃薯中耕前期圆盘式中耕机设计与试验[J]. 农业机械学报,2020,51(8):98-108.
[41]吕金庆,王英博,兑 瀚,等. 驱动式马铃薯中耕机关键部件设计与碎土效果试验[J]. 农业机械学报,2017,48(10):49-58.
[42]吕金庆,刘志峰,王鹏榕,等. 驱动式碎土除草多功能马铃薯中耕机设计与试验[J]. 农业工程学报,2019,35(10):1-8.
[43]王 莉,李庭贵. 基于三点悬挂的驱动式马铃薯中耕机设计与试验[J]. 农机化研究,2021,43(12):138-142.
[44]彭曼曼,吕金庆,兑 瀚,等. 驱动式马铃薯中耕机的设计与仿真分析[J]. 农机化研究,2019,41(3):58-63.
[45]孙 鹏,孔 皓,王 源,等. 丘陵山地马铃薯中耕施肥机设计与试验研究[J]. 中国农机化学报,2019,40(9):37-42.
[46]孙 鹏,沈 鹏,王 斌,等. 马铃薯中耕施肥机的设计与试验研究[J]. 农机化研究,2020,42(4):105-108.
[47]夏 敏,孙 鹏,孔 皓,等. 马铃薯中耕施肥机的设计与试验[J]. 甘肃农业大学学报,2020,55(3):190-197,205.
[48]沈 鹏,姚永亮,郑美英,等. 基于离散元的山地马铃薯排肥器仿真优化[J]. 江苏农业科学,2019,47(15):256-258.
[49]沈东华,孔 皓,姚忠志,等. 基于自激振动减阻原理的马铃薯培土器设计与试验[J]. 农机化研究,2022,44(6):163-168,175.
[50]孔 皓,宁楚峰,张永华,等. 单行马铃薯中耕追肥机的设计与试验[J]. 农机化研究,2022,44(9):74-79.
收稿日期:2022-11-21
基金項目:云南省重大科技专项计划(编号:2018ZC001-303);云南农业大学科技创新创业行动基金项目(编号:2022XGKX005)。
作者简介:陈立畅(1979—),女,湖南邵阳人,硕士,副教授,主要从事农业机械研究。E-mail:147791610@qq.com。
通信作者:张佳进,硕士,副教授,主要从事农业信息化研究。E-mail:zjjclc@ynau.edu.cn。
猜你喜欢
少儿科学周刊·儿童版(2021年21期)2021-12-11
陕西画报(2016年1期)2016-12-01
中国市场(2016年35期)2016-10-19
创新作文(小学版)(2016年31期)2016-03-11
福建农业科技(2015年3期)2015-02-27
吉林农业·下半月(2009年7期)2009-09-08
吉林农业·下半月(2009年6期)2009-07-31
吉林农业·下半月(2009年5期)2009-06-26
吉林农业·下半月(2009年4期)2009-05-22