基于自适应电流预测模型的LCL型三电平逆变器并联零序环流抑制策略
2023-10-24 13:47张铭洲王春霖蔡修闻李桂璞
机械与电子 2023年10期
张铭洲,赵 涛,王春霖,蔡修闻,李桂璞
(南京工程学院,江苏 南京 211167)
0 引言
近年来,随着“30·60双碳”目标的逐步推进与落实,采用风、光等新能源的分布式电源的发电量逐步提高,逆变器的并联系统广泛应用于大功率配电网环境[1]。尽管并联系统可以提供更大的功率输出,但是其输出电能质量将受限于共直流母线连接方式所带来的零序环流。针对逆变器并联系统中零序环流抑制的问题,国内外学者展开了相关的研究,其解决方法可分为2大类,分别为增大零序环流回路之间阻抗和控制零序环流激励源。前一种方法最为直接,但是需要逆变器并联系统增加额外的体积和成本,同时也会加大逆变器的内部损耗[2]。因此,在实际应用中采用通过控制零序环流激励源降低零序环流是最常见的方法。
文献[3]指出逆变器并联系统之间的共模电压差是零序环流的激励源;在此基础上,文献[4]利用零序环流反馈控制方法,同时实现了对逆变器环流和谐振的有效控制;文献[5]采用了共模电压和零序环流相结合的控制手段对零序环流进行抑制,但是对其直流侧中点电位控制采用了额外的电流回路进行控制,增加了并联系统成本。上述方法都不可避免地使用了复杂的调制手段,增加了数字控制器的负担。得益于数字信号处理器的高速发展,模型预测控制技术在电力电子领域逐渐发展、成熟[6]。文献[7]对三电平逆变器中小矢量进行分析,利用其冗余性通过权函数筛选控制中点电位和零序环流,但是该二者分别属于逆变器的内外特性,在保证中点电位的同时难以兼顾零序环流的抑制效果;文献[8]采用了在权函数中加入零序环流控制项,实现逆变器并联系统的环流抑制,但是该模型预测方法中,控制目标多,权重因子整定复杂,增加了控制器设计的复杂程度。然而,模型预测的控制效果极大程度上取决于模型参数的匹配程度。在实际工程中,电子器件的参数易受到电气热老化以及铭牌标识误差等外部因素影响[9];另一方面,随着分布式能源渗透率变高,实际电网逐步呈现弱电网特性,电网阻抗变得不可忽略,同时与逆变器等效输出阻抗进行耦合,进一步影响逆变器工作的稳定性。因此,减少模型预测控制对于模型参数的依赖性势在必行。
文献[10]提出了一种在参数失配情况下,利用参数观测器在线修正预测模型参数的方法,该方法可以显著减少参数失配所带来的影响,提高了并网电流质量,但是该方法计算量较大,并且对于参数观测器的观测精度也有很高的要求;文献[11]为避免并网控制因参数失配所带来的影响,提出了一种基于梯度优化的参数观测方法,实验证明该方法可显著改善电能质量和电网电流的跟踪性能。
本文提出一种基于自适应电流预测模型的三电平逆变器并联零序环流抑制策略,该策略适用于LCL型逆变器,同时具有高质量的电能输出。
1 并联系统零序环流分析
共直流母线并联T型三电平逆变器系统拓扑结构如图1所示。图中,Cjx(x=1或2;j=P或N)为第x个逆变器的直流侧支撑电容;L1为机侧滤波电感;C为滤波电容;L2为网侧滤波电感;Ox和N分别为直流母线和电网的中性点。

图1 并联T型三电平逆变器系统拓扑结构
通过Kirchhoff电压定律,可得并联系统回路方程为
(1)
Udc为直流电源;ΔUx为T型三电平逆变器正负支撑电容电压差;unxOx(n=a,b,c)为逆变器对直流母线中性点输出电压;inx1为机侧三相电流;inx2为网侧三相电流。
三相系统对称,根据零序环流定义,并联系统中的零序环流iZ可表示为
(2)
iZx为逆变器的零序环流。
根据共模电压定义,并联系统中的共模电压uCMV可表示为
(3)
uCMVx为逆变器的共模电压。
将式(2)、式(3)代入式(1),则并联系统回路方程可重新表示为
(4)
式(4)即为并联系统零序环流数学模型,其等效电路如图2所示。

图2 并联系统零序环流等效电路
由图2可知,并联逆变器系统的正负支撑电容电压差以及共模电压差均为系统零序环流的激励源。由此可见,通过增加系统回路之间的阻抗可以减少逆变器之间的零序环流,但是该方法将增加逆变器体积和制作成本。因此,本文将对上述激励源进行控制,从而抑制并联系统间的零序环流。
2 并联系统零序环流抑制策略
2.1 正负支撑电容电压差控制
参考图1中单台T型三电平逆变器拓扑结构,在两相静止坐标系下的平均模型可以表示为
(5)
iαβx1和iαβx2分别为在两相静止坐标系下机侧电流和并网电流;uαβxo和uαβxC分别为在两相静止坐标系下的输出电压和滤波电容电压;eαβ为在两相静止坐标系下的电网电压;Ts为采样周期;k∈N,为离散时间的步长。
同理,直流环节的电容电压动态过程的平均模型可以表示为
(6)
ijx为流过直流侧电容的电流,通过引入的开关状态变量函数Hxnj可以表示为
(7)
idcx为直流母线电流。对上述开关状态变量函数Hxnj建立如下定义,即
(8)
Sxn为T型三电平逆变器的n相开关状态,其1、0、-1分别为开关状态“N”、“O”、“P”。故该三电平逆变器共有27个开关状态组合,即27个基本电压矢量,其定义如表1所示,大小分布如图3所示。

表1 T型三电平逆变器开关状态定义

图3 T型三电平逆变器基本电压矢量分布
以机侧电流、并网电流以及中点均压为控制目标,构建权函数G,表达式如式(9)所示。通过遍历方式,遴选出使得G最小的电压矢量作为最优矢量,同时将其对应的开关状态作用于并网逆变器。
λ|UPx(k+1)-UNx(k+1)|
(9)

x(k+1)=3x(k)-3x(k-1)+x(k-2)
(10)
一般情况下,为抑制LCL滤波器所带来的谐振,通常采取滤波电容电压反馈的有源阻尼策略,即
(11)
(12)
edq为两相旋转坐标系下的电网电压。
2.2 共模电压差控制
由第1节分析可知,并联逆变器系统之间的共模电压差为零序环流的激励源之一。由式(4)可以看出,若需抑制零序环流,则在2.1节保证正负支撑电容电压为直流母线电压一半的基础上,进一步控制系统共模电压差为0即可。根据式(3)可知,T型三电平逆变器基本电压矢量与共模电压对应关系,如表2所示。
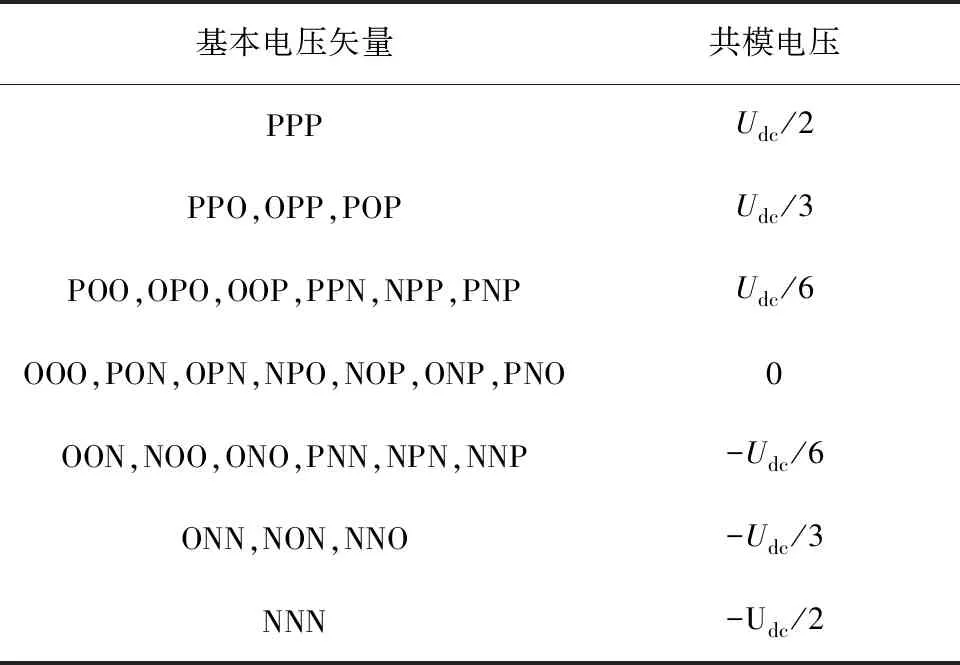
表2 T型三电平逆变器基本电压矢量与共模电压对应关系
在传统三电平逆变器电流预测模型中,通常会将以上27个基本电压矢量均投入权函数遍历寻优,因此逆变器所输出的共模电压将随着开关的快速切换而变化,并联系统中的共模电压差将产生高频波动。故本文将选取仅产生共模电压为0的基本电压矢量作为候选矢量,以避免共模电压差的波动,从而抑制零序环流的产生。
共模电压控制策略基本电压矢量切换方案如图4所示,参与控制的电压矢量包含了1个零矢量与6个中矢量。采用该切换方案的逆变器输出最大相电压幅值为Udc/2,是传统电流预测和SVPWM方法的0.866,但是对于新能源系统,这种限制不会成为问题,通过串联储能单元可以十分简单有效地提高直流侧电压。

图4 共模电压控制策略基本电压矢量切换方案
3 自适应电流预测控制策略
3.1 参数失配对并网电流预测模型精度的影响
由式(5)可知,预测模型的精度依赖模型参数与实际物理参数的匹配程度,如果参数失配时,会导致输出预测值不准确,从而进一步影响整个系统的控制效果。
为分析参数失配对并网电流预测模型精度的影响,设ΔL1、ΔC、ΔL2分别对应机侧滤波电感误差、滤波电容误差、网侧滤波电感误差,则可以将式(5)中iαβx2(k+1)改写为
(13)
将式(13)和式(5)中iαβx2(k+1)作差,由于两式分母不同,无法化简,故将得到的并网电流预测误差整理为
Δiαβx2(k+1)=f[ΔL1,ΔC,
ΔL2,iαβx1(k),uαβxC(k),iαβx2(k)]
(14)
由式(14)可知,并网电流误差与机侧滤波电感误差、滤波电容误差和网侧滤波电感误差以及当前k时刻的机侧电流、滤波电容电压、并网电流有关。
LCL滤波器参数失配下的四维并网电流误差效果如图5所示。从图5中可以看出当参数匹配时,并网电流几乎不存在误差,当3个参数均偏小时,误差达到最大。此外,相比机侧滤波电感L1、网侧滤波电感L2和滤波电容C对并网电流误差影响较大。
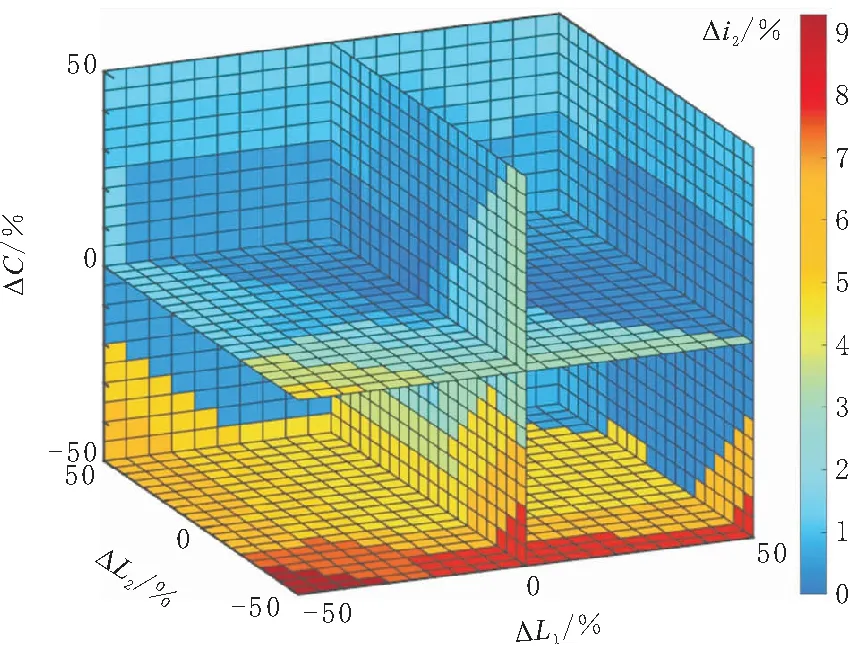
图5 参数失配下的并网电流误差效果
由此可以得出结论,电流预测控制对于模型参数依赖性大,一旦电子器件参数偏离控制策略中的模型参数,预测并网电流就会产生预测误差,从而降低电能质量。因此,为了提高处于参数失配情况下的电流预测模型精度,研究一种自适应电流预测控制策略是十分有必要的。
3.2 超局部建模的电流预测控制
引入3.1节中的滤波器参数失配情况重新定义LCL型三电平逆变器数学模型,即
(15)
εαβx为α、β轴下的过程噪声干扰以及部分未知噪声干扰。重新整理式(15)可得
(16)
依据超局部理论构建系统模型,可将式(16)进一步写为
(17)
η1、η2、η3分别为逆变器输出电压比例系数、机侧电流比例系数、滤波电容电压比例系数,η1通常取1/L1,η2通常取1/C,η3通常取1/L2;Λαβx1、Λαβx2、Λαβx3分别为对应模型的集总扰动。
3.3 基于Kalman观测器的集总扰动计算
由式(17),对于集总扰动Λαβx1、Λαβx2、Λαβx3的实时更新、计算是实现自适应电流预测控制的关键。为此,针对上述LCL型三阶超局部模型,本文提出一种基于Kalman观测器的集总扰动计算方法。
对式(17)进行离散化处理,可得
(18)
如果观测器的动态过程比扰动的变化快得多,则可假设在每个采样间隔内,扰动的变化接近0,即
(19)
依据式(18)形式构造Kalman观测器,即
(20)
变量上方“^”为该变量的估计值;X(k)为机侧电流、并网电流以及集总扰动的合成矢量,所对应的系统状态矩阵为A;U(k)为逆变器输出电压和滤波电容电压的合成矢量,所对应的系统输入矩阵为B;Y(k)为输出变量,所对应的系统输出矩阵为H;w(k)和v(k)分别为系统的过程噪声和传感器的检测噪声,一般为均值为0的白噪声。
4 逆变器并联系统控制策略
根据以上分析,本文提出一种基于自适应电流预测模型的LCL型三电平逆变器并联零序环流抑制策略,其系统的控制结构如图6所示。

图6 控制结构
首先,采集滤波电容电压、机侧电流和并网电流,通过坐标变换作用于离散预测模型,经过Kalman观测器得到最优估计电流与集总扰动,计算得出k+1时刻下的中点电容电压以及7个电压矢量下所对应的预测电流。最后,通过权函数比较寻优,与目标误差最小的最优电压矢量,并在下一时刻作用于逆变器。
5 仿真验证
为了验证本文所提控制策略的有效性,在MATLAB/Simulink中搭建仿真平台,并进行详细的研究。仿真模型参数如表3所示。


图7 逆变器#1并网电流及THD值
图8给出了并联系统中零序环流波形,实线和虚线分别表示逆变器#1和逆变器#2的零序环流,可以看出环流最大值为0.04 A,处于较低水平,可使并联系统稳定运行,大大提高输出的电能质量。

图8 零序环流
图9给出了单台逆变器的直流侧支撑电容电压,实线和虚线分别表示电容CP1和CN1的电压,可以看出由于使用了1个零矢量与6个中矢量的基本电压矢量组合,中点电压围绕直流电压源的一半375 V做上下1 V波动,处于动态平衡状态。
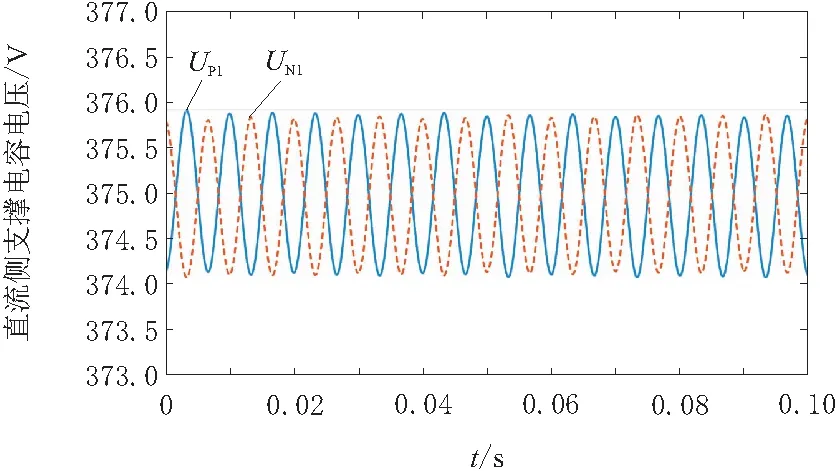
图9 逆变器#1直流侧支撑电容电压
为了验证本文所提控制策略的有效性,在模型参数失配的情况下,与传统电流预测控制策略进行控制性能对比分析。当仿真开始时,采用常规电流预测控制策略,在仿真时间为0.1 s时,将控制策略切换为本文所提控制策略。参数失配情况下三相并网电流对比如图10所示。

图10 参数失配情况下三相并网电流对比
从图10可以看出,在参数失配情况下,常规电流预测控制的三相并网电流包含谐波较大;然而通过本文所提控制策略,三相并网电流包含谐波变小。
仿真结果定量汇总如表4所示。从表4中可看出,在参数失配+50%情况下,通过常规电流预测控制,并网电流误差为0.33 A,通过本文所提控制策略可将该误差控制在0.19 A,三相电流THD值从2.23%降低至0.80%;在参数失配-50%情况下,通过常规电流预测控制,并网电流误差为1.87 A,通过本文所提控制策略可将该误差控制在0.75 A,三相电流THD值从3.90%降低至1.61%。

表4 仿真结果
6 结束语
本文提出了一种适用于LCL型三电平逆变器并联系统下的零序环流抑制策略,采用自适应电流预测模型减少电流预测中参与控制的模型参数,以提高控制策略的鲁棒性。利用权函数以控制直流侧支撑电容电压差,同时选取7个不产生共模电压的基本电压矢量参与遍历寻优,进一步控制共模电压差以抑制并联系统中零序环流,仿真结果证明了该方法的有效性。
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
电子测试(2018年14期)2018-09-26
数学物理学报(2018年2期)2018-05-14
儿童故事画报·智力大王(2016年6期)2016-09-14
设备管理与维修(2016年7期)2016-04-23
通信电源技术(2016年5期)2016-03-22
电测与仪表(2014年5期)2014-04-09
电测与仪表(2014年20期)2014-04-04
郑州大学学报(理学版)(2014年4期)2014-03-01
河南科技(2014年18期)2014-02-27