
Micro-Newton scale variable thrust control technique and its noise problem for drag-free satellite platforms: a review
2023-10-24 01:43:16ChangyiXUWenyaLIXuhuiLIUYongLIChaoZHANG
Changyi XU, Wenya LI, Xuhui LIU, Yong LI, Chao ZHANG
Review
Micro-Newton scale variable thrust control technique and its noise problem for drag-free satellite platforms: a review

1School of Control Science and Engineering, Dalian University of Technology, Dalian 116024, China2Beijing Institute of Control Engineering, Beijing 100190, China3State Key Laboratory of Fluid Power & Mechatronic Systems, School of Mechanical Engineering, Zhejiang University, Hangzhou 310058, China
High-precision detection in fundamental space physics, such as space gravitational wave detection, high-precision earth gravity field measurement, and reference frame drag effect measurement, is the key to achieving important breakthroughs in the scientific study of fundamental space physics. Acquiring high-precision measurements requires high-performance satellite platforms to achieve “drag-free control” in a near “pure gravity” flight environment. The critical technology for drag-free control is variable thrust control at the micro-Newton scale. Thrust noise is the most important technical indicator for achieving drag-free flight. However, there is no literature about the current status and future prospects of variable thrust control based on thrust noise. Therefore, the micro-Newton variable thrust control technology and the thrust noise of the drag-free satellite platform are reviewed in this work. Firstly, the research status of micro-Newton scale variable thrust control technology and its applications to drag-free satellite platforms are introduced. Then, the noise problem is analyzed in detail and its solution is theoretically investigated in three aspects: “cross-basin flow problem,” “control problem,” and “system instability and multiple-coupled problem.” Finally, a systematic overview is presented and the corresponding suggested directions of research are discussed. This work provides detailed understanding and support for realizing low-noise variable thrust control in the next generation of drag-free satellites.
Space physics detection; Satellite platforms; Drag-free control; Micro-Newton scale variable thrust; Thrust noise
1 Introduction
The key to determining whether the study of the fundamental physics of space can make a significant advance is the detection of space's basic physical quantities, such as the detection of gravitational waves in space (Bar-Kana, 1994; Wang YK et al., 2021), high-precision measurements of the earth's gravity (Fig. 1a) (Ziegler and Blanke, 2002; Canuto, 2008; Cesare et al., 2010; Luo ZR et al., 2020), and the measurement of the reference frame drag effect (Fig. 1b) (Canuto and Massotti, 2009; Zhang et al., 2016; Iorio, 2019). The non-conservative forces of the atmosphere can be balanced by giving the satellite platforms a micro-Newton scale minimal thrust (Yu et al., 2021). Such platforms require micro-Newton scale cold gas variable thrust control (MVTC) technology (Gao et al., 2014; Tummala and Dutta, 2017) with extremely low noise and high resolution (Cui et al., 2018). The platforms must have residual disturbance acceleration noise in the measurement frequency band of less than 1×10-15m/(s2·Hz1/2) (Schleicher et al., 2018) to accurately detect new generation space fundamental physics data. The technology is necessary to achieve "drag-free control," almost "pure gravity" flight conditions (Canuto, 2008; Dittus et al., 2008; DeBra and Conklin, 2011; Anderson et al., 2018), and to meet the payload's technical specifications for an ultra-static working environment for the satellite platform (Anzalchi and Harverson, 2007; Tinto et al., 2015; Li WJ et al., 2019). The smallest atmospheric disturbances (Giacaglia and Marcondes, 2007), solar pressure (Niu et al., 2022), cosmic rays, and other non-conservative forces will be countered by this technology.
MVTC is the key technology that needs to be solved for the new generation satellite platforms. The core indicators of variable thrust regulation technology to meet residual disturbance acceleration noise requirements include (Yang et al., 2012; Nguyen and Conklin, 2015; Li Y et al., 2019; Zou et al., 2023): (1) thrust noise better than 0.1 μN/Hz1/2over the frequency bandwidth of 0.1 mHz–1 Hz at a thrust of 0.1–1000 μN; (2) thrust resolution of 0.1 μN; (3) thrust adjustment range of 0.1–1000 μN.
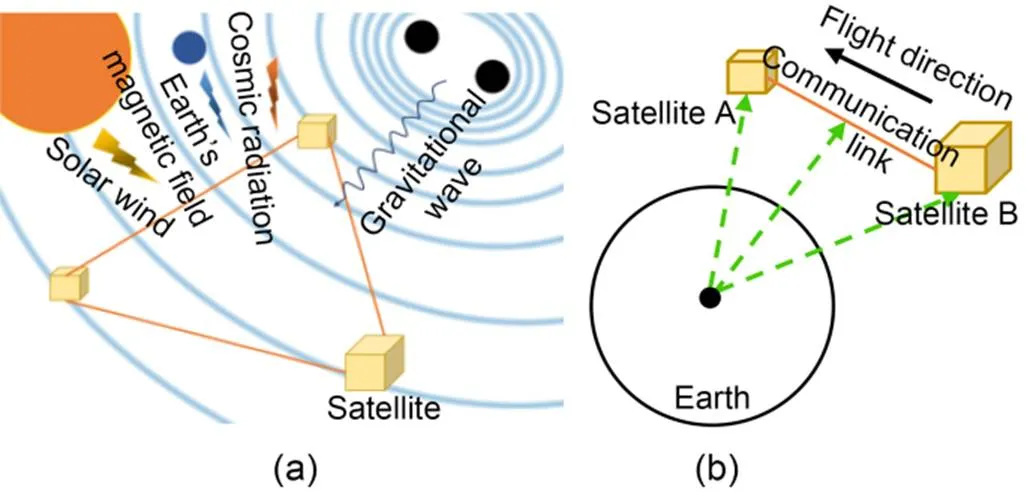
Fig. 1 Example of the detection of space's fundamental physical properties: (a) schematic of the detection of gravitational waves in space; (b) schematic of the detection of the earth's gravity in space
There is still a large gap between MVTC technical indicators for the thrust range of 0.1–1000 μN (Zhang et al., 2021), thrust noise of 0.1–0.3 μN/Hz1/2over the frequency bandwidth of 30 mHz–1 Hz (Luo J et al., 2020), and the actual demand. The technical difficulties arise mainly from the high complexity of the underlying scientific issues involved and the interdisciplinary nature of the necessary approach (Robert et al., 2022). In particular, an in-depth understanding of the mechanism of microscale fluid flow with prominent nonlinear characteristics of micro-nozzles is required (Ding et al., 2004; Weinert et al., 2008; Sukesan and Shine, 2021). Without it there is an inability to model accurately and pre-analyze the regulation system. Existing linear control methods cannot meet the requirements of accurate regulation of micro-scale fluid flow and the realization of highly accurate and stable regulation of thrust is thus restricted.
Thrust noise (Cui et al., 2020), a systematic and comprehensive indicator parameter, is the MVTC technology's primary evaluation indicator (Cui et al., 2021). It is also related to the thrust range and resolution (Liu et al., 2022). It is characterized by the thrust information's power spectral density in the time domain. Thrust noise is a random fluctuation superimposed on the effective thrust. As the thrust increases, thrust noise also tends to increase. Space applications usually require thrust noise to be below a certain threshold across the entire thrust range in a particular frequency domain, with the ability to regulate it accurately over a wide frequency range of 0.1 mHz–1 Hz. The development of noise suppression technology is limited because the mechanism of thrust noise formation and the physical factors affecting the law still need to be clarified.
Aiming at the main challenge of thrust noise, an overview of MVTC technology for drag-free satellite platforms is studied. As the thrust noise mainly arises from the cross-basin flow problem, the control problem, and the system instability problem, this work is organized as follows. Section 1 is the background and research motivation. Section 2 is an introduction to MVTC technology in general. It first introduces the basic principle of MVTC and its application status in satellite platforms. Then, Sections 3–5 are detailed analyses of the MVTC technology from three different aspects of the thrust noise. Specifically, Section 3 introduces the MVTC technology's cross-basin rarefied gas flow problem. Section 4 studies the status of MVTC's control method and the corresponding control problem as well as the attempted noise-reducing method. Based on Sections 3 and 4, Section 5 studies the closed-loop feedback measurement instability, the system drive actuator instability, and the coupling noise in the cross-basin flow environment. Finally, in Section 6, the conclusions are drawn and perspectives are discussed in detail. It is hoped to guide and support the breakthrough of MVTC technology by means of an improvement in technical specifications, and to provide a theoretical basis for developing the next generation of high-performance MVTC.
2 MVTC technology for drag-free satellite platforms
In this section, the fundamental mechanism of MVTC technology and the generation of the thrust noise are introduced first, followed by the MVTC's application to drag-free satellite platforms.
2.1 Generation of the thrust noise in MVTC
The MVTC device structure (Fig. 2) consists primarily of micro-thruster, controller, and micro-valve drive components. According to preliminary China National Space Administration (CNSA)'s research results, the generation of thruster noise is a systemic problem. This issue is mainly attributed to the following factors: (1) flow fluctuations within the nozzle; (2) instability in the closed-loop control due to measurement feedback and the drive actuator itself; (3) coupling noise in the cross-basin flow instability. It can be considered that the generation of thrust noise is divided into three processes: (1) the flow measurement feedback noise and precise fluid drive proportional valve action noise are transmitted in the control loop; (2) it is transmitted to the fluid in the micro nozzle tube through oscillation of the micro-valve; (3) the fluid transmits the micro-valve action oscillation downstream through the cross-basin flow mechanism, ultimately creating thrust noise.
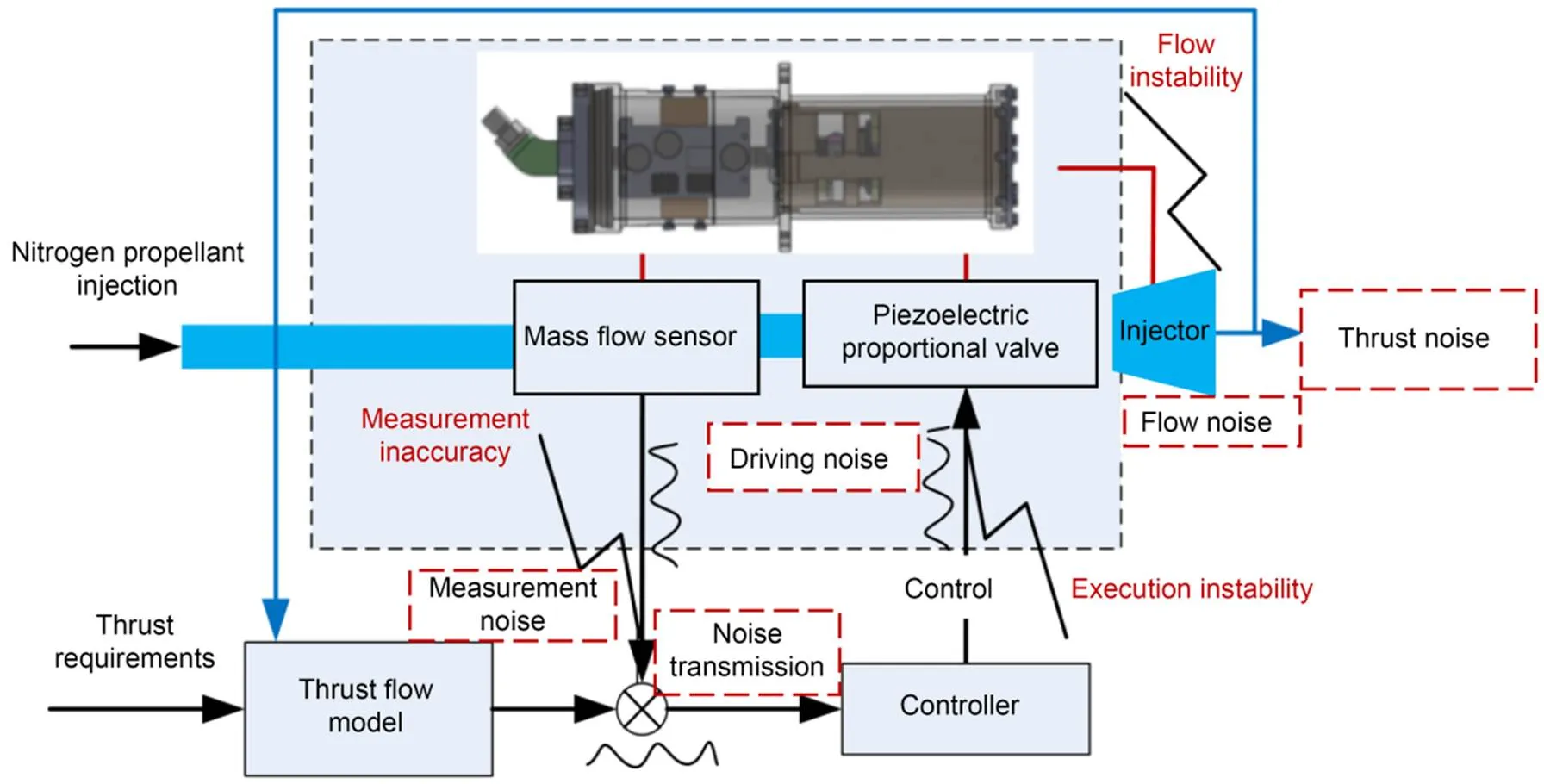
Fig. 2 Schematic diagram of the MVTC and noise transfer
2.2 MVTC applied on drag-free satellite platforms
MVTC uses inert gases such as nitrogen, argon, and helium as the working media (Ranjan et al., 2017; Xu XM et al., 2017; Ranjan et al., 2018). It is of stable thrust (Song et al., 2019), high resolution, and low thrust noise, and has an extensive adjustable range. These excellent technical advantages give it a wide application in drag-free satellite platforms. Lange (1964) first proposed to solve the offset of disturbance forces and moments on satellite platforms using drag-free control techniques. After decades of accumulation and development in variable thrust control and payload technology (Collingwood et al., 2009; Hey, 2018; Mao and Wu, 2023), drag-free control technology has been applied on several model missions, including European Space Agency (ESA)'s gravity recovery and climate experiment (GRACE) (Christophe et al., 2015), the gravity field and steady-state ocean circulation explorer (GOCE) (Sechi et al., 2011), microscope (Pittet, 2007), laser interferometer space antenna (LISA) Pathfinder developed by National Aeronautics and Space Administration (NASA) and ESA (Cesare et al., 2016; Armano et al., 2019; Korol et al., 2020), and the CNSA's Tianqin-1 satellite (Luo et al., 2016) (Fig. 3).
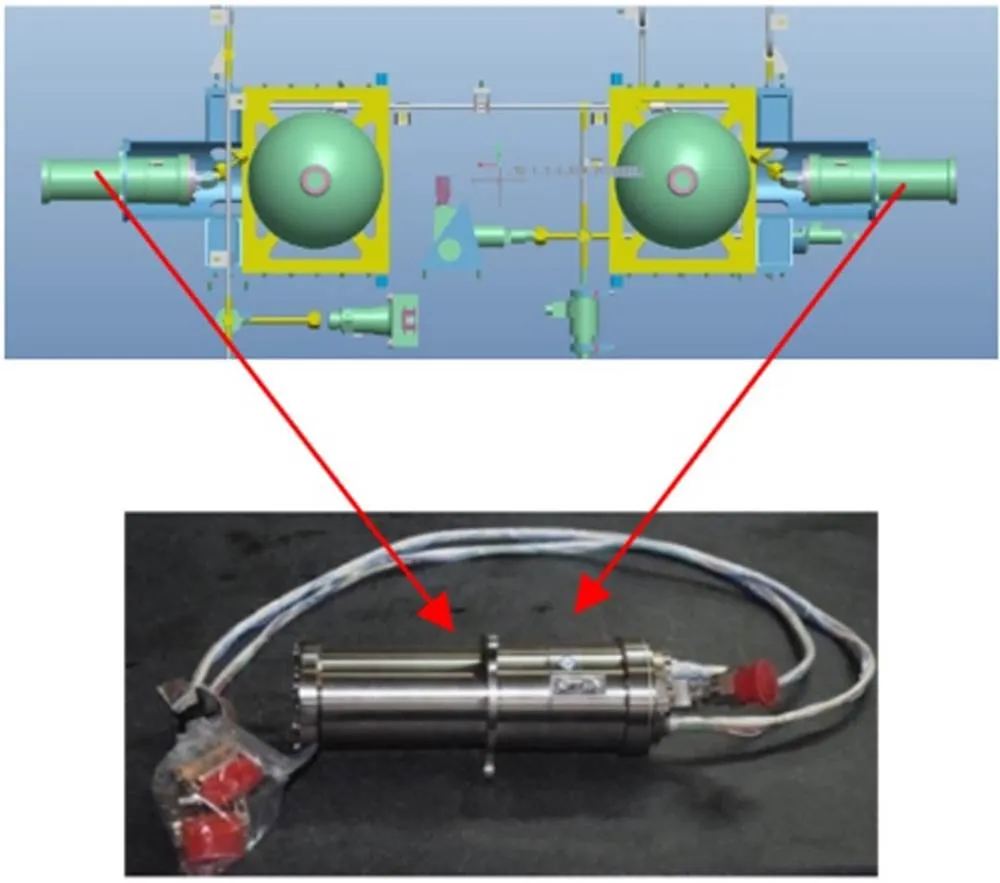
Fig. 3 Physical picture of MVTC device
Currently, NASA and ESA are planning and developing the next generation of ultra-high precision drag-free control satellite platforms, including next generation gravity mission (NGGM) with MVTC as the preferred technology (Cesare et al., 2016; Bacchetta et al., 2017; Armano et al., 2018; Strugarek et al., 2019) and LISA with the aim of suppressing residual disturbance acceleration noise to less than 1×10-14m/(s2·Hz1/2) over the frequency bandwidth of 0.1 mHz–1 Hz (Bortoluzzi et al., 2021; Burderi et al., 2021). However, the current residual disturbance acceleration noise is about 3×10-9m/(s2·Hz1/2) at 0.1 Hz (Luo J et al., 2020). Thus, the current noise rejection level of MVTC is still far from the requirements of the next generation of space science exploration missions. The high-precision drag-free control of future spacecraft MVTC metrics requires, from a physical time domain perspective, a time scale of 10000 s over the entire thrust range, with very high thrust stability and control accuracy. This is technically challenging and so, in order to address the thrust noise problem, the next sections of this work focus on thrust noise and its generation and suppression.
3 Cross-basin rarefied gas flow problem of MVTC
For the problem of cross-basin rarefied gas flow with minimal thrust, this section first introduces the cross-basin rarefied gas flow problem. We then analyze the four main effect factors of micro nozzle cross-basin flow. Finally, we introduce the thrust noise phenomena generated by micro nozzle gas flow fluctuation.
3.1 Cross-basin rarefied gas flow problem
Micro-Newton cold gas drive systems with piezoelectric drivers have a cross-basin rarefied gas flow problem. This problem arises mainly in micro devices such as micro nozzles.
Fig. 4 shows the structure of the cold gas micro thruster and micro nozzle. The piezoelectric driver can realize rapid response control of the pin displacement with nano-level accuracy. Moreover, the piezoelectric driver can adjust the flow in the throat of the micro nozzle with high precision. It can ensure the minimum thrust output of 0.1 μN, and is one of the most promising methods. Typically, a double-layer composite material is used in the downstream region of the micro nozzle throat to create a microfluidic channel with a sizeable length-diameter ratio (length-diameter ratio>10). This structure ensures the thruster's sealing reliability and environmental adaptability.
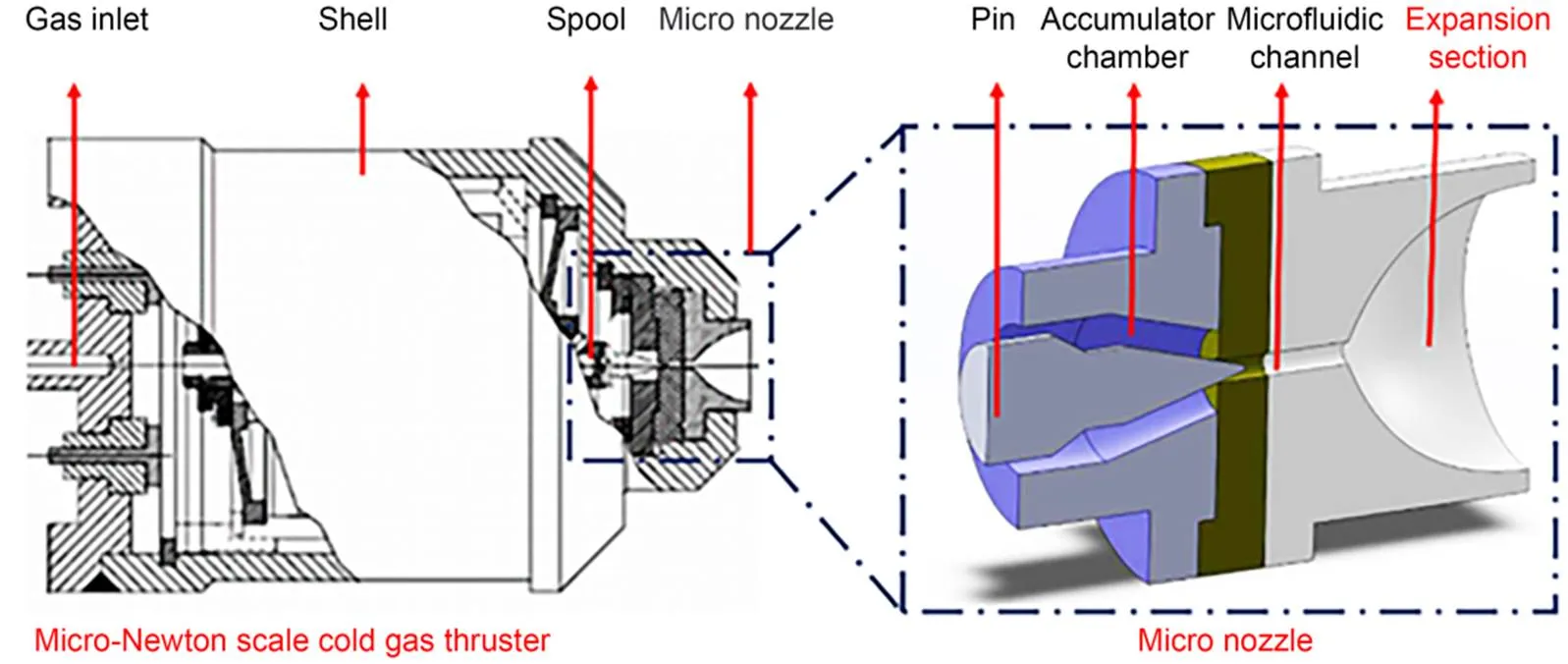
Fig. 4 Section structure of cold gas micro thruster and micro nozzle
The design of the cold gas propulsion system has cross-basin gas flow problems. The nitrogen pressure values at the inlet and outlet of the micro nozzle were reduced from 0.1 MPa to the vacuum state, and the average free travel distribution of gas molecules was wide (1×102nm–1×10-3m). The difference in the order of magnitude between the Knudsen numbers () in the micro nozzle is more than 1×104. The flow has four states: continuum region, slip region, transition region, and free molecular flow (Liu et al., 2023). As shown in Fig. 5, its flow mechanism covers the four flow states from continuous to free molecular flow.
Overall, the problem of cross-basin microscale rarefied gas flow is usually caused by micro-nano devices such as micro nozzles, micro-heat exchangers, and micro-gas flow sensors. Transforming the above problems into physical problems, the rarefaction factor, wall factor, inner-wall roughness factor, and fluid-solid heat transfer factor can affect the generation of a cross-basin rarefied gas flow problem (Grm et al., 2011). Details will be presented in the analysis of the cross-basin rarefied gas flow problem in Section 3.2.
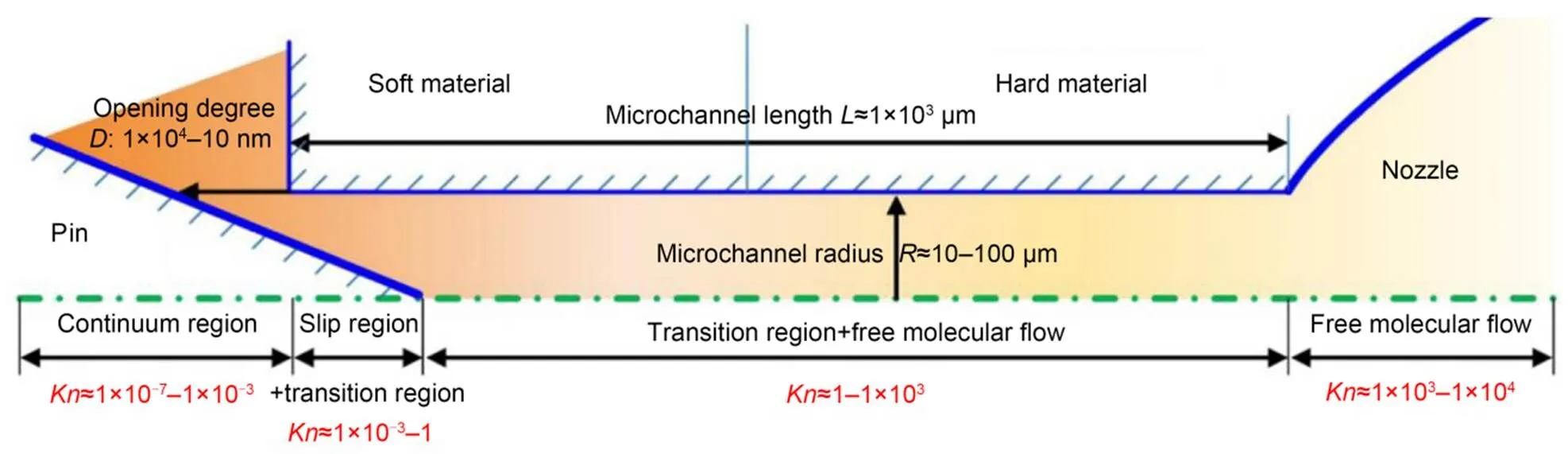
Fig. 5 Cross-basin flow mechanism in micro nozzle (half-profile schematic)
3.2 Analysis of the cross-basin flow
The influencing factors of the cross-basin flow of micro nozzles mainly include the rarefaction effect, wall effect, inner-wall roughness effect (Liu and Fan, 2010), and fluid-solid heat transfer effect. These four main factors are discussed below.
3.2.1Rarefaction effect
The rarefaction effect is one of the essential factors affecting microscale flow. la Torre et al. (2011) found that the rarefaction effect reduced the thrust output, using a Navier–Stokes/direct simulation Monte Carlo (NS/DSMC) (Zeng et al., 2023) hybrid solution method. Thenumber is used to characterize the gas flow thinning effect (Sun et al., 2009), defined as the ratio of the average free travel of gas molecules to the flow geometric feature length. According to different, flows are divided into the following four mechanisms: continuum flow (≤0.01), slip flow (0.01<≤0.1), transition flow (0.1<<10), and free molecular flow (≥10) (Rosa et al., 2009; He et al., 2021). With the increase of thenumber, the wall slip speed and temperature step degree continue to increase and that significantly impacts the microfluidic channel's momentum and energy transfer (Le et al., 2019).
3.2.2Wall effect
Compared with the macro-scale structure, the micro-scale structure has a larger surface-to-volume ratio and the wall effect will significantly impact the momentum and energy transfer of the flow. Varade et al. (2015) showed that viscous shear force is a significant factor in the pressure drop of the extended microfluidic channel. Due to the weakening of convection, the wall friction coefficient increases with the. When>1, the gas density pulsation weakens, and the diffusion transport is proportional to the pressure gradient. Increasing the surface-to-volume ratio of the microfluidic channel increases the wall friction coefficient, Nusselt number (Zhang et al., 2020), and sensitivity to the(Renksizbulut et al., 2006).
3.2.3Inner wall roughness effect
The inner wall roughness of the micro nozzle of a micro-Newton scale cold gas thruster is about 4%. According to macro-scale flow studies, when the relative roughness of the wall surface is less than 5%, the effect of roughness on the friction coefficient is negligible (Ji et al., 2006). However, in microfluidic channels, even minor wall roughness can still impact rarefied gas flow and heat transfer. Khezerloo et al. (2021) measured flow and heat transfer processes in microfluidic channels at a roughness of 3.55%. They found that the influence of roughness on friction coefficient and heat transfer coefficient was very significant. In addition, other researchers have found greater influence of the wall roughness. On the one hand, the wall roughness will change the pressure gradient distribution and reduce the outlet gas velocity and total pressure. On the other hand, it reduces the mass flow and Nusselt number, changes the flow boundary layer thickness, and increases the flow resistance (Shams et al., 2009; Cai et al., 2016).
3.2.4Fluid-solid heat transfer effect
Fluid-solid heat transfer (Zhang et al., 2018) is another crucial factor to be considered in studying the cross-basin flow of a micro nozzle. When the satellite is in orbit, the thruster will undergo drastic temperature changes under solar radiation. This situation will affect the energy transfer between the micro nozzle and the internal fluid. Louisos and Hitt (2007) used numerical simulation methods to study that. They found that the heat loss of the fluid reduces the viscosity effect and the subsonic boundary layer scale, and changes the thrust performance. Alexeenko et al. (2006) used the DSMC method to find that the adequate viscous boundary layer thickness of the internal flow of micro-electromechanical system (MEMS) thrusters increases with the fluid temperature. Hameed et al. (2013) also found that wall cooling reduces subsonic boundary layer thickness and viscosity loss in the micro nozzle (Fig. 6a). Moríñigo and Hermida-Quesada (2010) and Rafi et al. (2019) all showed that the microscale nozzle needs to consider the gas-solid wall effect because gas-solid heat transfer will, when coupled with viscous and rarefied effects, change the thickness of the subsonic layer and ultimately affect the thrust performance (Fig. 6b).
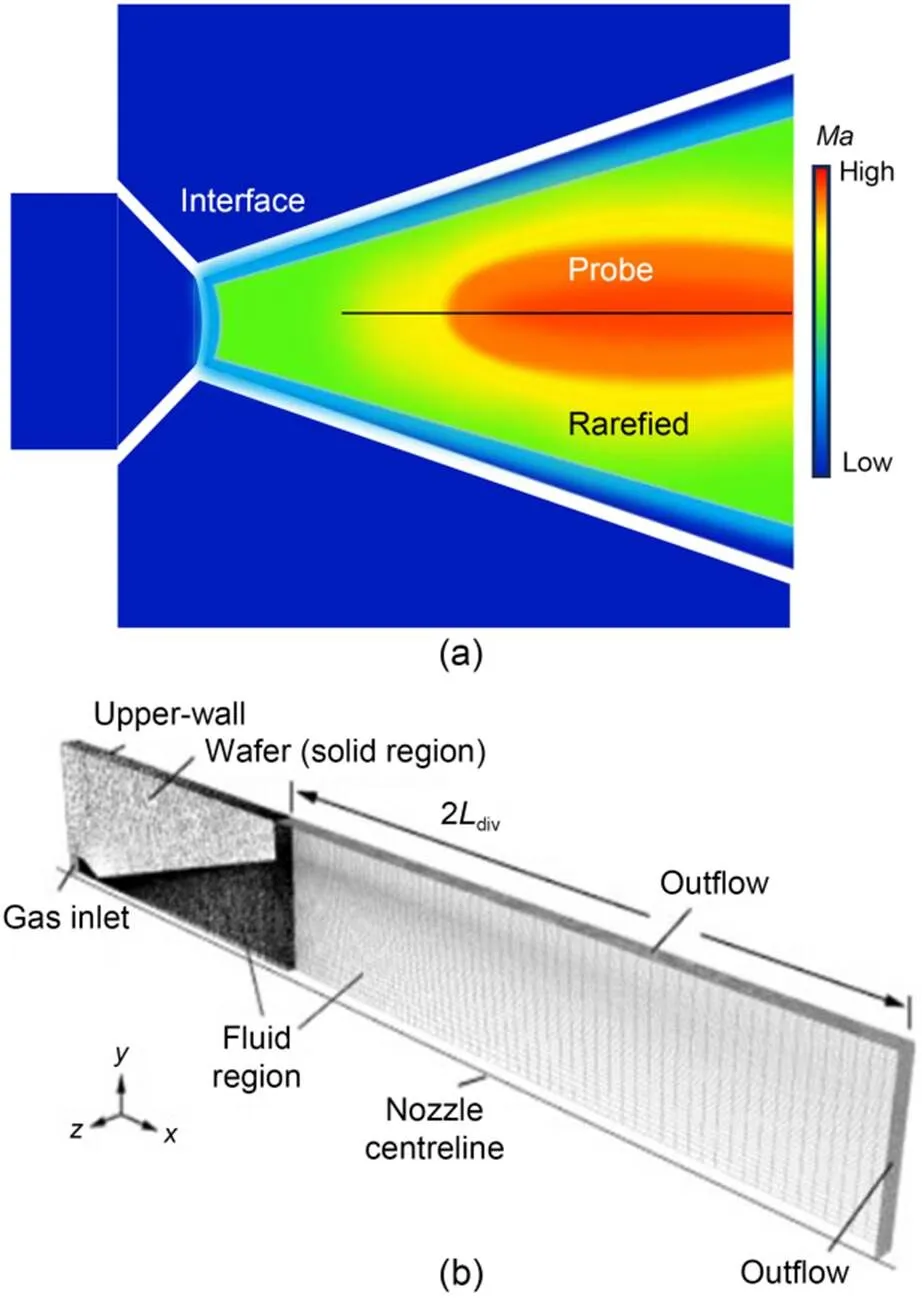
Fig. 6 Effect of wall temperature on subsonic boundary layer and thrust in a micro nozzle: (a) rarefied and continuous flow zones; (b) layout of the 3D computational domain, that exploits the symmetry planes of the nozzle (reprinted from (Moríñigo and Hermida-Quesada, 2010), Copyright 2010, with permission from Elsevier). Ldiv is the divergent length
As seen above, the cross-basin rarefied gas flow problem is influenced by a combination of the rarefaction effect, wall effect, inner wall roughness effect, and fluid-solid heat transfer effect. There are complex multi-physics domain issues involved, which in a cold gas propulsion system can produce airflow fluctuation effects that cause thrust noise. This will be discussed in Section 3.3.
3.3 Thrust noise phenomena: airflow fluctuation
As introduced in Section 3.2, airflow macroscale and microscale fluctuations in the ejection gas stream of the nozzle directly contribute to thrust noise. According to the theory of boundary layer reception and flow stability, fluid fluctuations originate from the boundary layer or the development of incoming flow disturbance waves, and disturbance waves start from the receptive mechanism of the boundary layer (Jiang and Li, 2017). Boundary layer susceptibility theory is currently used to study the transition process of flow mechanisms, especially the transition problem of turbulence (Fig. 7) (Picella et al., 2019). Boundary bulge structures, vibrations, and pulsating excitation are all external disturbances to boundary layer susceptibility problems (Dietz, 1999).
The heat transfer on the nozzle wall and the micro-protrusion of the rough wall create the initial disturbance of flow through the boundary layer receptive mechanism for the micro-Newton scale cold gas thruster. Linear or nonlinear growth occurs during the flow process of the microfluidic channel and eventually develops into flow fluctuations that produce thrust noise. Fig. 8 shows the mechanism analysis of cross-basin flow fluctuation and thrust noise in the micro nozzle based on the theory of boundary layer sensitivity (Guo et al., 2021) and flow stability (Dou, 2022). At a macro level, that is what generates thrust noise.
In summary, the cross-basin flow in the micro nozzle is subject to the combination of the rarefaction effect, wall effect, wall roughness, and fluid-solid heat transfer. The flow fluctuation due to boundary layer sensitivity and flow stability problems directly determines the thrust noise. The inlet flow of the micro-Newton scale cold gas thruster shows the characteristics of cross-basin in the spatial environment. Moreover, the research on the cross-basin flow mechanism in the micro nozzle considers complex influencing factors. Especially the mechanism of thrust noise needs to be investigated further because of different fluid morphologies of the incoming flow. Thrust noise is generated not only from cross-basin airflow fluctuation but also from the control methods, the instability of closed-loop regulation measurement feedback, and the instability of the actuator itself. These components are covered in Sections 4 and 5.
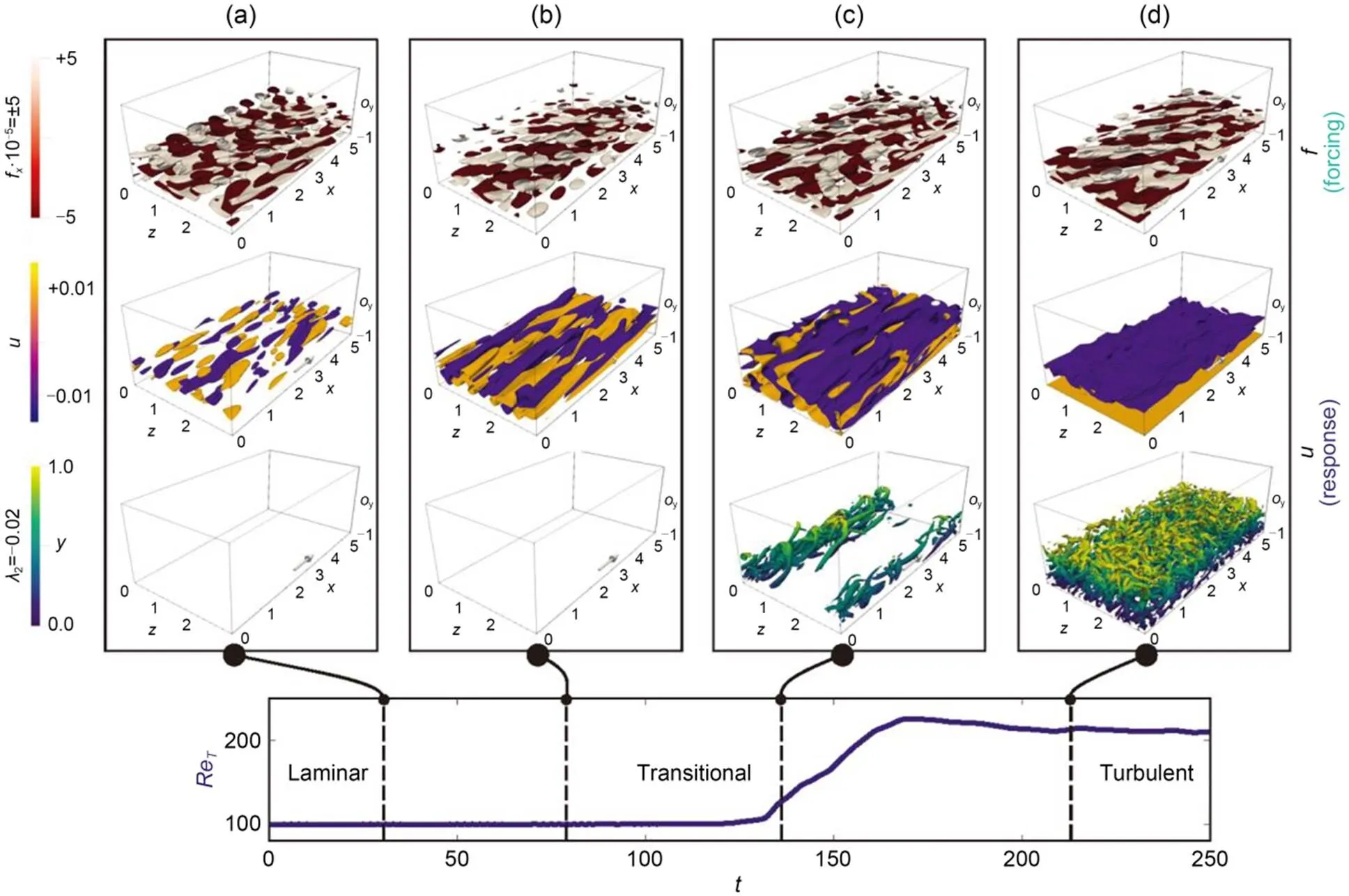
Fig. 7 Flow velocity of boundary layer and evolution of inverse vortex under boundary disturbance force. Reprinted from (Picella et al., 2019), Copyright 2019, with permission from Elsevier. fxis the streamwise component of the forcing, u is the streamwise velocity perturbation, λ2 is the λ2 criterion, and Reτ is the friction Reynolds number
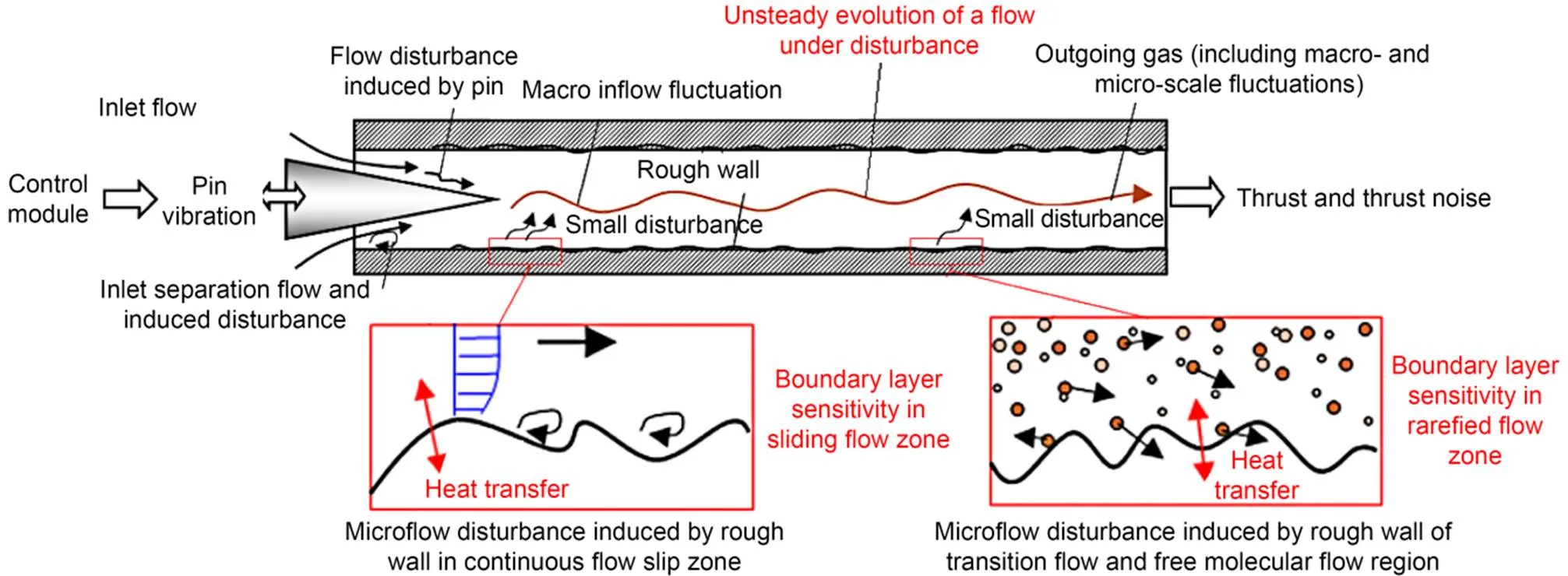
Fig. 8 Mechanism of cross-basin flow fluctuation and thrust noise in a micro nozzle
4 Control problem of MVTC
The MVTC technology applied to drag-free control can accurately regulate the cross-basin fluid through closed-loop control. This method can achieve the continuous variable thrust output of the submicro-Newton scale. In the spatial environment, the rapid and complex changes of various physical conditions in the cross-basin flow directly affect the high-precision thrust control output. Therefore, this section first presents the current state of research on the control method of MVTC and then describes its application in achieving low-thrust noise on "drag-free" satellite platforms.
4.1 Status of MVTC
So far, MVTC methods have mainly been based on proportional integral derivative (PID) control and have evolved from open-loop PID control to closed-loop PID control. Segismundo and Daniel (1975) of Stanford University and Saccoccia and Berry (2000) of ESA used open-loop pulse and open-loop PID control methods in the preliminary exploration of variable thrust control. They realized thrust control on the scale of a milli-micro-Newton. However, the open-loop regulation scheme lacks real-time feedback. This results in a system that is not sufficiently resilient in complex environments and does not allow for further improvements in regulation accuracy (Zhou et al., 2022).
Furthermore, this weakness can also cause system oscillations. To achieve regulatory stability, Haines (2000) studied the simulation method of PID closed-loop control. This research paves the way for applying closed-loop control of the micro-Newton scale cold gas propulsion system. In addition, some researchers have discussed the feasibility of using genetic and optimization algorithms to control thrust output (Ortega and Giron-Sierra, 1998; Lloyd-Davies et al., 2000; Wang et al., 2014). Wang et al. (2014) studied the MVTC based on fuzzy PID control (Fig. 9a), but there are still problems with control hysteresis and instability. Matticari et al. (2006) designed a closed-loop PID control scheme based on a piezoelectric driver with flow feedback (Fig. 9b). The scheme forms an optimized system architecture for minimal thrust regulation that is more mature at this stage. It has the advantage of achieving high accuracy and low noise control. The scheme uses pre-set PID control parameters to regulate the voltage of a high-precision piezoelectric actuator based on the feedback signal from the flow controller. The scheme can achieve a continuous output of 1–500 μN. The feasibility of fluid control for minimal thrusts was verified under laboratory conditions. However, thrust noise evaluation has yet to be carried out.
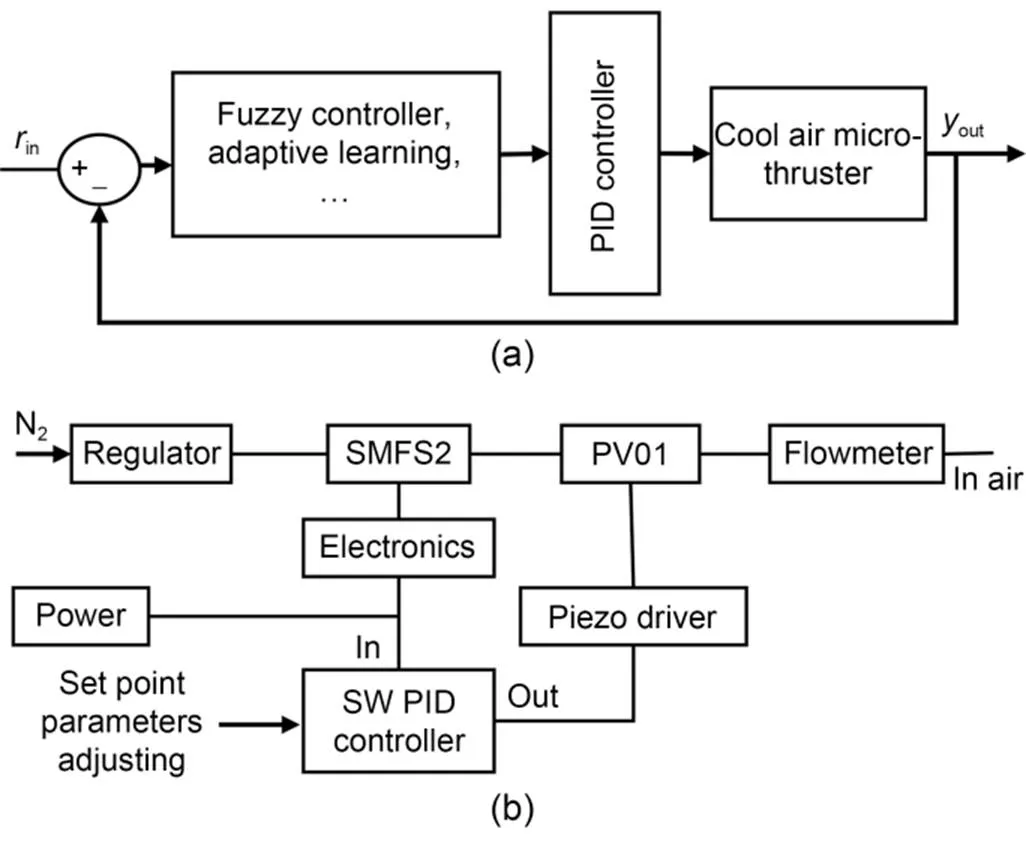
Fig. 9 Example of control methods in MVTC: (a) block diagram of variable universe fuzzy PID controller, where rin is the input of system and yout is the output of system; (b) schematic diagram of piezoelectric PID closed-loop control, where N2 is nitrogen flow, SMFS is silicon mass flow sensor, PV is proportional valve, and SW PID is square waveform PID
4.2 MVTC of low-thrust noise in space drag-free task
In order to achieve low-thrust noise control for the space drag-free task, Liénart and Pfaab (2013) studied the optimization of a PID-based control system. They added noise filtering processing as well as drive and measurement cooperative control algorithms. This improved method reduced the thrust noise. Later, Marie et al. (2019) proposed a piezoelectric driver method based on the PID closed-loop control approach with a high-precision flow sensor as feedback (Fig. 10). This method achieved continuous thrust adjustment in the range of 0.1–1000 μN, with a thrust resolution of 0.1 μN. This result satisfied the project requirements and has already been applied to the Gaia and LISA Pathfinder satellites. However, the on-orbit experimental results show that this method still has problems, such as excessive thrust noise spikes (2 μN/Hz1/2) and excessive noise in the low-frequency domain. These are due to the drift of flow feedback and piezoelectric nonlinearity. Until now, the technology can only partly satisfy the required indicators of the next-generation LISA satellite platforms.
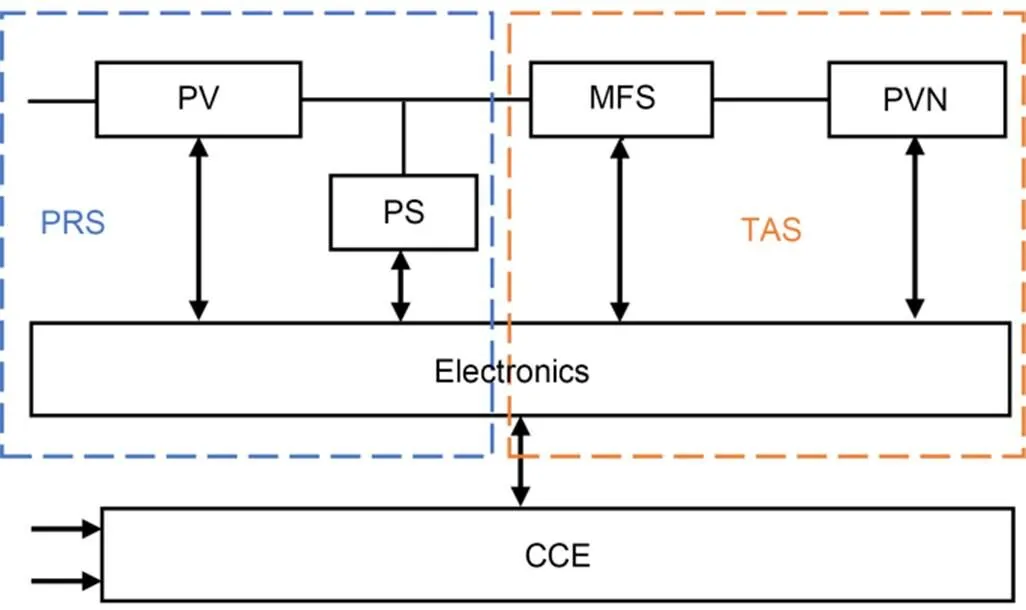
Fig. 10 Schematic diagram of piezoelectric driver method. PS: pressure sensor/transduce; MFS: mass flow sensor; PVN: proportional valve with nozzle; PRS: pressure regulation stage; TAS: thrust actuation stage; CCE: conditioning and control electronics
In summary, although the PID control method for flow control has been explored in various engineering situations (Cho and Song, 2004; Chen et al., 2009; Bolea et al., 2014), its control accuracy and noise processing ability can only partially satisfy the MVTC system. The existing MVTC system mainly adopts the PID control mode (Table 1), which can achieve 0.1-μN high-resolution control, and the thrust noise (in the frequency domain above 30 mHz) can be well controlled in a lower range. However, due to the prominent cross-basin nonlinear characteristics of the fluid flow in the micro nozzle and the complex fluid morphological transformation, the linear PID control method cannot adapt to the high-precision control requirements of minimal thrust. In particular, the control level of thrust noise cannot meet the application requirements. It is necessary to investigate the cross-basin microfluidic control approach adapted to the nonlinearity of piezoelectric execution and the uncertainty of flow feedback drift. By addressing these two challenges, it is believed possible to realize higher resolution, broader thrust range, and lower noise variable thrust regulation.
5 System instability and the coupled problem of MVTC
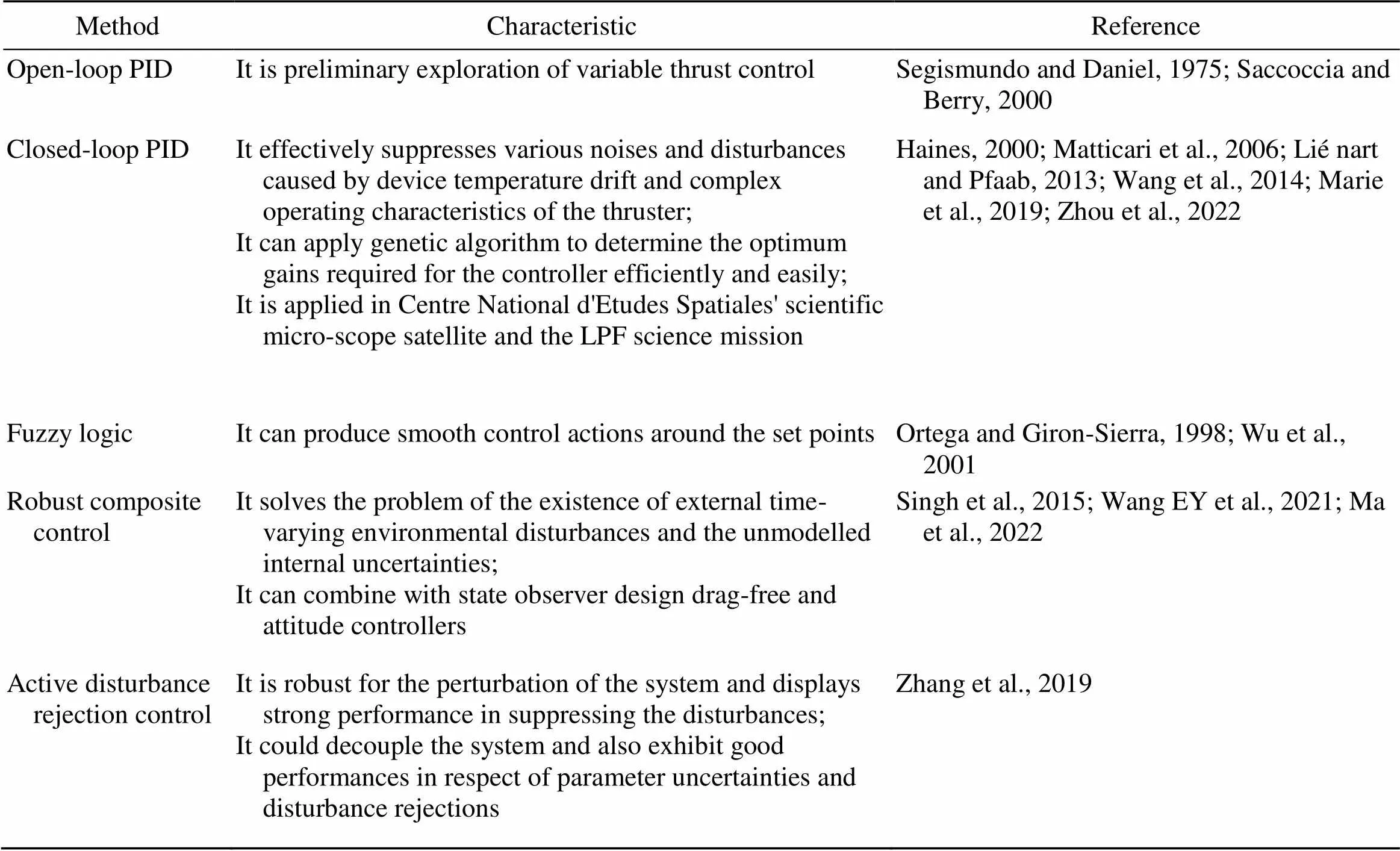
Table 1 Example of control methods in MVTC
In Section 4, the control method of MVTC and its research status in achieving minimal thrust and low noise control are studied. As can be seen from the previous section, thrust noise originates from more than flow fluctuations in the micro nozzle and the control method of the MVTC. Thrust noise also comes from instabilities in the MVTC, including instabilities in the flow measurement feedback and instabilities in the drive actuation. Therefore, in this section, based on the key issue of thrust noise, the studies of thrust noise from the instability of the piezoelectric actuator and the instability in the closed-loop feedback of the flow measurement are analyzed separately. Then the coupling of these two instabilities with the cross-basin flow is further studied.
5.1 Instability of drive actuator: piezoelectric precision driver
ESA has carried out micro-Newton scale thrust control using an annular stacked piezoceramic driver on Gaia, LISA Pathfinder, and other satellites (Li Y et al., 2019) and completed the application of on-orbit variable thrust. However, the hysteresis, creep, and sudden changes in the external load force of piezoelectric driver components significantly affect the accuracy and stability of fluid control. For nonlinear characteristics, such as hysteresis and creep of stacked piezoelectric ceramics, the typical treatment method is feed-forward control to eliminate instability. Especially when thrust is continuously regulated with a high resolution of 0.1 μN, precise driving significantly impacts the noise. Ge and Jouaneh (1997) were the first to apply the generalized Preisach model to the hysteresis analysis of compensated stacked piezoelectric ceramics. They realized high-precision tracking of arbitrary non-periodic signals. Krejci and Kuhnen (2001) used the proportional integral model to compensate for the hysteresis of stacked piezoelectric ceramics and achieved good control results by inverse feed-forward control. Galinaitis and Rogers (1998) used the proportional derivative inverse model to study the nonlinear characteristics of stacked piezoelectric ceramics, which reduced the error of the entire control system to 1%. Wen (2009) applied the Preisach model as a composite control method, composed of a feed-forward model for control and fuzzy adaptive PID, to stacked piezoelectric ceramics, which improved the stability of the system. Wang et al. (2011), Wang and Zhu (2011), and Zhu and Wang (2012) systematically studied the hysteresis characteristics, parameter identification, and linearization control methods of piezoelectric stack actuators and their systems (Fig. 11). They established the symmetric/asymmetric Bouc-Wen mathematical models as well as the corresponding parameter identification methods, in order to accurately describe the hysteresis phenomenon of piezoelectric ceramic stack actuators.
In the piezoelectric driver of the micro-Newton scale cold gas thruster, the creep will intensify under the action of the compression force, and its predictable deterioration will occur. The temperature change and the other complex space environment factors will also cause the piezoelectric ceramics' mechanical merit and piezoelectric constant to deteriorate sharply. Moreover, the convective heat transfer caused by gas flow leads to variations in the temperature domain of the piezoelectric actuator. This variation can further increase the unpredictability of the displacement characteristics. Therefore, under multi-physics action in the space environment, the influence of the controlled instability includes creep characteristics, temperature drift characteristics, and mechanical properties of piezoelectric actuators (Wang et al., 2022). Thus, the analysis of controlled instability and its control methods needs further study.
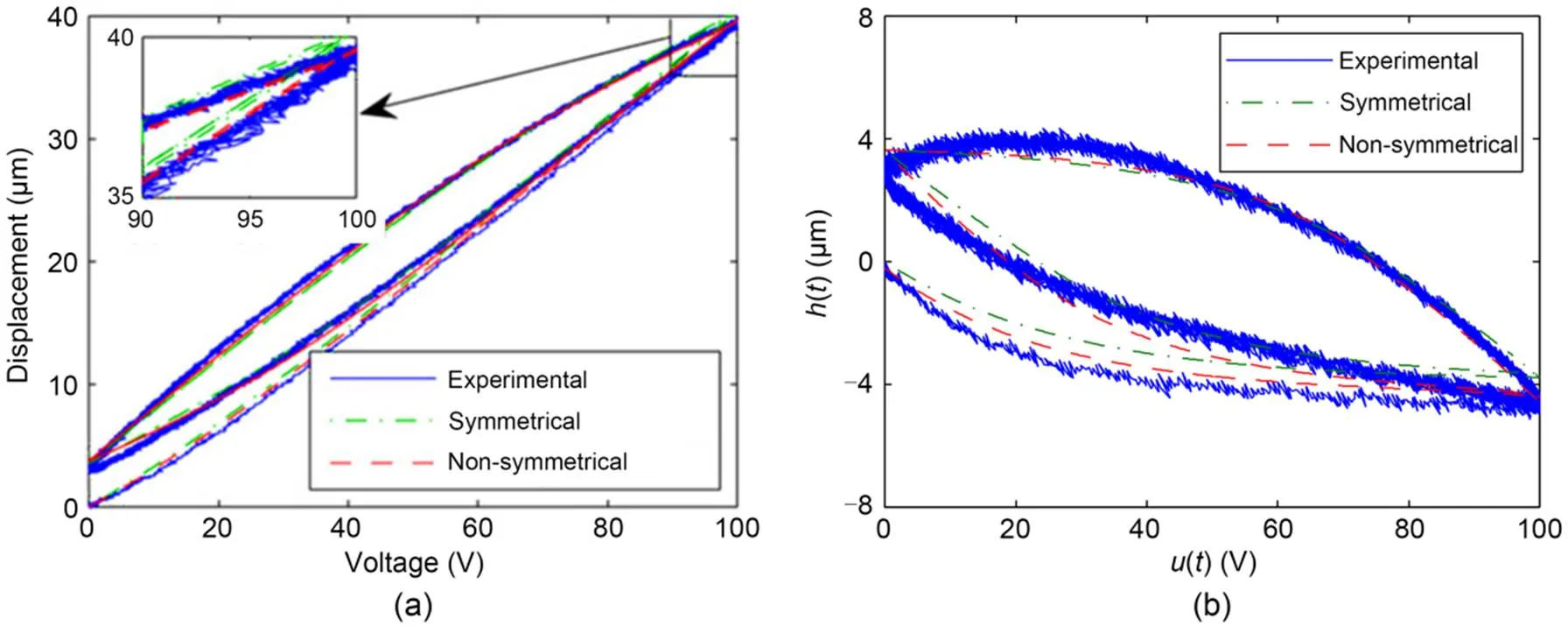
Fig. 11 Hysteresis simulation and linearization of piezoelectric ceramic actuators based on Bouc-Wen hysteresis operators: (a) hysteretic curves; (b) hysteresis component. Reprinted from (Zhu and Wang, 2012), Copyright 2012, with permission from Elsevier. h(t) is the hysteretic component, and u(t) is the voltage applied to the piezoelectric ceramic actuator
5.2 Instability of measure feedback: flow measurement feedback
In the minimal thrust continuous variable thrust system, the stability and response time of fluid measurement directly affect the thrust stability and noise level. The thermal flow measurement technology is usually based on the MEMS process, using the principle of thermal balance. The flow measurement is carried out by heat or temperature difference, which has the advantages of a wide range ratio, fast response, small size, and low power consumption. It maintains good performance under a shallow flow rate. Noci et al. (2007) developed an MEMS thermal flow sensor for the MVTC system of Gaia, LISA, and Darwin drag-free spacecraft, which supported the MVTC applied during orbit. However, the on-orbit data showed that the temperature drift caused a significant measurement error, resulting in unstable thrust control (Matticari et al., 2006, 2011). In the usual case of continuous flow, the influence of pressure measurement can be ignored. However, the influences of MVTC cannot be dismissed because the flow measurement feature size is in the micron range and the gas thinning effect is prominent (Bruschi et al., 2006). The structural form, structural temperature distribution, and microstructure characteristics of the fluid channel are significantly affected (Dijkstra et al., 2009; Xu W et al., 2017). Therefore, studying the influence of complex factors and stable measurement methods is necessary.
5.3 Closed-loop control coupled with cross-basin flow
Drive actuator and measurement feedback are two key items in closed-loop control that need to be considered when establishing control systems and methods. In real engineering, the three items: drive actuator, measurement feedback, and cross-basin flow environment, are coupled together, which means the instability and noise challenge is a multiple-coupled problem. To understand the problem, this subsection first introduces the coupled noise and then analyzes the current status of a coupled noise mechanism to explore the thrust noise characteristics for the realization of active control.
5.3.1Analysis of control and couple
The thrust noise problem in the process of MVTC involves the coupling of complex power conversion, electromagnetic conversion, and valve-core movement with the cross-basin flow. Currently, the research on thrust noise is mainly based on experiments, which are limited by test technology. The influencing factors and mechanisms of thrust noise need to be studied in-depth. ESA carried out the thrust noise test measurement work of the LISA Pathfinder MVTC system and showed that both piezoelectric driver and measurement instability can cause thruster noise (Nicolini et al., 2009; Jarrige et al., 2014). Ziemer et al. (2010) carried out active thrust noise control on the ST7-DRS system and found that active control can improve the thrust noise level at a higher level. At higher control frequencies, microfluidic piezoelectric drivers and flow measurement feedback add background noise, which is further complicated in spatially complex environments. The unsteady thermal boundary in the space environment, along with the non-equilibrium effect brought by the movement of the pin, as well as the measurement instability, will interfere with the flow and cause thrust noise in the MVTC system. Thus, research on the active control and the coupling effect of cross-basin flow is important. Therefore, the following account explores the influence of active control on thrust noise, and a quantitative relationship between active control and thrust noise is studied.
5.3.2Exploring the coupled noise mechanism
The thrust is traditionally measured by a double pendulum and other methods for obtaining thrust noise characteristics. However, MVTC is off the ideal measurement environment, and its environmental noise possibly affects the measurement result, which cannot meet the research needs. Moreover, theoretical methods, such as verifying thrust noise models and understanding thrust noise mechanisms, can provide only limited information (Jarrige et al., 2014). The practical observation of the flow field must be carried out by other means. Laser-induced fluorescence (LIF) is a non-contact optical diagnostic technique with high temporal and spatial resolution. It can realize the measurement of a variety of parameters and has a wide application and significant advantage in the study of the non-uniform flow field. Palmer and Hanson (1993) used nitric oxide (NO) planar laser-induced fluorescence (PLIF) to measure the temperature distribution at the hypersonic nozzle. They verified the numerical calculation model of hypersonic speed. Palma et al. (2003) used NO PLIF to observe the airflow instability in the shock wave wind tunnel experiment and finally mitigated the instability problem by modifying the nozzle design. Zhang et al. (2017) used LIF to measure the airflow velocity at the vent of the cathode arc heating wind tunnel and verified the design index of the wind tunnel. By measuring the plume at the outlet of the micro-Newton scale thruster with LIF technology, more detailed velocity, boundary layer, and temperature distribution information can be obtained. It provides richer data support for exploring the thrust noise mechanism and establishing the thrust noise mathematical model.
The MVTC is achieved by a piezoelectric precision drive and flow closed-loop feedback due to the tiny thrust. Piezoelectric hysteresis, oscillation of the piezoelectric driver mechanism, and uncertainty of the flow measurement feedback will cause the instability of the minimal thrust closed-loop control. The coupling of the actuator, flow feedback, and cross-basin flow will also cause thrust noise. The acquisition of accurate thrust noise characteristics will help to improve the effectiveness of active noise control and mitigate the effects of cross-basin coupling noise.
6 Summary and perspectives
6.1 Summary
Variable thrust control technology involves multi-disciplinary intersections such as cross-basin flow, electromechanical effects, and control. Thrust noise is the key challenge of MVTC for drag-free flight. To realize minimal thrust, the coupling mechanism and active control method of cross-basin noise are core scientific issues for reducing the noise. Based on this, this paper provides an overview of the following four main areas.
(1) Core issue: The basic concepts of MVTC technology and thrust noise are introduced generally, as well as some practical applications on drag-free satellite platforms. The on-orbit experiments indicate that the current thrust noise still cannot meet the requirements. The key noise factors are the cross-basin flow problem, the control problem, and the system instability and multiple-coupled problem.
(2) Cross-basin: The cross-basin rarefied gas flow problem is one of the main issues, and covers the continuum region, slip region, transition region, and free molecular region. The thrust noise caused by gas flow fluctuation is analyzed. The cross-basin flow is mainly due to the coupling of the rarefaction effect, wall effect, wall roughness, and fluid-solid heat transfer. The thrust noise will generate from the flow fluctuation's boundary layer sensitivity and flow stability problems.
(3) Control: The control methods of MVTC technology and its application on "drag-free" satellite platforms are reviewed. Through the analysis, the deficiency of the current control methods means that the control accuracy and noise processing ability can only partially satisfy the MVTC system. The commonly used PID solution falls short of the target. To satisfy the indicators of control under a cross-basin environment, more research adapted to the nonlinearity of piezoelectric execution and the uncertainty of flow feedback drift is required.
(4) Instability and couple: Inside the system, piezoelectric execution and the measurement feedback itself show an instability where the noise strongly increases. However, in real engineering, the three items: the drive actuator, measurement feedback, and the cross-basin flow environment, are coupled together, and the noise is seen as a multiple-coupled problem. The observance of thrust noise is helpful for exploring the mechanism and finally realizing active noise-reducing control.
6.2 Perspectives
Based on existing research, there is still a lack of in-depth consideration of "complex cross-basin flow," "space working environments," "thrust noise mechanism," and "active suppressing methods," which could bring a further improvement of the noise problem in the future. In totality, the following discussions need to be further explored:
(1) In the study of trans-basin flow mechanisms, the existing microscale flow research has progressed in respect of the cross-basin flow mechanism. However, the control of minimal thrust still needs the advanced mechanism of cross-basin flow instability in micro nozzles and the comprehensive influence of multiple physical factors (Galindo-Rosales et al., 2014). Some researchers have used the NS/DSMC method to analyze the flow in the micro nozzle (Sun et al., 2008; Li et al., 2022). However, there needs to be more consideration of the heat transfer factors in the space environment and of the lack of comprehensive impact analysis of the actual rough wall in the micro nozzle (Cai et al., 2015a, 2015b, 2017), as well as the microscale effect and wall effect. More research still needs to be conducted on the formation mechanism of the initial disturbances affecting flow fluctuations and thrust noise. An accurate prediction model for the full range of thrust of the micro-Newton scale thruster has yet to be established.
(2) In the study of control methods for MVTC, linear control theory based on accurate models cannot fully consider uncertain influences. It requires research into control methods oriented towards cross-basin fluid nonlinearity and complex coupling laws of regulation and flow. To study variable thrust regulation at the micro-Newton level, researchers are currently adopting linear PID control, which cannot satisfy the demand for thrust noise suppression (Ma et al., 2022). There is a lack of basic research on the mechanism of thrust instability generated by the coupling of fluid regulation links such as piezoelectric driver, flow measurement feedback, and cross-basin flow. Control methods that adequately consider complex influences on the nonlinearity of microfluidic flow still need to be established. The above reasons lead to the insufficient adaptability and regulation stability of cross-basin fluid control for minimal thrusts.
(3) In the study of instability in closed-loop control, the nonlinearity and uncertainty of the implementation and feedback of minimal thrust closed-loop control have an important impact on thrust noise suppression. Studying the minimal thrust noise suppression method based on the piezoelectric driver and flow feedback closed-loop control is necessary. Much research has been carried out on variable thrust regulation of piezoelectric hysteresis characteristics, as well as on control methods and the basic methods of flow measurement. However, stability control of piezoelectric creep for long-term service is lacking. A stability model for flow measurement considering spatial multi-physics factors is needed. Moreover, research should be carried out into low-frequency domain thrust noise suppression methods considering the piezoelectric driver and flow measurement. There is also a need to achieve noise suppression in the closed-loop control itself and noise transfer suppression. Moreover, an advanced noise observing method, such as LIF, will be able to bring a better understanding of the coupling mechanism. A clear coupling mechanism will help to establish the noise coupling model with consideration of cross-basin flow, active control, system instability, environment, etc. Based on this noise model, better nonlinear control algorithms might be achieved. Examples are mode-predictive control, noise active suppression control, feedforward active disturbance rejection controller (Wang et al., 2020), and noise-description flatness feedback control (Singh et al., 2015; Wang EY et al., 2021).
Future research could be undertaken in three areas: cross-basin flow mechanisms, control methods for MVTC, and measurement feedback and drive actuation for closed-loop control of MVTC to achieve suppression of thrust noise generated in MVTC. Further research, aiming at precision measurements (Li et al., 2021), noise couple mechanism, high-precision control methods, precision devices, and fluid thermodynamics, will support MVTC in the next generation of high-precision drag-free spacecraft.
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Nos. 52105070 and U21B2074).
Author contributions
Changyi XU: conceptualization, writing-original draft; Wenya LI: revision and organization of the manuscript, technical analysis, and comparison; Yong LI and Xuhui LIU: collecting information and advice; Chao ZHANG: revision of the final version and supervision.
Conflict of interest
Changyi XU, Wenya LI, Xuhui LIU, Yong LI, and Chao ZHANG declare that they have no conflict of interest.
Alexeenko AA, Fedosov DA, Gimelshein SF, et al., 2006. Transient heat transfer and gas flow in a MEMS-based thruster., 15(1):181-194. https://doi.org/10.1109/Jmems.2005.859203
Anderson G, Anderson J, Anderson M, et al., 2018. Experimental results from the ST7 mission on LISA Pathfinder., 98(10):102005. https://doi.org/10.1103/PhysRevD.98.102005
Anzalchi J, Harverson M, 2007. Generic flexible payload technology for enhancing in-orbit satellite payload flexibility. Proceedings of the 25th AIAA International Communications Satellite Systems Conference. https://doi.org/10.2514/6.2007-3184
Armano M, Audley H, Baird J, et al., 2018. Beyond the required LISA free-fall performance: new LISA Pathfinder results down to 20 μHz., 120(6):061101. https://doi.org/10.1103/PhysRevLett.120.061101
Armano M, Audley H, Baird J, et al., 2019. LISA Pathfinder platform stability and drag-free performance., 99(8):082001. https://doi.org/10.1103/PhysRevD.99.082001
Bacchetta A, Colangelo L, Canuto E, et al., 2017. From GOCE to NGGM: automatic control breakthroughs for European future gravity missions., 50(1):6428-6433. https://doi.org/10.1016/j.ifacol.2017.08.1030
Bar-Kana R, 1994. Limits on direct detection of gravitational waves., 50(2):1157-1160. https://doi.org/10.1103/physrevd.50.1157
Bolea Y, Puig V, Blesa J, 2014. Gain-scheduled smith predictor PID-based LPV controller for open-flow canal control., 22(2):468-477. https://doi.org/10.1109/Tcst.2013.2257776
Bortoluzzi D, Vignotto D, Zambotti A, et al., 2021. In-flight testing of the injection of the LISA pathfinder test mass into a geodesic., 67(1):504-520. https://doi.org/10.1016/j.asr.2020.09.009
Bruschi P, Piotto M, Barillaro G, 2006. Effects of gas type on the sensitivity and transition pressure of integrated thermal flow sensors., 132(1):182-187. https://doi.org/10.1016/j.sna.2006.03.021
Burderi L, Sanna A, Di Salvo T, et al., 2021.: hunting for atoms of space and time hidden in the wrinkle of space-time., 51(3):1255-1297. https://doi.org/10.1007/s10686-021-09745-5
Cai YK, Liu ZQ, Song QH, et al., 2015a. Fluid mechanics of internal flow with friction and cutting strategies for micronozzles., 100:41-49. https://doi.org/10.1016/j.ijmecsci.2015.06.011
Cai YK, Liu ZQ, Shi ZY, et al., 2015b. Optimization of machining parameters for micro-machining nozzle based on characteristics of surface roughness., 80(5-8):1403-1410. https://doi.org/10.1007/s00170-015-7115-1
Cai YK, Liu ZQ, Shi ZY, et al., 2016. Influence of machined surface roughness on thrust performance of micro-nozzle manufactured by micro-milling., 77:295-305. https://doi.org/10.1016/j.expthermflusci.2016.05.004
Cai YK, Liu ZQ, Shi ZY, 2017. Effects of dimensional size and surface roughness on service performance for a micro Laval nozzle., 27(5):055001. https://doi.org/10.1088/1361-6439/aa6552
Canuto E, 2008. Drag-free and attitude control for the GOCE satellite., 44(7):1766-1780. https://doi.org/10.1016/j.automatica.2007.11.023
Canuto E, Massotti L, 2009. All-propulsion design of the drag-free and attitude control of the European satellite GOCE., 64(2-3):325-344. https://doi.org/10.1016/j.actaastro.2008.07.017
Cesare S, Aguirre M, Allasio A, et al., 2010. The measurement of Earth’s gravity field after the GOCE mission., 67(7-8):702-712. https://doi.org/10.1016/j.actaastro.2010.06.021
Cesare S, Allasio A, Anselmi A, et al., 2016. The European way to gravimetry: from GOCE to NGGM., 57(4):1047-1064. https://doi.org/10.1016/j.asr.2015.12.012
Chen SH, He HM, Li XF, et al., 2009. Application of fuzzy PID controller with self-adaptive algorithm and non-uniform grid scheduling to WFGD., 42(9):20-25. https://doi.org/10.3182/20090705-4-sf-2005.00006
Cho JW, Song C, 2004. Stabilized max-min flow control using PID and PII2controllers. Proceedings of the IEEE Global Telecommunications Conference, p.1411-1417. https://doi.org/10.1109/GLOCOM.2004.1378216
Christophe B, Boulanger D, Foulon B, et al., 2015. A new generation of ultra-sensitive electrostatic accelerometers for GRACE Follow-on and towards the next generation gravity missions., 117:1-7. https://doi.org/10.1016/j.actaastro.2015.06.021
Collingwood CM, Gabriel SB, Corbett MH, et al., 2009. The MiDGIT thruster: development of a multi-mode thruster. Proceedings of the 31st International Electric Propulsion Conference, p.2-13.
Cui K, Liu H, Jiang WJ, et al., 2018. Effects of cusped field thruster on the performance of drag-free control system., 144:193-200. https://doi.org/10.1016/j.actaastro.2017.12.032
Cui K, Liu H, Jiang WJ, et al., 2020. Effects of thrust noise and measurement noise on drag-free and attitude control system., 32(2):189-202. https://doi.org/10.1007/s12217-019-09760-4
Cui K, Liu H, Jiang WJ, et al., 2021. Thrust noise cause analysis and suppression of a cusped field thruster., 179:322-329. https://doi.org/10.1016/j.actaastro.2020.11.023
DeBra DB, Conklin JW, 2011. Measurement of drag and its cancellation., 28(9):094015. https://doi.org/10.1088/0264-9381/28/9/094015
Dietz AJ, 1999. Local boundary-layer receptivity to a convected free-stream disturbance., 378:291-317. https://doi.org/10.1017/S0022112098003243
Dijkstra M, Lammerink TSJ, de Boer MJ, et al., 2009. Ambient temperature-gradient compensated low-drift thermopile flow sensor. Proceedings of the IEEE 22nd International Conference on Micro Electro Mechanical Systems, p.479-482. https://doi.org/10.1109/MEMSYS.2009.4805423
Ding YT, Yao ZH, He F, 2004. Gas flow characteristics in micro-nozzle., 21(3):190-195 (in Chinese).
Dittus H, Lämmerzahl C, Turyshev SG, 2008. Lasers, Clocks and Drag-Free Control: Exploration of Relativistic Gravity in Space. Springer, Berlin Heidelberg, Germany. https://doi.org/10.1007/978-3-540-34377-6
Dou HS, 2022. Stability and transition of boundary layer flow.: Dou HS (Ed.), Origin of Turbulence. Springer, Singapore, p.159-206. https://doi.org/10.1007/978-981-19-0087-7_6
Galinaitis WS, Rogers RC, 1998. Control of a hysteretic actuator using inverse hysteresis compensation. Proceedings of SPIE 3323, Smart Structures and Materials 1998: Mathematics and Control in Smart Structures, p.267-277. https://doi.org/10.1117/12.316308
Galindo-Rosales FJ, Campo-Deaño L, Sousa PC, et al., 2014. Viscoelastic instabilities in micro-scale flows., 59:128-139. https://doi.org/10.1016/j.expthermflusci.2014.03.004
Gao Y, Ma YF, Liu JT, 2014. A review of the vaporizing liquid microthruster technology. Proceedings of the 6th International Symposium on Fluid Machinery and Fluid Engineering, p.93-96. https://doi.org/10.1049/cp.2014.1220
Ge P, Jouaneh M, 1997. Generalized Preisach model for hysteresis nonlinearity of piezoceramic actuators., 20(2):99-111. https://doi.org/10.1016/S0141-6359(97)00014-7
Giacaglia GEO, Marcondes AO, 2007. Atmospheric models for artificial satellites orbit determination–a review., 13(1):17-31.
Grm A, Grönland TA, Rodič T, 2011. Numerical analysis of a miniaturised cold gas thruster for micro- and nano-satellites., 28(2):184-195. https://doi.org/10.1108/02644401111109222
Guo PX, Gao ZX, Jiang CW, et al., 2021. Sensitivity analysis on supersonic-boundary-layer stability subject to perturbation of flow parameters., 33(8):084111. https://doi.org/10.1063/5.0059694
Haines R, 2000. Development of a drag-free control system. Proceedings of the 14th Annual AIAA/USU Conference on Small Satellites.
Hameed AH, Kafafy R, Asrar W, et al., 2013. Two-dimensional flow properties of micronozzle under varied isothermal wall conditions., 5(4):174-180. https://doi.org/10.1504/ijesms.2013.056692
He ZQ, Jiang ZZ, Zhang HW, et al., 2021. Analytical method of nonlinear coupled constitutive relations for rarefied non-equilibrium flows., 34(2):136-153. https://doi.org/10.1016/j.cja.2020.06.023
Hey FG, 2018. Micro Newton Thruster Development. Springer, Wiesbaden, Germany. https://doi.org/10.1007/978-3-658-21209-4
Iorio L, 2019. Measuring general relativistic dragging effects in the Earth’s gravitational field with ELXIS: a proposal., 36(3):035002. https://doi.org/10.1088/1361-6382/aaf6d4
Jarrige J, Thobois P, Blanchard C, et al., 2014. Thrust measurements of the Gaia mission flight-model cold gas thrusters., 30(4):934-943. https://doi.org/10.2514/1.B35091
Ji Y, Yuan K, Chung JN, 2006. Numerical simulation of wall roughness on gaseous flow and heat transfer in a microchannel., 49(7-8):1329-1339. https://doi.org/10.1016/j.ijheatmasstransfer.2005.10.011
Jiang XY, Li CB, 2017. Review of research on the receptivity of hypersonic boundary layer., 31(2):1-11 (in Chinese). https://doi.org/10.11729/syltlx20160129
Khezerloo M, Djenidi L, Tardu S, 2021. Combined effect of roughness and suction on heat transfer in a laminar channel flow., 126:105377. https://doi.org/10.1016/j.icheatmasstransfer.2021.105377
Korol V, Toonen S, Klein A, et al., 2020. Populations of double white dwarfs in milky way satellites and their detectability with LISA., 638:A153. https://doi.org/10.1051/0004-6361/202037764
Krejci P, Kuhnen K, 2001. Inverse control of systems with hysteresis and creep., 148(3):185-192. https://doi.org/10.1049/ip-cta:20010375
la Torre F, Kenjereš S, Moerel JL, et al., 2011. Hybrid simulations of rarefied supersonic gas flows in micro-nozzles., 49(1):312-322. https://doi.org/10.1016/j.compfluid.2011.06.008
Lange BO, 1964. The Control and Use of Drag-Free Satellites. PhD Thesis, Stanford University, Stanford, USA.
Le NTP, Roohi E, Tran TN, 2019. Comprehensive assessment of newly-developed slip-jump boundary conditions in high-speed rarefied gas flow simulations., 91:656-668. https://doi.org/10.1016/j.ast.2019.07.005
Li L, Yuan L, Wang L, et al., 2021. Recent advances in precision measurement & pointing control of spacecraft., 34(10):191-209. https://doi.org/10.1016/j.cja.2020.11.018
Li WJ, Cheng DY, Liu XG, et al., 2019. On-orbit service (OOS) of spacecraft: a review of engineering developments., 108:32-120. https://doi.org/10.1016/j.paerosci.2019.01.004
Li XJ, Yuan JY, Ren X, et al., 2022. Simulation applicability verification of various slip models in micro-nozzle., 192:68-76. https://doi.org/10.1016/j.actaastro.2021.11.021
Li Y, Liu XH, Wang XD, et al., 2019. Review and prospect on the large-range thrust throttling technology with extremely small thrust., 45(6):1-12 (in Chinese). https://doi.org/10.3969/j.issn.1674-1579.2019.06.001
Liénart T, Pfaab K, 2013. Cold gas propulsion system for CNES microscope spacecraft: presentation of the project and development and verification plan. Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference. https://doi.org/10.2514/6.2013-3759
Liu H, Niu X, Zeng M, et al., 2022. Review of micro propulsion technology for space gravitational waves detection., 193:496-510. https://doi.org/10.1016/j.actaastro.2022.01.043
Liu XH, Li D, Fu XJ, et al., 2023. Modeling of rarefied gas flows inside a micro-nozzle based on the DSMC method coupled with a modified gas-surface interaction model., 16(1):505. https://doi.org/10.3390/en16010505
Liu ZC, Fan WJ, 2010. Velocity distribution and scaling properties of wall bounded flow., 11(7):505-510. https://doi.org/10.1631/jzus.A1000044
Lloyd-Davies EJ, Ponman TJ, Cannon DB, 2000. The entropy and energy of intergalactic gas in galaxy clusters., 315(4):689-702. https://doi.org/10.1046/j.1365-8711.2000.03380.x
Louisos WF, Hitt DL, 2007. Heat transfer & viscous effects in 2D & 3D supersonic micro-nozzle flows. Proceedings of the 37th AIAA Fluid Dynamics Conference and Exhibit. https://doi.org/10.2514/6.2007-3987
Luo J, Chen LS, Duan HZ, et al., 2016. TianQin: a space-borne gravitational wave detector., 33(3):035010. https://doi.org/10.1088/0264-9381/33/3/035010
Luo J, Bai YZ, Cai L, et al., 2020. The first round result from the TianQin-1 satellite., 37(18):185013. https://doi.org/10.1088/1361-6382/aba66a
Luo ZR, Guo ZK, Jin G, et al., 2020. A brief analysis to Taiji: science and technology., 16:102918. https://doi.org/10.1016/j.rinp.2019.102918
Ma HJ, Zheng JH, Han P, et al., 2022. Robust composite control design of drag-free satellite with Kalman filter-based extended state observer for disturbance reduction., 70(10):3034-3050. https://doi.org/10.1016/j.asr.2022.07.048
Mao SP, Wu SF, 2023. ESO based adaptive fault-tolerant control for drag-free satellite. Proceedings of the International Conference on Guidance, Navigation and Control, p.6228-6239. https://doi.org/10.1007/978-981-19-6613-2_601
Marie J, Cordero F, Milligan D, et al., 2019. In-orbit experience of the Gaia and LISA pathfinder cold gas micro-propulsion systems.: Pasquier H, Cruzen CA, Schmidhuber M, et al. (Eds.), Space Operations: Inspiring Humankind’s Future. Springer, Cham, Germany, p.551-574. https://doi.org/10.1007/978-3-030-11536-4_21
Matticari G, Noci G, Siciliano P, et al., 2006. Cold gas micro propulsion prototype for very fine spacecraft attitude/position control. Proceedings of the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. https://doi.org/10.2514/6.2006-4872
Matticari G, Materassi M, Noci G, et al., 2011. Use of a “wide dynamic range” electronic flow regulator to increase the flexibility and versatility of electric and cold gas small propulsion systems. Proceedings of the 32nd International Electric Propulsion Conference.
Moríñigo JA, Hermida-Quesada J, 2010. Solid–gas surface effect on the performance of a MEMS-class nozzle for micropropulsion., 162(1):61-71. https://doi.org/10.1016/j.sna.2010.06.006
Nguyen AN, Conklin JW, 2015. Three-axis drag-free control and drag force recovery of a single-thruster small satellite., 52(6):1640-1650. https://doi.org/10.2514/1.A33190
Nicolini D, Frigot PE, Musso F, et al., 2009. Direct thrust and thrust noise measurements on the LISA pathfinder field emission thruster. Proceedings of the 31st International Electric Propulsion Conference.
Niu X, Liu H, Cui K, et al., 2022. Multi-source information fusion for space gravitational waves detection thrust estimation on orbit., 200:539-548. https://doi.org/10.1016/j.actaastro.2022.08.030
Noci G, Matticari G, Siciliano P, et al., 2007. Advanced fluidic components for electric and cold gas propulsion applications: review of status of achievements at TAS-I Florence. Proceedings of the 30th International Electric Propulsion Conference.
Ortega G, Giron-Sierra JM, 1998. Geno-fuzzy control in autonomous servicing of a space station., 11(3):383-400. https://doi.org/10.1016/S0952-1976(98)00008-6
Palma PC, Danehy PM, Houwing AFP, 2003. Fluorescence imaging of rotational and vibrational temperature in shock-tunnel nozzle flow., 41(9):1722-1732. https://doi.org/10.2514/2.7290
Palmer JL, Hanson RK, 1993. Single-shot velocimetry using planar laser-induced fluorescence imaging of nitric oxide. Proceedings of the 29th Joint Propulsion Conference and Exhibit. https://doi.org/10.2514/6.1993-2020
Picella F, Bucci MA, Cherubini S, et al., 2019. A synthetic forcing to trigger laminar-turbulent transition in parallel wall bounded flows via receptivity., 393:92-116. https://doi.org/10.1016/j.jcp.2019.04.011
Pittet C, 2007. Accelero-stellar hybridization for microscope drag free mission., 40(7):271-276. https://doi.org/10.3182/20070625-5-fr-2916.00047
Rafi KMM, Deepu M, Rajesh G, 2019. Effect of heat transfer and geometry on micro-thruster performance., 146:106063. https://doi.org/10.1016/j.ijthermalsci.2019.106063
Ranjan R, Chou SK, Riaz F, et al., 2017. Cold gas micro propulsion development for satellite application., 143:754-761. https://doi.org/10.1016/j.egypro.2017.12.758
Ranjan R, Karthikeyan K, Riaz F, et al., 2018. Cold gas propulsion microthruster for feed gas utilization in micro satellites., 220:921-933. https://doi.org/10.1016/j.apenergy.2018.03.040
Renksizbulut M, Niazmand H, Tercan G, 2006. Slip-flow and heat transfer in rectangular microchannels with constant wall temperature., 45(9):870-881. https://doi.org/10.1016/j.ijthermalsci.2005.12.008
Robert A, Cipolla V, Prieur P, et al., 2022. MICROSCOPE satellite and its drag-free and attitude control system., 39(20):204003. https://doi.org/10.1088/1361-6382/ac09cd
Rosa P, Karayiannis TG, Collins MW, 2009. Single-phase heat transfer in microchannels: the importance of scaling effects., 29(17-18):3447-3468. https://doi.org/10.1016/j.applthermaleng.2009.05.015
Saccoccia G, Berry G, 2000. European electric propulsion activities and programmes., 47(2-9):193-203. https://doi.org/10.1016/S0094-5765(00)00059-X
Schleicher A, Ziegler T, Schubert R, et al., 2018. In-orbit performance of the LISA pathfinder drag-free and attitude control system., 10(4):471-485. https://doi.org/10.1007/s12567-018-0204-x
Sechi G, Buonocore M, Cometto F, et al., 2011. In-flight results from the drag-free and attitude control of GOCE satellite., 44(1):733-740. https://doi.org/10.3182/20110828-6-it-1002.02966
Segismundo SFC, Daniel BD, 1975. Mass center estimation of a drag-free satellite., 8(1): 264-271. https://doi.org/10.1016/S1474-6670(17)67478-0
Shams M, Khadem MH, Hossainpour S, 2009. Direct simulation of roughness effects on rarefied and compressible flow at slip flow regime., 36(1):88-95. https://doi.org/10.1016/j.icheatmasstransfer.2008.08.018
Singh S, D’Amico S, Pavone M, 2015. High-fidelity modeling and control system synthesis for a drag-free microsatellite. Proceedings of the International Symposium on Space Flight Dynamics.
Song PY, Sun LM, Kuang SY, et al., 2019. Micro-Newton electrospray thrusters for China’s space-borne gravitational wave detection mission (TianQin). Proceedings of the 36th International Electric Propulsion Conference.
Strugarek D, Sośnica K, Jäggi A, 2019. Characteristics of GOCE orbits based on satellite laser ranging., 63(1):417-431. https://doi.org/10.1016/j.asr.2018.08.033
Sukesan MK, Shine SR, 2021. Geometry effects on flow characteristics of micro-scale planar nozzles., 31(12):125001. https://doi.org/10.1088/1361-6439/ac2bac
Sun ZX, Li ZY, He YL, et al., 2008. Coupled FVM-DSMC simulation of micro-nozzle with unstructured-grid. Proceedings of the International Conference on Nanochannels, Microchannels, and Minichannels, p.1437-1444. https://doi.org/10.1115/ICNMM2008-62139
Sun ZX, Li ZY, He YL, et al., 2009. Coupled solid (FVM)-fluid (DSMC) simulation of micro-nozzle with unstructured-grid., 7(5):621-631. https://doi.org/10.1007/s10404-009-0418-5
Tinto M, DeBra D, Buchman S, et al., 2015. gLISA: geosynchronous laser interferometer space antenna concepts with off-the-shelf satellites., 86(1):014501. https://doi.org/10.1063/1.4904862
Tummala AR, Dutta A, 2017. An overview of cube-satellite propulsion technologies and trends., 4(4):58. https://doi.org/10.3390/aerospace4040058
Varade V, Duryodhan VS, Agrawal A, et al., 2015. Low Mach number slip flow through diverging microchannel., 111:46-61. https://doi.org/10.1016/j.compfluid.2014.12.024
Wang DH, Zhu W, 2011. A phenomenological model for pre-stressed piezoelectric ceramic stack actuators., 20(3):035018. https://doi.org/10.1088/0964-1726/20/3/035018
Wang DH, Zhu W, Yang Q, 2011. Linearization of stack piezoelectric ceramic actuators based on Bouc-Wen model., 22(5):401-413. https://doi.org/10.1177/1045389x10386132
Wang EY, Zhang JX, Li HY, et al., 2021. Relative position model predictive control of double cube test-masses drag-free satellite with extended sliding mode observer., 2021:8887479. https://doi.org/10.1155/2021/8887479
Wang XD, Long J, Zhu Q, et al., 2014. Drag-free control for cold air thrusters based on variable universe adaptive fuzzy PID. Proceedings of the IEEE International Conference on Information and Automation, p.159-163. https://doi.org/10.1109/ICInfA.2014.6932645
Wang YH, Long J, Wang T, et al., 2022. Identification modeling of micro thrust cold gas propulsion system. Proceedings of the 41st Chinese Control Conference, p.1480-1485. https://doi.org/10.23919/CCC55666.2022.9902465
Wang YK, Meng LQ, Xu XS, et al., 2021. Research on semi-physical simulation testing of inter-satellite laser interference in the China Taiji space gravitational wave detection program., 11(17):7872. https://doi.org/10.3390/app11177872
Wang ZG, Zhao H, Duan DY, et al., 2020. Application of improved active disturbance rejection control algorithm in tilt quad rotor., 33(6):1625-1641. https://doi.org/10.1016/j.cja.2020.01.002
Weinert FM, Kraus JA, Franosch T, et al., 2008. Microscale fluid flow induced by thermoviscous expansion along a traveling wave., 100(16):164501. https://doi.org/10.1103/PhysRevLett.100.164501
Wen JM, 2009. Study on Planar Inertia Piezoelectric Moving Mechanism. PhD Thesis, Jilin University, Changchun, China (in Chinese).
Wu SF, Engelen CJH, Chu QP, et al., 2001. Fuzzy logic based attitude control of the spacecraft X-38 along a nominal re-entry trajectory., 9(7):699-707. https://doi.org/10.1016/S0967-0661(01)00036-3
Xu W, Pan L, Gao B, et al., 2017. Systematic study of packaging designs on the performance of CMOS thermoresistive micro calorimetric flow sensors., 27(8):085001. https://doi.org/10.1088/1361-6439/aa7665
Xu XM, Li XC, Zhou J, et al., 2017. Numerical and experimental analysis of cold gas microthruster geometric parameters by univariate and orthogonal method., 23(10):5003-5016. https://doi.org/10.1007/s00542-017-3451-4
Yang YX, Tu LC, Yang SQ, et al., 2012. A torsion balance for impulse and thrust measurements of micro-Newton thrusters., 83(1):015105. https://doi.org/10.1063/1.3675576
Yu DR, Niu X, Wang TB, et al., 2021. The developments of micro propulsion technology based on space gravitational wave detection task., 60(1-2):194-212 (in Chinese). https://doi.org/10.13471/j.cnki.acta.snus.2020.11.09.2020B121
Zeng SH, Yuan ZY, Zhao WW, et al., 2023. Numerical simulation of hypersonic thermochemical nonequilibrium flows using nonlinear coupled constitutive relations., 36(3):63-79. https://doi.org/10.1016/j.cja.2022.09.013
Zhang BC, Li QL, Wang Y, et al., 2020. Experimental investigation of nitrogen flow boiling heat transfer in a single mini-channel., 21(2):147-166. https://doi.org/10.1631/jzus.A1900468
Zhang C, He JW, Duan L, et al., 2019. Design of an active disturbance rejection control for drag-free satellite., 31(1):31-48. https://doi.org/10.1007/s12217-018-9662-1
Zhang HN, Duan BR, Wu LZ, et al., 2021. Development of a steady-state microthrust measurement stand for microspacecrafts., 178:109357. https://doi.org/10.1016/j.measurement.2021.109357
Zhang JZ, Lin JP, Huang D, et al., 2018. Numerical study of heat transfer characteristics of downward supercritical kerosene flow inside circular tubes., 19(2):158-170. https://doi.org/10.1631/jzus.A1600276
Zhang SH, Yu XL, Yan H, et al., 2017. Molecular tagging velocimetry of NH fluorescence in a high-enthalpy rarefied gas flow., 123(4):122. https://doi.org/10.1007/s00340-017-6703-1
Zhang YH, Wang YM, Mao QY, et al., 2016. Orbital reference frame estimation with power spectral density constraints for drag-free satellites., 29(6):1721-1729. https://doi.org/10.1016/j.cja.2016.10.013
Zhou JJ, Pang AP, Liu H, et al., 2022. Precision feedback control design of miniature microwave discharge ion thruster for space gravitational wave detection., 9(12):760. https://doi.org/10.3390/aerospace9120760
Zhu W, Wang DH, 2012. Non-symmetrical Bouc-Wen model for piezoelectric ceramic actuators., 181:51-60. https://doi.org/10.1016/j.sna.2012.03.048
Ziegler B, Blanke M, 2002. Drag-free motion control of satellite for high-precision gravity field mapping. Proceedings of the International Conference on Control Applications, p.292-297. https://doi.org/10.1109/CCA.2002.1040201
Ziemer JK, Randolph TM, Franklin GW, et al., 2010. Colloid Micro-Newton Thrusters for the space technology 7 mission. Proceedings of the IEEE Aerospace Conference, p.1-19. https://doi.org/10.1109/AERO.2010.5446760
Zou S, Cheng ZWT, Zhang X, et al., 2023. Ground-vibration suppression by a matched center of mass for microthrust testing in spaceborne gravitational-wave detection., 19(2):024040. https://doi.org/10.1103/PhysRevApplied.19.024040
微牛级变推力控制技术和无拖曳卫星平台的噪声问题:综述
徐昌一1,李文娅1,刘旭辉2,李永2,张超3
1大连理工大学,控制科学与工程学院,中国大连,116024;2北京控制工程研究所,中国北京,100190;3浙江大学,机械工程学院流体动力与机电系统国家重点实验室,中国杭州,310058
实现空间引力波探测、地球重力场高精度测量、参照系阻力效应测量等基础空间物理量的高精度测量,需要高性能卫星平台在接近“纯重力”的飞行环境中实现“无拖曳控制”。无拖曳控制的关键技术是微牛顿尺度下的变推力控制。推力噪声是实现无阻力飞行最重要的技术指标。因为推力噪声的形成机理和影响规律的物理因素,噪声抑制技术的发展受到限制。针对推力噪声的主要挑战,本文对微牛顿变推力控制技术和无拖曳卫星平台的推力噪声问题进行了系统的综述,并对今后的研究方向进行了讨论。该工作为实现下一代无阻卫星的低噪声变推力控制提供了详细的理解和支持。
空间物理探测;卫星平台;无拖曳控制;微牛级变推力技术;推力噪声
27, 2023;
https://doi.org/10.1631/jzus.A2300104
https://doi.org/10.1631/jzus.A2300104
Revision accepted July 21, 2023;
Crosschecked Sept. 7, 2023
© Zhejiang University Press 2023
猜你喜欢
中国机械工程(2022年22期)2022-11-25 08:24:30
中国机械工程(2022年7期)2022-04-20 03:25:38
军民两用技术与产品(2021年10期)2021-03-16 06:05:06
小学生学习指导(中年级)(2019年10期)2019-10-08 09:11:38
中国机械工程(2019年17期)2019-09-19 07:43:32
中国机械工程(2018年4期)2018-03-06 05:34:58
小学生学习指导(中年级)(2017年4期)2017-03-20 15:46:51
作文与考试·小学高年级版(2016年7期)2016-05-14 05:39:03
电源技术(2016年9期)2016-02-27 09:05:46
小天使·一年级语数英综合(2015年12期)2015-12-22 06:05:50
 Journal of Zhejiang University-Science A(Applied Physics & Engineering)2023年10期
Journal of Zhejiang University-Science A(Applied Physics & Engineering)2023年10期
- Journal of Zhejiang University-Science A(Applied Physics & Engineering)的其它文章
- Using pipette tips to readily generate spheroids comprising single or multiple cell types
- Microfluidic fuel cells integrating slanted groove micro-mixers to terminate growth of depletion boundary layer thickness
- Experimental investigation of the thermal insulation performance of Ce/Si/Ti oxide heat-reflective coating
- Design and comparative analysis of self-propelling drill bit applied to deep-sea stratum drilling robot
- Geo-environmental properties and microstructural characteristics of sustainable limestone calcined clay cement (LC3) binder treated Zn-contaminated soils
- Effect of CO2-mixing dose and prolonged mixing time on fresh and hardened properties of cement pastes