
调相机故障诊断及研究进展*
2023-10-23 05:18:24李俊卿张承志
电机与控制应用 2023年10期
李俊卿, 黄 涛, 张承志
(华北电力大学 电力工程系,河北 保定 071003)
0 引 言
我国能源资源与电力负荷呈逆向分布,高压输电距离长、容量大和区域广的特点突出。其中直流特高压输电具有输送容量大、运行稳定可靠和输电损耗小等突出优势,得到了快速发展和广泛应用[1-2]。
特高压直流输电系统只能传输有功功率,无法向交流电网传输无功功率。当交流电网的无功储备不足或短路容量较小时,就可能出现换相失败和直流闭锁问题,影响电网的稳定运行。因此,在特高压直流输电系统的整流侧和逆变侧,需要大量的动态无功以确保系统安全可靠运行。同步调相机因其优良的动态无功响应能力和转动惯量,在特高压直流输电系统中得到了应用。
同步调相机分别安装于特高压直流输电系统的送端与受端,以保证电网的稳定和安全。特高压直流输电系统的送端有时会产生直流闭锁故障,剩余大量的感性无功,造成暂态过电压,此时的调相机运行于欠励磁状态,以吸收感性无功为主;在受端容易出现逆变器换相失败,造成电网的无功功率不足,继而引起电网电压下降,此时的调相机运行于过励磁状态,以发出感性无功为主。
尽管新一代大容量同步调相机运行时间尚短,但因为其容量大且结构复杂,运行过程中容易发生故障。一旦发生故障将导致交流电网无功功率严重不足,进而发生大规模电压跌落甚至脱网现象,影响电力系统的稳定可靠运行并造成巨大经济损失。目前对于同步调相机故障诊断的研究仍然处于理论研究与试验室仿真验证阶段,距离实际应用于现场还有着距离,但其存在的缺陷已逐渐暴露出来。因此,对同步调相机的故障诊断研究具有十分重要的意义。
目前,由于同步调相机投入使用的时间尚短,对于相关故障参数的收集存在较大困难。其次,实际运行中的同步调相机故障模拟测试耗费巨大,且存在安全隐患。所以目前对同步调相机的故障特性分析,主要是从计算机仿真分析与试验验室模拟分析两方面入手。其中,试验室构建实际物理模型并模拟故障状态的方法可模拟的故障范围小,而计算机仿真能够定性定量地分析各种故障特征,且容易修改相关参数,因此成为研究同步调相机故障诊断的主要方法。
本文分析总结了同步调相机绕组匝间短路、转子偏心、水路堵塞和轴承故障等的产生原因、特征、诊断技术以及研究趋势,对今后的同步调相机故障诊断研究有一定的参考价值。
1 同步调相机的典型故障分析
1.1 定子匝间短路故障
同步调相机是大型旋转设备,其结构复杂。定子匝间短路是其常见故障之一,绝缘破坏、机械振动过大均有可能造成此故障。
定子匝间短路故障的发生往往伴随着大电流,调相机可能发生过热,加大绝缘破坏程度,进而引发系统不稳定等更大事故。同步调相机定子匝间短路示意图如图1所示。图1中,ia、ib、ic为定子A、B、C三相电流;r为匝间短路点的接触电阻;isc为流过接触电阻的短路电流。

图1 同步调相机定子匝间短路示意图
针对同步调相机定子匝间短路的故障特征和故障诊断研究主要集中于匝间短路前后的振动信号和电信号。振动传感器的安装位置和环境噪声会影响诊断的精确性。相较于振动信号,通过分析电信号进行故障诊断则具有更高的稳定性以及更低的成本。
同步调相机在进行定子匝间短路故障诊断的过程中需要考虑励磁电流变化对故障特征的影响。文献[3]研究了同步调相机定子匝间短路故障后的振动特性,并考虑了欠励磁、过励磁以及励磁电流的变化对故障特征的影响。同步调相机发生定子匝间短路故障时,定子振动的100 Hz、200 Hz和300 Hz分量会变大。此外,故障特征分量的幅值将随着定子匝间短路故障的恶化而增加。无论是在欠励磁下还是在过励磁下,此规则都是适用的。而定子振动的300 Hz分量随着励磁电流的增大,在欠励磁状态下随之降低;在过励磁状态下随之增加。100 Hz、200 Hz分量始终随着励磁电流的增大而增大。
目前,更多文献将调相机定子匝间短路的故障特征研究集中于无功功率和电流等电信号。在欠励磁状态下,定子匝间短路会使吸收的无功功率与故障相电流增大,且幅度随着故障程度的加深而增大,励磁电流的增加会降低吸收的无功功率与故障相电流;在过励磁状态下,定子匝间短路会使输出无功功率与故障相电流减少,且减少幅度随着故障程度的加深而增大,励磁电流的增加会使调相机向电网输出的无功功率与故障相电流增大[3]。而从电信号的谐波出发,故障特征分量因运行工况的改变而造成的变化趋势不同的问题可以得到改善。文献[4]提出以相电流的三次谐波作为诊断定子绕组匝间短路故障和识别故障相的指标。相电流的三次谐波不受励磁电流的影响,始终随短路程度的增大而增大,且故障相电流中的三次谐波大于其他两相,能对故障发生相实现判别[4]。文献[5]则利用励磁电流中的二次谐波诊断定子匝间短路故障。该方法不需要调相机的参数,因此可以提高故障诊断方法的鲁棒性;也不需要定子侧的电流和电压信息,因此可以减小电网侧的影响[5]。但利用电信号的谐波作为故障诊断依据,还需要考虑是否与其他类型的故障存在交叉问题。例如,文献[6]提出了基于瞬时功率偶次谐波幅值的诊断方法。研究发现瞬时功率中100 Hz的谐波分量幅值增大量最为突出,对轻微定子匝间短路有很好的诊断效果。但文献[6]没有对调相机发生转子匝间短路情况下诊断有效性进行验证,事实上转子匝间短路也会造成瞬时功率偶次谐波增大,因此可能发生误判[7]。
除此之外,也有学者从不同物理量之间的关系出发,对调相机定子绕组匝间短路进行故障诊断。文献[8]提出了一种基于相电流与励磁电流之比的故障指示器(FI)。FI通过V形曲线不断更新不同励磁电流下的参数,因此也能够消除励磁电流的干扰,并能对定子匝间短路早期故障进行诊断[8]。文献[9]利用励磁电流与各相电流之间的关系进行故障诊断。励磁电流与故障相的相电流在不同程度的定子匝间短路故障下始终保持线性关系,而与非故障相的相电流则呈现非线性关系。随着故障程度的加深,这种非线性程度也不断加大,可由此判别故障相及其故障程度。以上两种方法不需要侵入调相机内部,便于在工程实际中应用。文献[10-11]则从故障相的故障支路与非故障支路间电流的关系出发,分析了调相机定子匝间短路故障发生时故障相支路电流的变化。调相机故障相故障支路的电流增大,故障相的非故障支路电流减小,两支路电流之间出现较大的相位差。故障相支路电流间的相位差要远大于非故障相支路电流间的相位差,且随着故障程度的加深,相位差的程度也不断加大。这种基于故障相支路电流间相位差的诊断方法基本不随运行工况的改变而变化,可靠性好,理论上可以实现定子绕组匝间短路的故障相定位。但当前投运的同步调相机,定子每相的两条支路上并没有安装电流传感器,因此该方法目前在现场中的应用受到限制。文献[12]以电枢电流与励磁电流所形成的V形曲线偏移程度诊断调相机定子匝间短路故障。发生定子绕组匝间短路故障时,故障相的故障支路电枢电流增大,其V形曲线会向上偏移,而故障相的非故障支路的电枢电流降低,其V形曲线会向下偏移,故障相整体V形曲线呈向上偏移的趋势;非故障相V形曲线的偏移趋势与故障相的整体偏移趋势相同。此种方法无需增加新的测点,在过励磁的情况下更容易识别定子匝间短路故障。文献[13-14]则从零序电压基波分量和定子电流之间的关系出发,以零序电压基波分量的幅值是否大于阈值来判断是否发生定子绕组短路故障,再用零序电压基波分量和故障相的相电流之间的最小相位差来确定故障相。故障程度、位置以及运行工况的改变均不影响故障识别与故障相定位的准确性。
目前,也有运用神经网络对调相机定子匝间短路进行故障诊断的文献。文献[15]提出了一种基于改进K均值聚类算法的RBF神经网络故障诊断算法并可以用于调相机的定子绕组匝间短路。文献[16]通过能量全连接层学习故障信号的特征分量,增强信号的瞬态特征,同时对数据进行自适应压缩,对有效特征进行分布式映射,通过试验证明这种诊断方法具有较高的诊断正确率。文献[17]针对调相机轻微定子匝间短路故障难以辨识的问题,提出了基于稀疏深度森林的调相机轻微定子匝间短路故障诊断方法。将定子电流的1、3、5、7次谐波幅值作为预特征,再利用稀疏滤波网络将特征信息增强,然后在深度森林中引入XGBoost和逻辑回归的基学习器,具有较高的诊断精度与效率[17]。
综上所述,对于调相机定子绕组匝间短路故障诊断大多以对故障信号进行机理分析为主。定子匝间短路的故障特征主要为定子振动信号中的谐波分量变化,定子相电流或者支路电流的幅值、相位差和谐波含量的变化,无功功率的变化以及V形曲线的变化等。对故障信号进行预处理后利用神经网络进行诊断具有准确率高的优点。
1.2 转子匝间短路故障
对于大型同步调相机,其转子绕组匝间短路故障在初期并不严重,调相机可以运行。然而若工作条件不佳,如定子三相电压不对称,其负序旋转磁场会在转子绕组中感生倍频电流,从而使短路环电流增大,短路点温度上升,相邻绕组绝缘老化加快。因此若有轻微转子绕组匝间短路故障的调相机继续长期运行会导致严重故障,进而给电网造成巨大损失。
同步调相机转子匝间短路示意图如图2所示。其中,Ees为励磁系统电动势,Res为励磁系统电阻,Zsc为短路部分阻抗,Rfkl为短路接触电阻,if、ifkl分别为励磁电流与励磁短路电流。
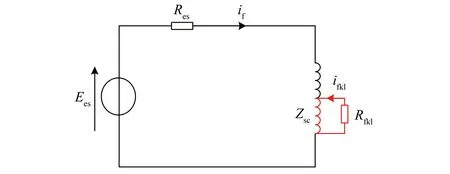
图2 同步调相机转子匝间短路示意图
文献[18-19]推导了短路匝数与转子绕组励磁电流之间的关系,提出了可以通过转子励磁电流来初步判断转子绕组匝间短路的严重程度。此外,文献[19]设计了小波模型提取出故障信号的特征能量值,输入径向基函数神经网络进行故障诊断。文献[20]发现在发生转子匝间短路后会引起调相机偶数次谐波磁场增强,定子铁心的穿心螺杆与支持筋上的感应电动势都出现了偶次谐波。根据偶次谐波电压之和与基波比值诊断调相机转子匝间短路故障,根据两穿心螺杆叠加感应电势波形上突变点的位置判断故障槽的位置,实现了转子绕组匝间短路故障诊断和定位[20]。文献[21]还研究了换相失败前后,带转子绕组匝间短路故障运行的调相机气隙磁场和转子所受不平衡磁拉力的变化特征。文献[21]发现当仅发生转子匝间短路时,同步调相机气隙磁密产生畸变,气隙磁密中出现了偶次谐波,调相机中产生了不平衡磁拉力。而当换相失败也发生时,同步调相机气隙磁密偶次谐波含量与不平衡磁拉力两故障特征较之前更突出,可以用于诊断转子绕组上发生的轻微匝间短路故障[21]。
除以上从电磁角度分析转子匝间短路的故障诊断方法外,文献[22]从温度场和热应力的角度分析了大型水内冷电机转子内冷水系统堵塞和转子绕组匝间短路故障。研究发现两类故障都会引起转子温度畸变,并且故障处的畸变最为明显。除此之外,仅发生水路堵塞的温升要比两类故障共同发生的温升高,水路堵塞也会导致故障处热应力增大[22]。
此外,也有学者对故障特征信号进行处理后直接诊断或者利用算法进行诊断。文献[23]建立RBF神经网络模型对故障信号进行分析,结果表明有较高的诊断正确率与较少的诊断时间。文献[24]采用有限元方法模拟了同步调相机存在转子匝间短路时发生换向故障前后的气隙磁通密度、转子振动和定子振动等信号,然后利用DS证据理论对故障特征进行融合,可诊断调相机转子绕组弱匝间短路故障。
综上,关于同步调相机转子匝间短路故障分析主要集中于故障特征和故障诊断方法的研究。转子匝间短路故障特征主要为励磁电流的变化、气隙磁密中的二次谐波、转子受到不平衡电磁力和转子热应力的变化等。故障诊断主要有基于故障特征的直接诊断和通过神经网络等算法进行诊断两种方式。
1.3 转子静、动偏心故障
由于制造工艺不足或者受到电网冲击致使同步调相机定转子之间的气隙分布不均的现象称为转子偏心。而根据偏心发生后导致的转子旋转中心不同,又可以将转子偏心分为静偏心、动偏心和混合偏心。
静偏心,也称安装偏心,主要由于电机定子安装不当或本身不均匀造成的。转子发生静偏心时轴承位置发生变化,转子绕偏心后轴承中心旋转,气隙最小长度位置不变。动偏心,又称为质量偏心,是由电机转轴发生弯曲、轴承磨损等引起的。转子动偏心发生后转轴仍绕偏心前轴承中心旋转,气隙最小长度位置随着转子旋转而改变。混合偏心,又称动静混合偏心,静偏心、动偏心故障同时发生时称为混合偏心。静偏心、动偏心示意图如图3和图4所示。图3和图4中,αm为调相机的机械角,t为时间,g(αm,t)为调相机的气隙。
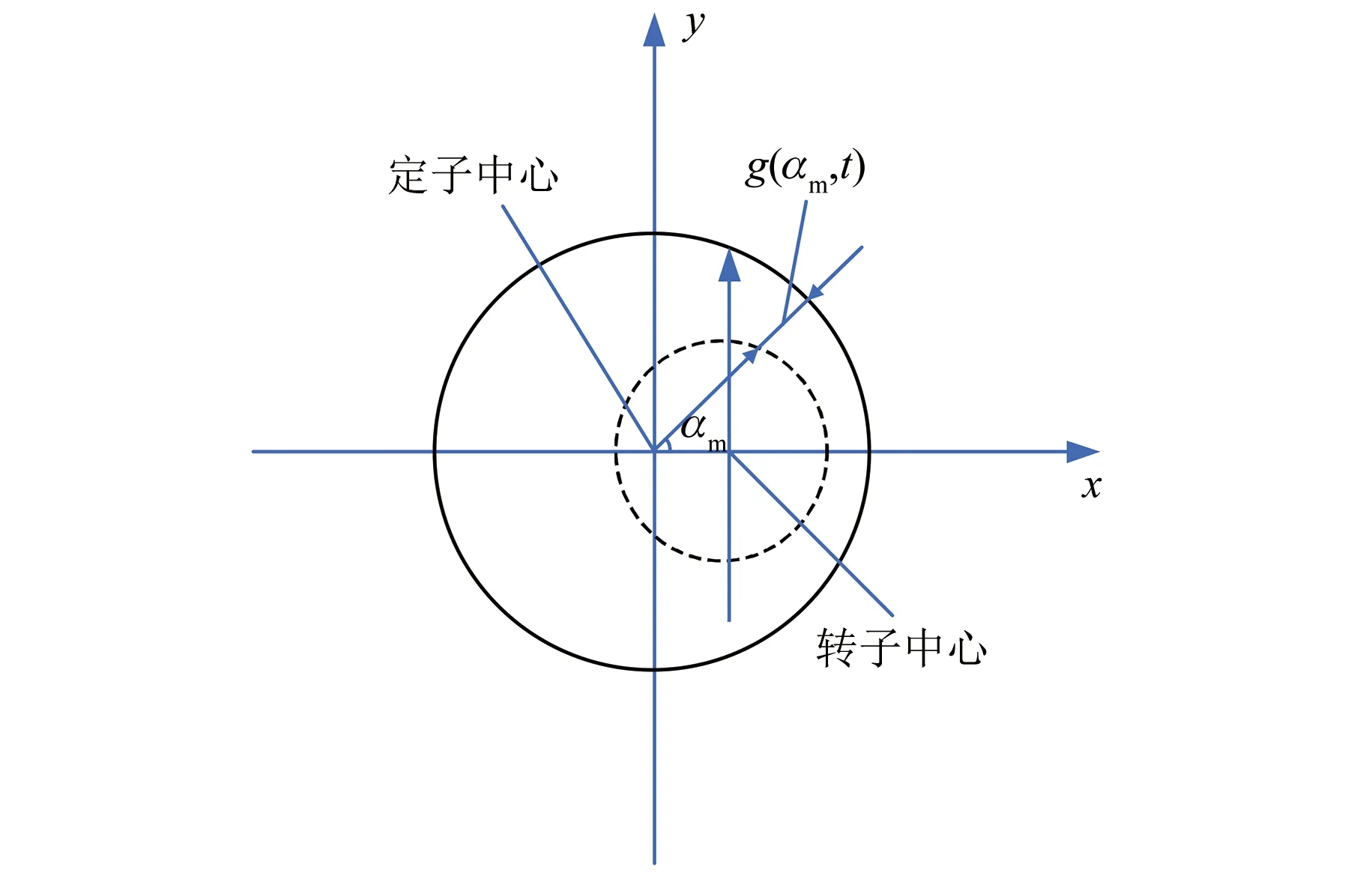
图3 同步调相机转子静偏心示意图

图4 同步调相机转子动偏心示意图
目前,对转子偏心故障的研究主要集中于调相机的电磁特性和振动特性两方面。文献[25]分析了同步调相机在转子偏心作用下的电磁特性。当同步调相机出现转子偏心故障时,气隙磁通密度的偶次谐波明显增加,其中二次谐波增加最快。同时,电磁力的2倍频率分量明显变得更大,并且该特征量随着偏心度的增加而增加。电磁转矩将随着偏心率的增加而减小,但电磁转矩的高频谐波将随着偏心率的增加而增加。文献[26-27]从同步调相机发生转子偏心故障的振动特性出发,发现静态偏心故障造成的振动频率以二倍频的偶次谐波为主,二倍频振动幅值增大;而动偏心故障的振动频率以基波为主,各个倍频振动幅值均有增大,故障程度越高,幅值增长越大。
除单一分析电磁特性和振动特性外,也有学者对这两个特性进行综合考虑来对转子偏心故障进行诊断研究。文献[28]提出了基于磁密谐波和振动特征的大型调相机动态偏心故障诊断方法。研究发现偏心后气隙磁密出现偶次谐波,定子出现奇数倍频振动的故障特征,两故障特征都随故障程度的增加而增加。利用两故障特征结合的诊断方法不受运行状态的影响,更加准确。文献[29]对调相机偏心故障下气隙磁密、不平衡电磁力以及定转子振动特性进行了分析,并综合比较了快速傅里叶变换、加窗傅里叶变换、小波分析及小波包分析在信号特征提取上的特点,提出了基于小波包-神经网络的故障诊断算法。
除上述对单一转子偏心故障诊断研究外,也有学者对包含转子偏心故障的复合故障进行研究。文献[30-31]从气隙磁密和转子不平衡磁拉力的角度出发,分析了换相失败和转子匝间短路下的静偏心故障特点。发现复合故障会使得气隙磁通密度和不平衡磁拉力的故障特征进一步扩大,且在复合故障出现时,振动响应曲线会变得更加复杂。文献[32]对强励极端稳态工况下的转子动偏心和匝间短路引发的磁场不平衡和电磁力进行了研究。研究发现两类故障都引起磁场不平衡,转子动偏心引起的不平衡电磁力增幅较小,而转子绕组匝间短路会引起不平衡电磁力增加数倍[32]。文献[33]研究了转子偏心、定子绕组匝间短路及其复合故障下大型同步调相机的稳态和动态故障特性。在偏心故障导致的定子并联支路环流频率方面,静态偏心以基波为主,动态偏心以偶次谐波为主[26]。选择定子绕组并联支路环流和无功功率输出作为区分故障的指标。研究发现可以通过比较定子绕组循环电流和无功功率的波形、FFT频谱和大小来区分这些故障。
综上所述,调相机的偏心故障研究一般是通过有限元仿真获得故障特征信号,再直接利用故障特征信号或利用处理后的故障特征信号进行诊断。常见的故障信号有气隙磁密、转子不平衡电磁力和振动信号等。
1.4 定子水路堵塞故障
新一代大容量同步调相机的冷却方式之一为双水内冷。以水作为冷却介质会产生冷却水路堵塞以及空心股线漏水等问题,其中定子水路堵塞是导致电机发生冷却系统故障的最大因素。水路堵塞会造成电机过热,破坏绕组及绝缘,严重时甚至会烧坏电机。定子温升受冷却水流速和进水温度双重影响,进水温度越低、冷却水流速越快则冷却效果越好[34]。
目前对定子水路堵塞故障的研究文献较少,主要集中在流体场和温度场两方面。文献[35]通过有限元方法对发生定子水路堵塞的双水内冷调相机的定子流体场和温度场进行分析。研究发现定子水路发生堵塞时,会使得堵塞空心股线的水冷却流速下降、堵塞支路水路的出口温度上升,且这种趋势随着故障程度的增加而增加[35]。文献[36]分析了不同位置的空心股线水路堵塞时的温升趋势,提出了温度与流速相结合的故障诊断构想。文献[37]分析了上下层线棒空心股线分别堵塞时定子的温度分布,研究发现上层线棒发生故障时对电机温度的影响比下层线棒更大。
1.5 其他故障
轴承是调相机组重要的组成部分之一,一旦发生故障可能导致机组停机且维护成本较高。文献[38]提出了一种基于随机子空间识别-多核支持向量机(SSI-MSVM)的调相机轴承故障诊断方法。通过SSI对采集到的调相机轴承振动信号进行预处理,采用正交投影和奇异值分解得到状态矩阵,再利用参数估计获取系统矩阵及特征值。最后,对MSVM进行有监督的训练,实现对调相机轴承故障的识别诊断。
在同步调相机中,转子绕组接地也是常见的故障之一。由于励磁系统在同步调相机中隔离,励磁绕组的单个接地故障不会造成直接危险。但是,如果发生第二次接地故障,则励磁绕组会部分短路且故障电流升高,从而导致严重损坏。因此,必须立即检测到励磁绕组的单个接地故障。文献[39]提出了基于接地电阻两侧电压幅值和相位角的故障诊断方法,这两种方法具有相同的结构。论文给出了转子接地故障的双重诊断准则,以提高同步调相机诊断的有效性。
通过上述分析可见,同步调相机各类故障的特征既有不同,也有交叉。同步调相机故障类型与故障特征之间的关系如表1所示。
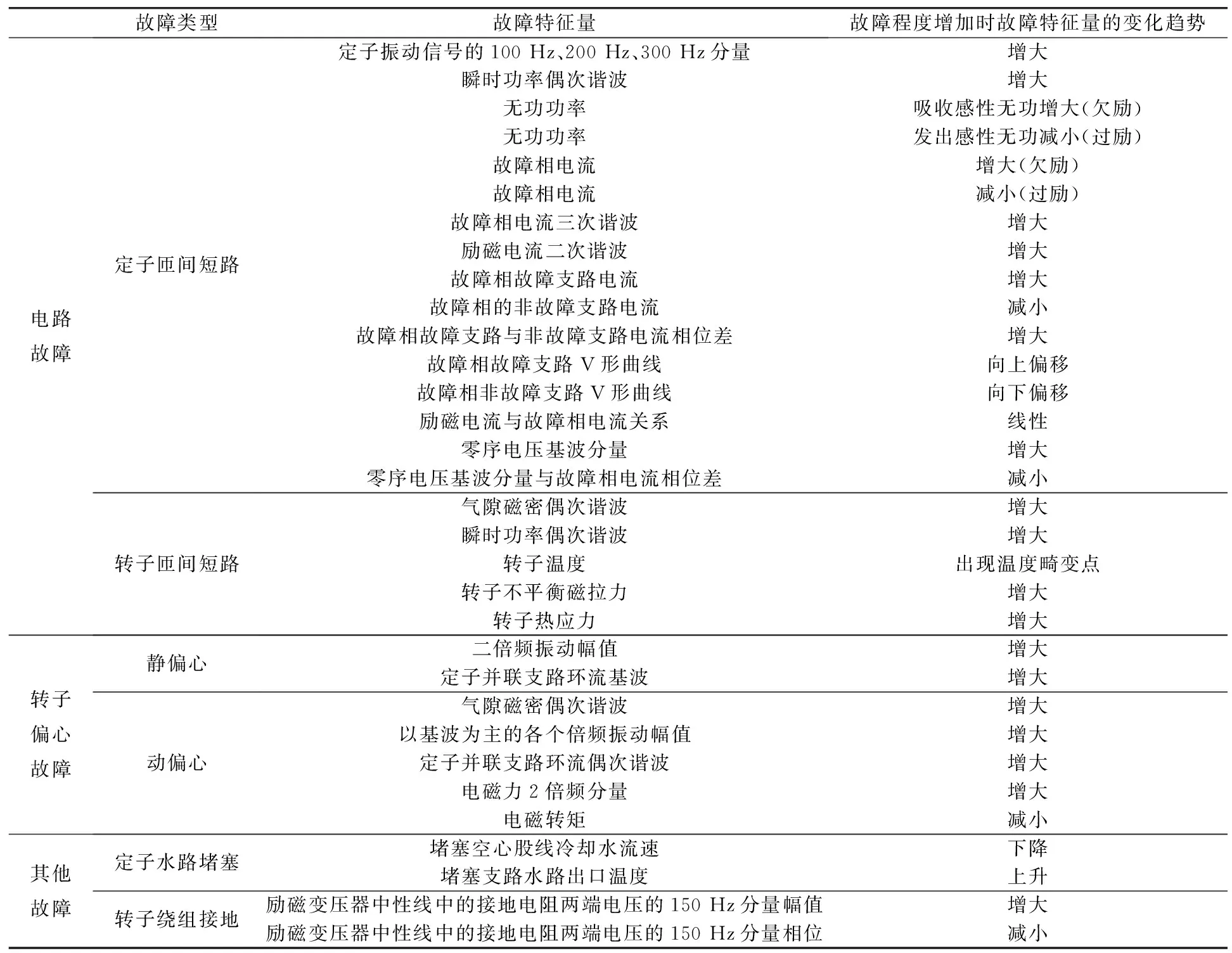
表1 故障类型和故障特征量对应关系
2 当前研究存在的挑战
可以看出,对于调相机故障诊断的研究主要以故障仿真和信号处理为主,不过仍然存在如下挑战:
(1) 调相机故障特征信号难以获取
从现有文献来看,除定、转子电流和功率的数值等易获取信号外,调相机的故障特征还包含了诸如电流、功率、气隙磁密等物理量的谐波和电流间或者电流与电压间的相位差等,而这些故障特征量的获取需要很高的数据采集频率。定子绕组支路电流、定子绕组支路间环流等故障特征量的获取,则需要在调相机内部定子绕组支路上装有电流传感器。目前已投运的调相机的数据采集频率很低,文献中所述的故障特征信号尤其是谐波信号和相位差信号难于获取。另外,已投运的调相机也没有在定子绕组支路中安装电流传感器。这些因素给同步调相机的故障特征采样和故障诊断造成了困难。因此,如何从可获得的物理量中寻找调相机的故障特征是值得深入研究的问题。
(2) 依据单一特征量进行故障诊断存在不准确性
调相机实际运行工况中因为制造工艺和环境噪声等影响,会出现和故障情况下相似的特征,如电压波动和闪变造成调相机定子电流出现谐波。除此之外,不同故障的故障特征存在相互交叉的情况。例如,同步调相机在发生定子匝间短路和转子匝间短路都会造成瞬时功率偶次谐波增大[13-14];强励极端稳态工况下同步调相机转子动偏心和转子绕组匝间短路都会引发磁场不平衡和电磁力增大[23]。因此,若使用单一故障特征量作为故障诊断的依据,容易出现误诊现象。在今后的调相机故障诊断研究中,要尽可能地选取多个故障特征量进行联合诊断,以提高故障诊断的准确性。
3 结 语
本文主要分析总结了同步调相机定子绕组匝间短路、转子绕组匝间短路、转子偏心、定子水路堵塞、轴承故障、转子绕组单点接地、匝间短路与转子偏心同时存在等不同故障形式的产生原因、故障特征和诊断方法,并对各种故障诊断方法的优缺点进行了对比分析。
目前对同步调相机故障诊断的研究,基本上处于理论仿真和试验室验证阶段。所得到的诊断方法距离应用于现场还存在很大差距,之后的研究需要考虑到环境噪声、供电电压波动或闪变等外部因素对故障特征分量的影响问题。另外,新一代大容量同步调相机装有数据采集系统,获得了庞大的数据量。通过深度学习人工智能等技术对同步调相机进行故障诊断,已经被证明具有较高的精确性与可靠性,如何充分利用这些数据实现调相机的在线故障诊断也是未来的发展方向之一。
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:08
大电机技术(2022年1期)2022-03-16 06:40:10
河北电力技术(2021年2期)2021-07-29 09:16:30
快乐语文(2018年7期)2018-05-25 02:32:15
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
小说月刊(2015年9期)2015-04-23 08:48:23
电机与控制应用(2015年2期)2015-03-01 03:49:29
人生十六七(2015年5期)2015-02-28 13:08:24
大电机技术(2015年5期)2015-02-27 08:22:30
