永磁同步电机鲁棒双矢量模型预测电流控制
2023-10-21 09:00:06郭鑫,宗剑,姜豪
组合机床与自动化加工技术 2023年10期
郭 鑫,宗 剑,姜 豪
(上海应用技术大学电气与电子工程学院,上海 201418)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)因其高精度、高效率和卓越的性能等特点在工业领域被广泛应用[1],其能够适应高技术船舶、先进轨道交通、高档数控机床和性能汽车等国家重点发展领域和新型产业的严格的技术要求,在降低电机系统能耗方面,PMSM同样展现出良好的应用前景[2]。PMSM系统作为典型的非线性系统,经典的控制方法如磁场定向控制(field oriented control,FOC)[3]、直接转矩控制(direct torque control,DTC)[4]在某些特定情况下无法达到令人满意的性能。因此,学者们提出了模糊控制(fuzzy control,FC)、鲁棒控制(robust control,RC)、滑模控制(sliding-mode control,SMC)、模型预测控制(model predictive control,MPC)等控制方法来解决上述的问题。其中,MPC因其多目标、多变量和多约束等控制特点,成为国内外学者研究的热点[5]。
MPC根据目标函数所对应控制动作的不同可以大概地分为两类:连续控制集(continuous control set,CCS)MPC,有限控制集(finite control set,FCS)MPC[6],其中FCS-MPC通过目标代价函数计算各开关状态对应的电压矢量的控制效果来选择最优矢量,不需要额外的调制单元,直接操作逆变器的开关实现控制,具备高性能、易应用等优点,但其单个控制周期只能输出一个开关状态,电流谐波和转矩脉动较大[7]。因此有学者提出单个周期内输出多矢量的控制策略,DAVARI等[8]提出一种将零矢量作为第2电压矢量输出的控制策略,相较于传统单矢量MPC,这种基于占空比控制策略可以输出幅值可变的电压矢量,但方向无法改变。针对第2电压矢量总是零电压矢量的问题[8],ZHANG等[9]提出了一种广义的双矢量控制策略,允许第2电压矢量的任意选择,进一步扩展了电压矢量的输出范围,但由于计算量较大,对硬件要求过高。
模型预测电流控制(model predictive current control,MPCC)高度依赖于预测模型的准确性[10],不准确的模型参数会直接影响系统的性能和运行状态,这种参数敏感性在双矢量模型预测电流控制中更为明显,参数失配不仅会导致电压矢量的错误选择,也会影响电压矢量的作用时间,进一步降低了系统的性能[11]。为了解决参数失配对控制系统的影响,陈卓易、ZHANG等[12-13]将超局部模型的思想应用于PMSM中,即只用考虑输入输出而不必考虑内部参数的影响,将带参数的已知干扰项和位置干扰项归为一个系统的总干扰项,如此便可以减小参数依赖性并提高控制模型的鲁棒性。ZHANG等[14]在无差拍预测电流控制的基础上加入扰动观测器,降低了电机参数与模型参数失配导致的系统性能降低。YANG等[15]提出了一种自适应扰动观测器,降低了电流脉动,提高了系统对电感参数的鲁棒性,但其仅考虑电感参数失配的情况,而未考虑定子电阻和永磁体磁链参数失配的情况。
针对模型参数失配导致双矢量模型预测电流控制性能下降的问题,本文提出了一种鲁棒双矢量预测电流控制,从电流预测值和电压矢量作用时间两个方面对双矢量模型预测电流控制的参数敏感性进行分析,引入了无模型控制中超局部模型的概念,提出了改进超局部模型重构电流预测模型,设计扩展滑模观测器对超局部预测模型中的未知扰动项进行观测,由超局部预测模型选择最优电压矢量并计算作用时间。仿真实验结果表明,所提方法消除了传统双矢量模型预测电流控制因参数失配导致的电流预测值和电压矢量作用时间的误差,在参数失配的情况下具有良好的性能。
1 永磁同步电机数学模型
三相PMSM在d-q坐标系下的电压方程为:
(1)
式中:ud和uq分别为定子电压d-q轴分量,id和iq分别为定子电流的d-q轴分量,R为定子电阻,ψd和ψq分别为定子磁链的d-q轴分量,ψd=Ldid+ψf、ψq=Lqiq,其中Ld和Lq分别定子电感的d-q轴分量,本文选用表面式PMSM,所以Ld=Lq=L;ψf为永磁体磁链,ωe为转子电角速度。
PMSM在d-q坐标系下的电磁转矩方程表示为:
(2)
式中:np为极对数。
PMSM在d-q坐标系下的机械运动方程表示为:
(3)
式中:J为转动惯量,TL为负载转矩,Bm为转矩阻尼系数,ωm为机械转速。
2 永磁同步电机模型预测电流控制
2.1 单矢量模型预测电流控制
将式(1)离散化,得到k+1时刻电流预测模型为:
(4)
传统FCS-MPCC根据式(4)得到下个周期的电流预测值,三相两电平逆变器具有8种不同的开关状态,每种状态对应一个电压矢量,根据有限集模型预测控制的思想,遍历逆变器所有开关状态下的电流预测值,为了保证电流的准确跟踪,需要代价函数对电流预测值的误差进行判断,选取使d-q轴电流预测总误差最小的电流预测值,将其对应的开关状态在下个周期输出,价值函数表示为:
(5)

2.2 双矢量模型预测电流控制
由于单矢量预测电流控制在单个控制周期内只能输出单个电压矢量,且目标的电压矢量只有8个,难以达到令人满意的性能。双矢量模型预测电流控制在单个控制周期内输出两个有效的电压矢量,并合理的分配其占空比,相较于单矢量预测电流控制,增大了输出电压的幅值和角度的范围,具有更好的性能。
双矢量模型预测电流控制中,其中第1电压矢量的选取与单矢量预测电流控制方法一致,将8种电压矢量代入价值函数中,选取使价值函数最小化的电压矢量作为第1最优电压矢量。为了简化第2电压矢量的选择,本文提出一种简化的矢量选择方式,即仅考虑与第1电压矢量相邻的2个电压矢量和零矢量,将其分别与第1电压矢量结合为3种可能的候选组合,电压矢量选择的原理如图1所示,当第1电压矢量为V3时,第2电压矢量可能的选择为V2、V4和V0(或者V7)。以价值函数最小化为原则选取最优的电压矢量组合,则d-q轴电压表示为:

(a) 电压矢量选择范围示意图 (b) 矢量选择示意图图1 双矢量MPCC电压矢量示意图
(6)
式中:t为第1电压矢量的作用时间,两个矢量共同作用一个采样时间Ts,故第2电压矢量作用时间为(Ts-t)。式(4)的电流预测模型可以进一步由电流变化率表示:
(7)
式中:sd1、sq1、sd2、sq2分别为第1、第2电压矢量作用下d-q轴电流分量的变化率,由式(1)得零矢量作用下d-q轴电流变化率为:
(8)
进一步,将第1和第2电压矢量作用下,d-q轴电流分量的变化率表示为:
(9)
以q轴电流无差拍跟踪为原则,求解第1电压矢量的作用时间t的表达式为:
(10)
3 双矢量模型预测电流控制参数敏感性分析
3.1 预测电流模型误差分析
电机在运行过程中,其内部参数会受到温度、磁场饱和、运行状态等因素影响,这将导致参数摄动和模型参数失配,使得控制精度和工作性能大幅下降。考虑参数变化和未知扰动的情况,电流预测模型为:
(11)
(12)

(13)
(14)
由式(13)、式(14)可知,定子电阻、定子电感和永磁体磁链的模型参数失配会导致电流预测产生误差,进而影响第1和第2电压矢量的选择。
3.2 电压矢量作用时间误差分析
(15)

(16)

(17)
由参数失配导致的第1电压矢量作用时间误差Et为:
(18)
由式(18)可知,定子电阻、定子电感和永磁体磁链的模型参数失配会导致第1和第2电压矢量的作用时间分配出现误差,进而导致系统无法输出准确的最优电压矢量。
4 永磁同步电机鲁棒双矢量预测电流控制
4.1 永磁同步电机的改进超局部模型
传统超局部模型对于未知扰动F进行观测后代入预测模型中进行计算,但随着系统参数由于内外在的扰动而发生变化,这将导致F的观测值也不再准确,因此本文对原模型的状态变量进行扩展。对于单输入单输出系统的非线性系统,改进超局部模型表示为:
(19)
式中:x表示系统状态变量,y为系统输出,u为系统输入,α为模型的比例因子,理论上αu应和y保持同一数量级;β为线性部分增益,F为可观测的非线性未知扰动部分的集合,其满足Lipschitz有界性和Lebesgue可测量性;f表示未知扰动部分F的变化率。
根据式(1)、式(19)构造PMSM电流环超局部模型为:
(20)
(21)
式中:αd和αq分别为d-q轴电压增益,βd和βq分别d-q轴的电流增益,Fd和Fq分别表示系统未知扰动在d-q轴的分量,fd和fq分别表示Fd和Fq的变化率。
将式(20)、式(21)离散化,得离散电流预测模型为:
(22)
(23)
4.2 扩展滑膜观测器设计
为了实现对未知扰动F的准确观测,根据式(20)、式(21)设计滑模观测器为:
(24)
(25)

定义电流误差和扰动误差为:
(26)
(27)
式中:ed和eq分别为d-q轴电流估计值与反馈电流的误差,efd和efq分别为d-q轴未知扰动估计值与实际值的误差。
将ed和eq作为滑模面,为确保误差能够在有限时间内快速收敛至滑模面,选取指数趋近律为:

(28)
式中:s=[sdsq],sgn为符号函数,ε和λ为待设计的参数。
将efd和efq视为扰动,则滑模控制函数为:
Idsmo=-εsgn(ed)-λed-βded
Iqsmo=-εsgn(eq)-λeq-βqeq
(29)
由式(29)确定的观测器满足Lyapunov稳定。
证明:选取Lyapunov函数V:
(30)
对V求导为:
(31)
根据Lyapunov稳定性判据,设计的滑模观测器需满足:
(32)

(33)

(34)
由式(33)、式(34)可知,参数ε和λ需满足:
(35)
综上所述,在设定合适参数的情况下,所设计的观测器渐进稳定。在实际应用中,需将观测器离散化,即:
(36)
(37)
4.3 电压矢量作用时间计算
由式(20)、式(21)得零矢量作用下d-q轴电流变化率为:
(38)
进一步,第1、第2电压矢量作用下,d-q轴电流分量的变化率表示为:
(39)
根据q轴电流无差拍原则,将式(39)代入式(10)中可得第1电压矢量作用时间,并与第2电压矢量共同作用一个周期Ts,将两个最优电压矢量和其对应的作用时间通过脉冲发生器输出到逆变器中,采用两步预测的方式进行延时补偿,具体的控制流程框图如图2所示。

图2 鲁棒双矢量MPCC系统框图
5 仿真实验结果分析
为了验证所提出的鲁棒双矢量MPCC控制算法的有效性,采用MATLAB/Simulink平台搭建PMSM驱动系统仿真模型,仿真中所用电机的参数如表1所示。PMSM驱动系统采用id=0控制策略,额定转速为1500 r/min,转速环采用PI控制器,设定参数为:Kp=1、Ki=3.5。超局部预测模型中,αd=αq=1/L=1100,βd=βq=-L/R=-90。扩展滑模观测器中,εd=εq=3000,λd=λq=0.1,gd=gq=300。

表1 PMSM标称参数值
图3~图6为参数失配情况下,传统双矢量MPCC和所提出的鲁棒双矢量MPCC控制的d-q轴电流的对比仿真结果,根据参数敏感性分析,电阻参数对系统性能影响较小,所以实验中仅考虑电感和永磁体磁链发生变化的情况。PMSM在启动时给定转速为1000 r/min,给定转矩10 N·m。
(a) 传统双矢量MPCC (b) 所提鲁棒双矢量MPCC图3 电感参数在0.05 s时突降至0.5 L的电流响应

(a) 传统双矢量MPCC (b) 所提鲁棒双矢量MPCC图4 电感参数在0.05 s时突增至1.8 L的电流响应
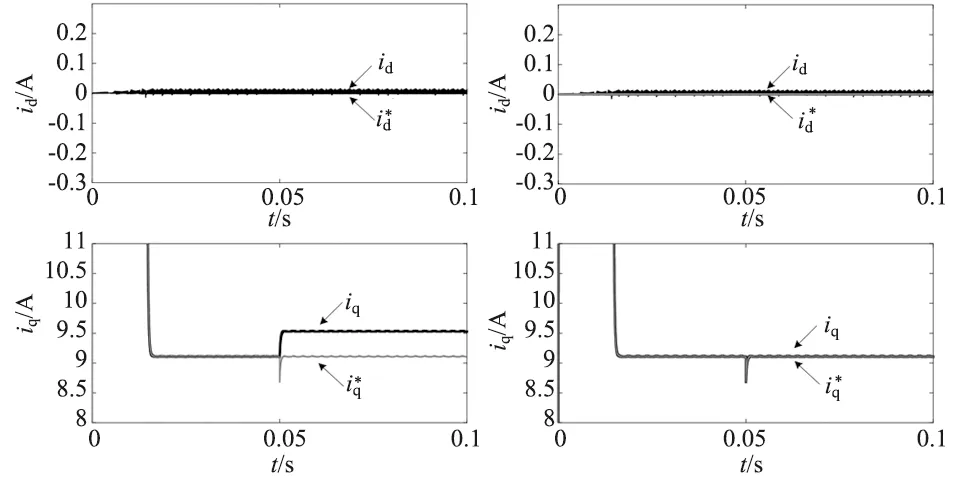
(a) 传统双矢量MPCC (b) 所提鲁棒双矢量MPCC图5 永磁体磁链参数在0.05 s时突降至0.5ψf的电流响应
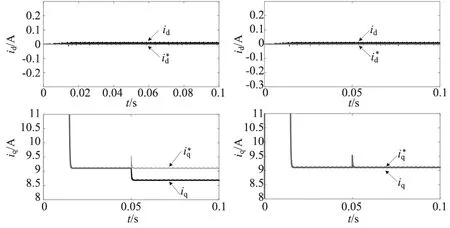
(a) 传统双矢量MPCC (b) 所提鲁棒双矢量MPCC图6 永磁体磁链参数在0.05 s时突增至1.5ψf的电流响应
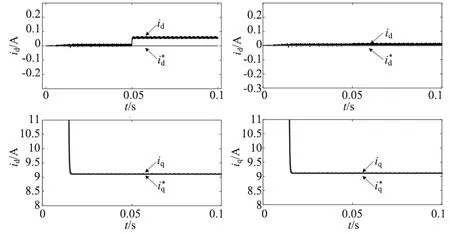
如图3a所示,当预测模型中电感参数在0.05 s时突降至0.5 L,传统双矢量MPCC的d轴电流给定值和实际值出现明显的跟踪误差。如图4b所示,当预测模型中电感参数在0.05 s时突降至0.5 L,所提出方法的d轴电流受扰动影响较小,能够稳定跟踪给定值。如图4a所示,当预测模型中的电感参数在0.05 s时突增至1.8 L,传统双矢量MPCC的d轴和q轴的电流脉动明显增加,且无法准确跟踪给定值,系统性能显著下降,如图4b所示,由于电流中因电感参数变化导致的误差通过扩展滑膜观测器得以补偿,因此所提鲁棒双矢量MPCC控制的d-q轴电流仍能保持良好的性能。
如图5a、图6a所示,当预测模型中的永磁体磁链参数发生突变时,传统双矢量MPCC的d轴电流并无影响,而q轴电流出现明显的跟踪误差,电流性能明显下降。如图5b、图6b所示,在永磁体磁链发生参数失配时,所提鲁棒双矢量的MPCC的q轴电流在参数突变的瞬间产生脉动,但系统中的扩展滑膜观测器能够准确观测参数失配导致的误差并进行补偿,使得电流在短时间内能稳定至给定值,系统稳态性能更佳。
为了进一步比较验证传统双矢量MPCC和所提方法在电感和永磁体磁链同时存在参数失配时的动态性能,设定系统初始状态下存在多个参数失配,给定转速为1000 r/min,给定转矩初始为10 N·m,在0.05 s时突增至20 N·m。如图7a所示,在初始电感参数为0.5 L、永磁体磁链参数为0.5ψf的情况下,传统双矢量MPCC的q轴电流存在明显的稳态误差,在0.05 s给定转矩突增后,无法准确跟踪至给定值。如图7b所示,所提的鲁棒双矢量MPCC消除了q轴电流的稳态误差,且在转矩突增后能准确跟踪给定值,具有更好的动态性能。如图7c、图7d所示,在初始电感参数为1.8 L、永磁体磁链参数为1.5ψf的情况下,传统双矢量MPCC的q轴电流脉动较大,而所提的鲁棒双矢量MPCC消除了模型参数失配导致的电流预测误差,具有更小的电流脉动和跟踪误差。

(a) 传统双矢量MPCC(b) 所提鲁棒双矢量MPCC(L0=0.5 L,ψf0=0.5ψf)

(c) 传统双矢量MPCC(d) 所提鲁棒双矢量MPCC(L0=1.8 L,ψf0=1.5ψf)图7 电感和永磁体磁链都存在参数失配时的q轴电流响应
6 结论
针对双矢量模型预测电流控制因参数失配导致性能下降的问题,本文提出一种鲁棒双矢量模型预测电流控制策略。基于无模型控制的思想,提出了一种改进的超局部模型替换原有的电流预测模型,并设计扩展滑膜观测器对未知扰动进行准确观测。仿真实验结果表明,相较于传统双矢量模型预测电流控制,所提方法大幅降低了参数失配对系统性能的影响,具有更小的电流脉动和更强的电流跟踪能力,既保留了传统FCS-MPC快速响应的优点,又提高了系统在参数失配时的暂稳态性能。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27 06:29:22
雷达学报(2018年3期)2018-07-18 02:41:26
电测与仪表(2016年10期)2016-04-12 00:26:38
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电源技术(2015年5期)2015-08-22 11:18:12
仪表技术与传感器(2015年12期)2015-06-08 04:26:33
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年23期)2014-04-04 12:08:30