一种新型模糊神经网络滑模控制器设计*
2023-10-21 08:59:42王一凤刘雪梅王春禹
组合机床与自动化加工技术 2023年10期
焦 帅,张 斌,韩 旭,王一凤,刘雪梅,王春禹
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学,北京 100049)
0 引言
永磁同步电机(PMSM)由于其优越的特性,在机床、工业控制等领域得到大量应用。它是由参数时变的高阶复杂动力学组成的非线性系统。在永磁同步电机的闭环控制中,控制算法的研究是一项重要的内容,学者们提出了很多的控制算法用来提高闭环控制系统的性能。
高芮等[1]采用新型趋近律,并且基于super-twisting算法设计了三阶滑模观测器,系统的转速控制精度有了显著地提高。刘春光等[2]建立了永磁同步电机转速ADRC模型并且完成了转速ADRC的参数整定,有效改善了系统的动态性能。邓豪等[3]中在传统滑模面的基础上设计了分数阶滑模面并且提出了一种新型的快速趋近律,并且引入粒子群算法对参数进行整定,永磁同步电机的动态性能和稳态性能都得到了改善。
近些年来,随着群体智能优化算法的兴起,群体智能优化算法与传统的电机控制算法相结合正成为一种潮流。利用群体智能优化算法可以有效提升传统的电机控制算法的性能[4]。
本文设计了基于改进麻雀算法(SSA)的模糊神经网络滑模控制器(FNNSMC)并将其应用到了PMSM矢量控制系统中。为了验证算法的有效性,采用FNNSMC、基于SSA的FNNSMC和基于改进SSA的FNNSMC三种算法进行对比实验,仿真结果验证了所设计算法的有效性。
1 永磁同步电机数学模型
PMSM在d-q旋转坐标系下的数学模型为:
(1)
式中:Ud、Uq、id、iq、Ld、Lq分别为d、q电压、电流和电感,Rs为定子电阻,ψf为永磁体磁链,ωe为电角速度。
(2)
式中:ψd、ψq为d、q轴下的定子磁链,Pn为电机极对数。
电磁转矩方程如下:
(3)
本文分析的永磁同步电机为表贴式永磁同步电机,所以Ld=Lq。因此式(3)可变为:
(4)
机械运动方程为:
(5)
式中:TL为负载转矩,B为粘滞摩擦系数,J为转动惯量,ω为机械角速度。
(6)
式中:d(t)为系统的总体不确定项。
2 基于改进SSA优化的FNNSMC设计
基于改进SSA优化的FNNSMC总体框图如图1所示。

图1 基于改进SSA优化的FNNSMC总体框图
2.1 SMC设计
采用滑模等效控制法,FNNSMC的输出由SMC的输出ueq和FNN的输出us两部分组成。可将控制量的输出设计为[5-6]:
u=ueq+us
(7)
式中:ueq为滑模等效控制量,ueq的作用使系统状态始终在滑模面上;us为切换增益,作用是使系统状态不离开滑模面。
定义速度跟踪误差为:
e(t)=ωr(t)-ω(t)
(8)
式中:ωr(t)为给定速度值,ω(t)为实际速度值,设计滑模面为:
(9)
式中:c′为滑模变结构切换系数,c′影响着系统的动态性能,当c′过大时,静态性能会受影响。
对式(9)的滑模面求导可得:
(10)
根据式(10),在d(t)=0的条件下,可求出SMC的等效控制律ueq为:
(11)
在实际的应用中,为消除d(t)的影响,设计控制律us为:
(12)
结合式(11)和式(12),得到SMC的控制律为:
(13)
式中:η为正常数,且η>|d(t)|。
定义Lyapunov函数为:
(14)
结合式(10)对式(14)求导可知:

(15)
综上所述可以从理论上保证系统状态点收敛到0。
2.2 模糊RBF神经网络控制器的设计
模糊RBFFNN是在模糊控制的基础上,结合RBFNN迭代学习的一种智能控制策略。
本文设计的RBFFNN为两输入一输出的4层结构。RBFFNN的最终输出为切换增益us。该RBFFNN信号传递及结构功能如下:

f1(i)=xi,i=1,2
(16)
第2层为模糊化层:第2层每一个节点的输出等同于一个隶属度函数,采用高斯函数作为隶属度函数:
(17)
式中:cij和bj分别是第i个输入变量的第j个模糊集合高斯函数的均值和标准差。
第3层为模糊推理层:设定相应的模糊推理整定规定,对信号进行模糊推理运算:
(18)

第4层为输出层:第4层中每个节点的输出为该节点所有输入信号的加权和:
(19)
式中:l为输出层节点的个数,在本文中,l=1;W为第4层节点与第3层节点的连接权值矩阵。
2.3 改进麻雀搜索算法
FNNSMC的参数值通常一般通过自适应律来更新。但这种方法往往无法求出最合适的参数值。以至于对整个控制器的控制效果产生影响,为了使控制器始终保持最佳的控制精度。因此引入改进麻雀算法用来求出参数值的最优解。
需要改进SSA优化的参数主要有:
(1)RBFFNN的权值w、均值cij以及标准差bj。
(2)SMC的滑模变结构切换系数c′。
2.3.1 麻雀搜索算法
SSA是一种新型的群体优化算法[7-9]。麻雀种群通常分为发现者,也称探索者,在寻找食物的过程中,先得到食物的是具有较好适应度值的发现者,它的搜索范围也是最大的,因为发现者需要给整个种群寻找食物;加入者,也被称为追随者,能量过低时会自由移动;以及遇到危险时做出相应反捕食行为的警戒者。
麻雀的位置用下列矩阵表示:
(20)
所有麻雀的适应度值表示为:
(21)
式中:矩阵的每一行代表个体的适应度值。
发现者的位置更新方法如下:
(22)

追随者的位置更新描述如下:
(23)
式中:A为1×d的矩阵,矩阵中的元素被随机赋值为1或-1,且A+=AT(AAT)-1;Xp为发现者所在的最优位置,Xworst为目前全局最差的位置。
麻雀种群中约为10%~20%为警戒者,假设初始化位置是随机产生的,位置更新如下:
(24)
式中:Xbest为此时全局最优位置,β为步长控制参数,随机数,服从均值为0,方差为1的正态分布;K为麻雀移动的方向,K∈[-1,1];fi为此时第i个体的适应度值,fg和fr分别表示目前全局最优和最差的适应度值,ε的作用是防止分母为0。
2.3.2 改进麻雀搜索算法
分数阶微积分将微积分从整数推广到分数,最为常用的定义为G-L定义。为了加快SSA的收敛速度以及防止其陷入局部最优,将分数阶与SSA结合,通过种群中个体位置更新自适应改变分数阶阶次[10-12]。
G-L定义的离散表达式为:
(25)

令式(25)中的β=4,可以得出:
(26)
将分数阶与式(22)相结合,当R2≥ST时,意味着种群中一部分群体发现危险并发送警报,发现者的位置更新可以描述为:
(27)
式(27)的左边为分数阶次v=1且周期为1的离散形式,即:
Dv[x(t+1)]=Q·L
(28)
由式(26)可知,当R2≥ST时,发现者的位置更新可以表示为:
(29)
由式(29)可知分数阶次影响发现者的位置更新,利用进化因子f修正分数阶阶次v。
(1)当R2≥ST,发现者i到其它麻雀的平均距离为:
(30)
式中:N和D分别表示追随者的个数和维数。
在进化过程中,追随者当前的状态由进化因子f决定,其定义为:
(31)
式中:dg为全局最优位置到其他麻雀的平均距离,dmax和dmin为所有dix的最大值和最小值。

算法的具体流程图如图2所示。

图2 改进SSA流程图
2.4 目标函数的设计
常见的目标函数有ITAE、ITSE、ISP三种,本文采用ITAE指标。其计算公式如下:

(32)
ITAE是综合描述系统动态性能比较有效的指标。
3 仿真实验
为了验证所设计算法的有效性,在SIMULINK中搭建了PMSM矢量控制调速系统,结构图如图1所示。PMSM的参数设置为:定子电阻为2.875 Ω,转动惯量J为0.008 kg·m2,极对数Pn为4,电感Ld=Lq=0.008 5 H,φ=0.178 Wb,种群规模120,迭代次数100。
3.1 阶跃响应仿真实验
仿真工况为:初始时空载启动,转速参考值为1000 r/min,仿真出的PMSM转速曲线图和转速曲线局部放大图如图3和图4所示。

图3 转速响应曲线图

图4 转速响应曲线局部放大图
由图3和图4可知:当采用FNNSMC时,超调量较大(5.75%),到达稳态的时间较长;当采用SSA优化的FNNSMC后,到达稳态的时间相对采用FNNSMC时下降了44%,超调量下降为2.45%,相对采用FNNSMC时超调量减小了57.4%;当采用改进SSA优化的FNNSMC后,几乎没有超调,稳态时间相对采用FNNSMC时下降了67%。
3.2 模型参数变化实验
为了验证所设计的模型受参数变化时系统的鲁棒性,首先设置转速为1000 r/min,空载启动对于参数变化,本文选择J=J和J=1.5J比较。
图5为采用SSA算法优化的FNNSMC时,不同转动惯量下转速曲线的响应图。图6为采用改进SSA算法优化的FNNSMC时,不同转动惯量下转速响应曲线局部放大图。图7为采用改进SSA算法优化的FNNSMC时,不同转动惯量下转速曲线的响应图。图8为采用SSA算法优化的FNNSMC时,不同转动惯量下转速响应曲线局部放大图。
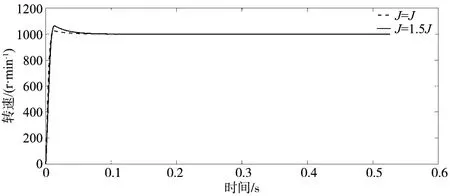
图5 不同转动惯量下基于SSA优化的FNNSMC转速响应曲线图

图7 不同转动惯量下基于改进SSA优化的FNNSMC转速响应曲线图
从图5和图6可以看出,采用基于SSA算法的FNNSMC时,当转动惯量变为原来的1.5倍时,超调量由2.45%增加为6.3%,到达稳态的时间增加了0.023 s。
从图7和图8可以看出,采用基于改进SSA算法的FNNSMC时,当转动惯量变为原来的1.5倍时,超调量没有变化,到达稳态的时间增加了0.011 s。
经过仿真验证,当采用基于改进SSA的FNNSMC时,转速的变化波动和系统受自身参数变化的影响较小。
3.3 负载扰动实验
初始时设定转速为1000 r/min,空载启动,在0.5 s时突加8 N的负载扰动,突加负载时不同算法的转速响应曲线如图9所示。图10为负载变化时,不同算法的转速响应曲线放大图。

图9 负载变化时转速响应曲线图

图10 负载变化时转速响应曲线放大图
当采用FNNSMC时,转速的下降幅度为10.5%,转速恢复时间为0.25 s,当采用基于SSA算法优化的FNNSMC时,转速下降幅度为5.4%,转速恢复时间为0.15 s。当采用于基于改进SSA算法优化的FNNSMC时,转速下降幅度为2.2%,转速恢复时间下降为0.06 s。
本文设计的基于改进SSA算法的可以显著地提高系统的抗负载扰动能力。
4 结论
本文设计了一种新型模糊神经网络滑模观测器,新型模糊神经网络滑模控制器中利用改进麻雀搜索算法对控制器的参数进行更新。仿真结果表明所设计的新型模糊神经网络滑模控制器动态性能较好,抵抗负载扰动和模型参数的能力较强。
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
法律方法(2018年2期)2018-07-13 03:21:42
魅力中国(2017年6期)2017-05-13 12:56:17
中学生数理化·八年级物理人教版(2017年11期)2017-02-15 02:12:21
光学精密工程(2016年3期)2016-11-07 09:03:49
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
振动、测试与诊断(2014年4期)2014-03-01 01:14:01