
基于“探索者”创新平台的图书搬运机器人设计与实现
2023-10-21 01:17:18韩洋HANYang胡文双HUWenshuang赵华ZHAOHua
价值工程 2023年28期
韩洋HAN Yang;胡文双HU Wen-shuang;赵华ZHAO Hua
(南阳理工学院智能制造学院,南阳 473004)
0 引言
现如今,全球多数图书馆都是采用人工方式进行图书的存取和放置工作,但这种传统的图书管理方式既费时又费力。并且,图书是人类记录知识最有效的方式,随着时代的进步,图书的数量只会越来越多。因此,如何使图书管理人员从繁杂的机械式劳动中解脱出来,以进一步提高图书的管理效率以及降低图书馆日常运营成本,是一个亟待解决的问题。本文基于“探索者”创新平台,设计了一种在图书馆场景下能够自动识别、抓取、存放,且具备循迹、避障等功能的图书搬运机器人。
1 图书搬运机器人结构设计
本设计最终目的是机器人能够在图书馆中完成图书的自动搬运工作,解放人力劳动。因此,设计时需要考虑实际图书馆中书架的距离间隙、地面的斜度、高度以及光滑程度,同时考虑到机器人需要长时间代替人来完成机械运动,且图书馆环境相对安静,还要对其续航时间和噪声大小等提出要求,最终确定的机器人机械结构主要技术指标如表1 所示。
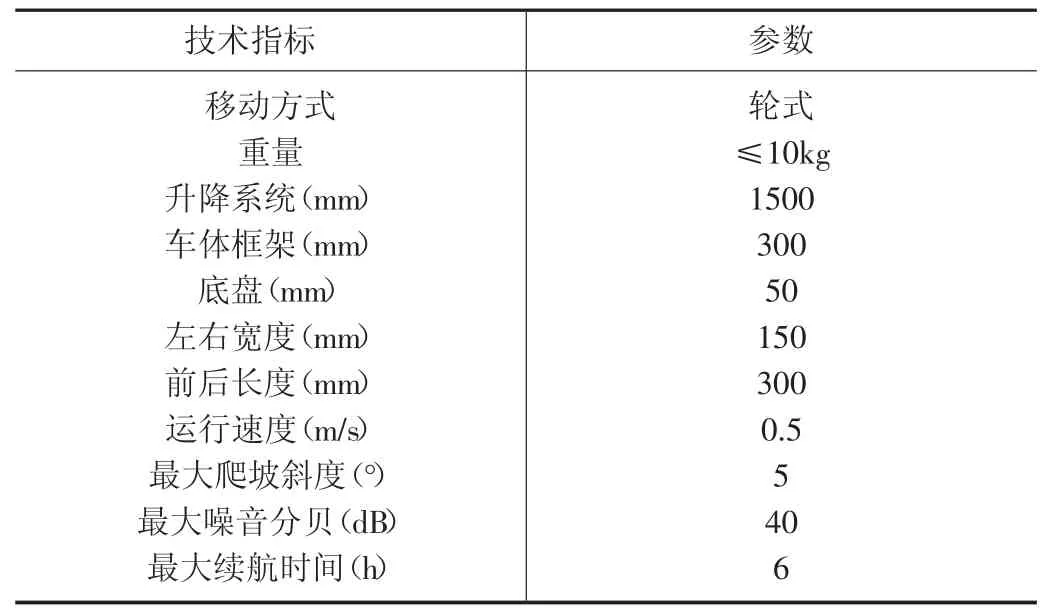
表1 机械结构主要技术指标
根据任务要求,本文设计的图书搬运机器人机械结构组成如图1 所示,主要包含移动机构、拾取机构和辅助机构等。其中移动机构的任务是为机器人提供移动能力,完成转向和续航指标;拾取机构的任务是完成对于图书的拾取和放置工作;辅助机构的任务是辅助拾取机构完成放置目的,弥补机器人自由度上的缺陷及提高机器人工作效率。针对不同的任务需求,利用模块化的设计方式进行设计,提高设计效率的同时,有利于组织专业化生产、降低成本和提高质量。
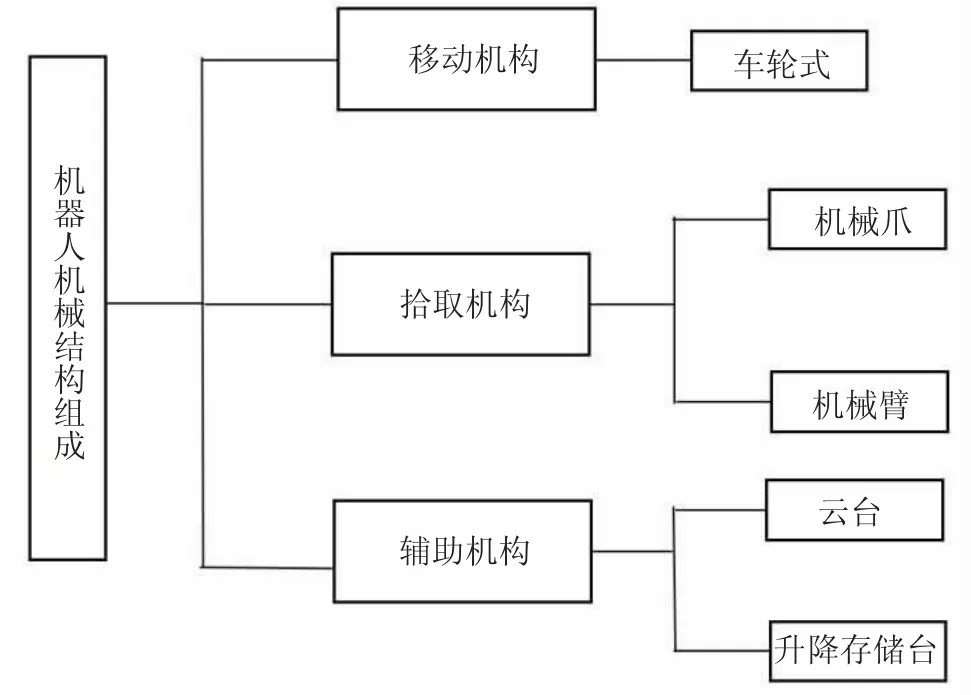
图1 机器人机械结构组成
1.1 移动机构
移动机构是图书搬运机器人实现寻迹、避障等功能的基础,也直接影响了其续航时间和运动灵敏度,轮式移动方式在经济和结构上有着突出的优势,并满足机器人技术指标。
轮式移动方式主要根据其所用车轮的数量来进行划分,可分为三轮、四轮及多轮(五轮以上),其中五轮以上的多轮运动方式过于复杂,对于机器人的成本而言,得不偿失。故运动方案在三轮和四轮之间进行选择。
1.1.1 三轮式 一般的三轮式移动方式为两个驱动轮加一个万向轮的布置,此移动机构简单、紧凑,具有一定的承载能力和转向能力,但其稳定性较差,尤其是在转向时容易发生侧翻的情况。
1.1.2 四轮式 这是绝大多数移动机器所采用的运动方式,可分为双电机驱动和四电机驱动。对于承载力而言,双电机驱动和四电机驱动相差不大,但四电机驱动拥有更加强大的动力和更出色的续航能力。
图书搬运机器人要在图书馆内代替人进行图书的存取和放置工作,所以需要较好的稳定性、较高的承载能力和出色的续航能力,且增加两个电机对于成本的影响不大,故选择四轮驱动中的四电机驱动方式。
驱动电机是图书搬运机器人的动力来源,也是最终决定机器人能否稳定运行以及长时间续航的一个重要因素[1]。通过对驱动电机总驱动力和功率的计算,初步选择驱动电机的型号[2]。
车轮与轴承间的摩擦力计算公式[3]:
式(1)中,P—车轮轮压;D—车轮直径;d—轴直径;μ—车轮与轴承的摩擦因素。
式(2)中,N—正压力;f—摩擦因素。
惯性阻力Wg的计算公式:
式(3)中,a—加速度;g—重力加速度;G—移动机构总质量。
式(5)中,f—车轮与地面的摩擦因素;N—机器人对地面的正压力;D—车轮直径。
式(6)中,v—驱动轮线速度;D—车轮直径。
式(7)中,TL—驱动转矩T 代替;η—机械效率。
式(8)中,ta—加减速时间;G—车轮重量;D—车轮直径。其中,
根据表1 中的技术参数,初步确定图书搬运机器人重量为10kg,μ=0.01,d=6mm,D=64mm,可以得到图书搬运机器人的总驱动力为
依据得出的总驱动力,可确定每个轮受到的驱动力为FL(R)=28.6N。
因此力矩Tf为
根据Tf的理论计算结果,最终选择的电机型号为JGB37-520。
1.2 拾取机构
图书搬运机器人需要具有升降存储以及自动拾取图书的功能,因此确定拾取机构由升降存储台、多自由度的机械臂和机械爪组成[4]。
机械爪作为末端执行器,是机器人完成抓取功能最直接的部件。它需要仿真人类手部的运动方式,对物品进行拾取。由于图书的横截面积较小,故选用传统的机械式夹取器。
本文设计的机械式夹持器为双指手爪式,它依靠手爪的回转运动来实现夹取,属于回转型手爪。其工作原理为:用舵机带动其中一边的手爪零件运动,再通过齿轮啮合带动另一边的手爪零件运动实现手爪的抓取动作[5]。且其末端夹取杆上配有多个M3 螺纹孔,方便后期对于夹取器的扩展和修改。
机械臂是模仿人类手臂的机械部件,它是机器人整体中自由度最多,控制难度最大的部位。在设计时,机械臂的结构要尽可能的紧凑,采用强度高而质量小的轻质材料,安装时,尽可能保持直线,使机械臂整体的重心在可控范围内,提高机械臂的控制精度。
设计的机械臂自由度越多,机械臂就越灵活,但控制难度也会相对增加。本文选择4 自由度的机械臂外加一个旋转云台的方案。增加一个云台,可以使机械臂的整体重心更加集中,底部安装强度增强,利于控制和移动的稳定性。
1.3 辅助机构
为了方便图书拾取,存储台应具有升降功能,利于改变位置高度。本文图书存储台选用结构稳定、运动效率高、安全可靠的X 式剪叉式升降台。同时在底部使用丝杆螺母传动的方式,把电机的转动转化为直行平动的方式,这样不仅有利于系统的稳定性,而且可以提高电机传动效率。
选用的电机需在丝杠受载情况下,带动螺母进行稳定前进,故对丝杠副的转动惯量进行初步计算,根据所计算的数据来选用相对合理的步进电机。
实心滚珠丝杠副转动惯量计算公式为:
因此将直线运动参数转换为旋转运动的转动惯量:
式中:m 为滚珠丝杠副的质量;v 为滚珠丝杠副螺母的线速度;n 为滚珠丝杠的转速;p 为滚珠丝杠的导程。
初步确定参数m=2.24kg,v=0.24m/min,n=60r/min。将以上预估参数带入式(16)中可求得J≈9.073·cm2。
根据所求实心滚珠丝杠副的转动惯量,电机型号选用42HD1403 的电机。并依据STM32 的供电电压为12V,故选用的电机符合所需电压,且质量和转动惯量均符合设计要求,故可以作为实际应用电机。
基于“探索者”创新平台的图书搬运机器人整体装配三维模型如图2 所示,搭建的实物模型如图3 所示[6]。
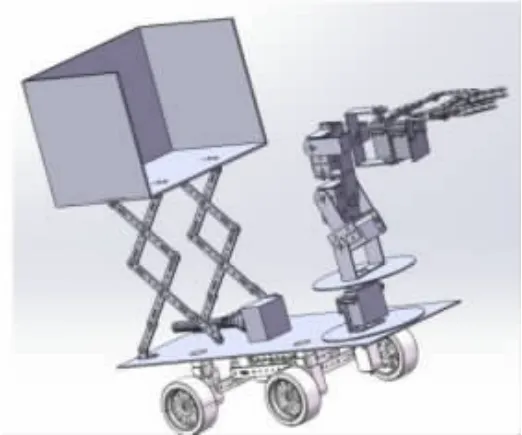
图2 机器人三维模型
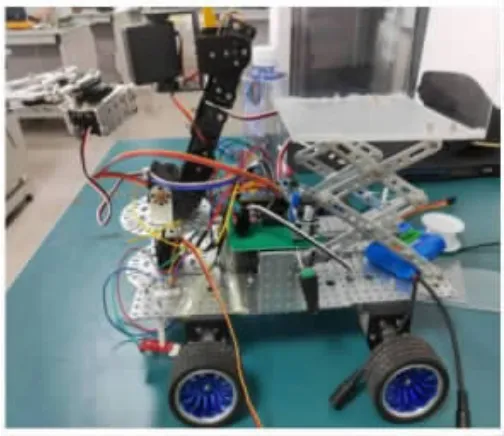
图3 机器人实物模型
2 图书搬运机器人控制系统设计
图书搬运机器人控制系统包含硬件和软件两部分,以STM32F103C8T6 为主控制器,在Keil uVision5 中编写实现相应功能的程序。本文设计的图书搬运机器人需要满足循迹、避障、升降台升降、机械臂运作、条形码识别、蜂鸣器警示等功能。其控制系统设计框图,如图4 所示。

图4 图书搬运机器人控制系统设计框图
2.1 路径规划
在日常取放书的过程中,难免会遇到障碍物,为了提高机器人的工作效率,给机器人加入了路径规划,以统一机器人的工作路径,减少不必要的避障措施。本文选择了口字形运输路线,机器人会按照我们规定的口字形路径进行运输搬运。
2.2 超声波避障
US-100 型超声测距探头在2cm 到10m 的范围内可实现高精度的无接触探测,为机器人的避障工作提供了可靠的基础。另外,它还配有温度传感器,可对超声波模块内部电路进行温度补偿,使模块精度更高且适应性更强,能够准确地标定测量出的距离。
机器人通过实时更新的超声波测距数据进行避障。当超声波传感器数据大于200mm 时,判定为无障碍,执行循迹程序,当小于200mm 时,执行转向程序,具体为先后退一定距离,再转向90 度。后退距离和转向角度通过延时实现。转向完成后继续读取超声波数据并判断,以此循环[7]。
2.3 红外循迹
KEYES 红外循迹传感器模块可以有效地检测和跟踪物体的运动轨迹,并且利用红外线的反射率不同,将光线的强弱转换为电流信号,从而实现对物体运动轨迹的实时监测和跟踪。当左右两边传感器都接受到信号时说明黑线在车轮中央。这时候小车是按黑线正常行驶的,如果左边的传感器没能识别到黑色线,那么左边的传感器就会给单片机一个信号,然后单片机发出指令让左侧的两个轮子停止转动,直到左侧的传感器识别到黑线,两边传感器都能接收到信号时,机器人恢复正常行驶。
2.4 机械臂的抓取及升降台的升降
机械臂对书本的抓取是通过单片机控制六个舵机实现的,本文选择的是RDS3120 舵机,其特点是控制精确、线性度极佳,而且反应迅捷,可以满足各种复杂的操作需求。需要多次调试机械臂的位置,以得到其运作的准确路径。升降台的升降由步进电机进行驱动,通过计算升降的距离以及丝杠螺母的位置,确保升降功能得到实现。
3 结论
本文基于“探索者”创新平台,设计并制作了一种图书搬运机器人[8]。采用多种传感器进行环境信息的实时感知,配合路径规划,经过反复调试,结果表明:在图书馆场景下该机器人能够对图书自动识别、抓取、存放,且具备循迹、避障等功能。但在多次实验后,发现机器人耗电问题较大,且电机的噪声还可以继续减少,以适应图书馆相对安静的环境。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
制造技术与机床(2019年11期)2019-12-04 05:50:26
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2016年11期)2016-11-07 08:43:49
发明与创新(2016年33期)2016-08-21 13:22:16
大社会(2016年3期)2016-05-04 03:40:56
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
科学中国人(2015年25期)2015-02-28 09:15:27
机械制造与自动化(2014年1期)2014-03-01 04:21:45
